1.本发明涉及相干成像领域和相干激光雷达成像领域。更具体地,本发明涉及在这样的系统中使用的检测器。
背景技术:
2.已知的相干成像领域包括形成由相干源(例如,激光器)照射的场景的图像,其经由成像光学器件将该场景成像在检测器上。这种类型的成像又称为有源成像,因为检测器与其自己的照射源(通常为激光器)相组合,从而在观测时刻照射该场景。特定的波长的使用使得例如通过对可见光散射但不对照射光散射的元件对场景成像或者对夜景成像成为了可能。使用激光雷达对场景成像利用了激光源的发射的相干性质来使由场景反射的可用信号放大,其使用了来自参考路径的与该可用信号相干的信号。
3.相干激光雷达的原理是现有技术中公知的。相干激光雷达包括通常为激光器的发射相干光波(在ir、可见或者近uv范围内)的相干源、允许空间体积被照射的发射设备、以及收集被目标t反向散射的光波的一部分的接收设备。反向散射波的多普勒频移取决于目标t的径向速度v:在接收时,具有信号频率fs的接收到的反向散射光波(被称为信号波s)与所发射的波的尚未经过场景的一部分(被称为lo(本机振荡器)波,其具有本机振荡器频率f
lo
)混合。这两个波的干涉被光电探测器pd探测到,并且探测器的输出的电信号除了具有与接收功率和本机振荡器功率成比例的项之外还具有被称为差拍信号sb的振荡项。这一信号被数字化,并且由其提取出位于所要观测的场景中的对象的位置的信息。
4.在调频相干激光雷达(被称为fmcw(调频连续波)激光雷达,如图1中示意性所示)中,相干源的光学频率f被调制,该调制通常使用周期性线性斜变。
5.因而,fmcw激光雷达成像包括以下步骤:
6.‑
调制相关光源(例如,激光器)的电磁频率,
7.‑
通过分光元件将激光器发射的射束分成两条路径:照射场景的点的第一路径,所述光接下来从该点被反向散射,并且光的一部分抵达光感受器;以及参考路径(本地振荡器),其不经过该场景,并且采取更短的路线以抵达光电探测器,
8.‑
在给定延迟(即所采取的光学路线的差)的情况下利用不同波长/频率,使两条路径复合,即,使用复合器元件使它们在空间上叠加,并且因此两条路径发生干涉,尤其是在光电探测器上。干涉表现为发光强度上的时域振荡或者差拍,其频率与两条路径之间的延迟成比例,并因此与距离成比例。由光电探测器测量差拍,并且所要测量的距离与差拍的频率成比例。
9.更具体地,对于线性斜变而言,振荡的频率为:
[0010][0011]
其中,b是在斜变的持续时间t中的光学频率偏移或“线性调频脉冲”,z是距离,c是光速。
[0012]
距离z是由在持续时间t内测量的周期的数量n(n≈tf
r
)推导出的:
[0013][0014]
该距离解为:
[0015][0016]
还有可能经由差拍信号的傅里叶变换进行谱分析来测量f
r
。
[0017]
干涉信号包含一般大而无用的dc分量,如果光感受器是光电二极管,则通过高通电子滤波将该分量去除。在基于光纤的设置中,可行的是使用3db耦合器,其基于作为输入的两条路径(对象路径和参考路径)提供两个反相位的输出信号,它们照射两个串联的光电二极管(平衡光电二极管)。检测电路使得这两个光电流之间的差分处理成为可能,并因此去除dc(共模)部分,并且检测ac(差拍信号)部分。ac部分一般通过跨阻抗放大器(tia)被外部放大,而后再由外部电子设备(例如,示波器)进行处理,从而测量频率。
[0018]
fmcw激光雷达技术是一种光学外差测量技术(即,其涉及多个光学频率)。该技术对杂散环境光(例如,阳光)高度不敏感。
[0019]
为了生成场景的完整图像,激光雷达使用扫描设备顺次扫描该场景(“卷帘式快门”类型的图像)。
[0020]
在实践中,对于高分辨率图像(例如,vga或xga)而言难以在视频帧速率(通常50hz)上实现距离图像的采集,因为在每个点上可用于距离测量的时间是非常短的。
[0021]
作为逐点实施测量的替代,公开文献aflatouni“nanophotonic coherent imager”(2015,optics express vol.23no.4,5117)(其也使用了fmcw技术)描述了一种设备,其中,由已经被操纵为处于发散状态的激光束同时照射整个场景,并且针对整个场景并行执行光电探测。在这一公开文献(参见图2)中,激光源las通过调制器mod被频率调制,对象路径照射将被分析的对象o,并且透镜l在采用集成光学器件制造的相干成像器ic上(更具体地在由4x4个光耦合光栅res的矩阵阵列上)形成该对象的图像。每个光栅res经由波导将耦合光发送至位于该图像外的横向耦合光电二极管pd(参见图3)。参考路径被经由光纤fib并且经由波导和y形接合部的网络直接发送至光电二极管。对于16个光电二极管中的每个而言,光电流到电压的转换由跨阻抗放大器tia执行。电子滤波和信号处理在电子检测系统sed中的芯片外部执行。
[0022]
这种并行检测整个场景的技术原则上更适于增加距离图像的采集速率。
[0023]
然而,在aflatouni公开文献中描述的成像器的架构中,相干成像器的配置不易于实现对大量像素的缩放。其必须具有用于n个像素的2n个波导(n个用于参考路径并且n个用于对象路径),即,对于1000x1000个像素的成像器而言要有两百万个波导,这带来了巨量路线和占据空间问题。为了人为地增加其成像器的像素的有效数量,作者求助于一种采用成像器的相继机械平移进行多次图像捕捉的技术,但其不适于移动场景。
[0024]
相干成像和激光雷达所固有的另一问题归因于由所要观测的场景反向散射的光的相干性质。由于这一相干性,反向散射的光按照已知的方式表现出被称为散斑的颗粒状结构。在检测级上,对象在传感器的平面中的图像被标记为散斑粒,从统计学的角度上来讲散斑粒的横向尺寸的值为:
[0025]
φg=2.λ.f#
[0026]
其中,f#=f/d,其中,f是成像物镜的焦距并且d是其出射光瞳的直径。
[0027]
因而,对于上文引用的在本公开中描述的激光雷达而言,由于参考路径和受散斑影响的对象路径之间的干涉所导致的差拍在相邻散斑粒之间具有相同频率但是具有随机相移。
[0028]
如果像素(即收集光的阵列)具有比散斑粒的尺寸φg大的尺寸a
pix
,如图4中的左侧所示,则所产生的振荡的幅值被衰减,并且可能变得不可检测。在给定所指示的衍射光栅的尺寸(17x17μm)和1.55μm的波长的情况下,将需要大的孔径数(f#>6)以使散斑粒大于像素。然而,这样的窄孔径光学器件不利于检测相对不反射的对象或者那些位于相当远的距离以外的对象,它们将给出非常小的反向散射光子通量;为了进行补偿,这意味着使用更高功率并因此更高耗电的激光源,其将带来超过眼睛的安全极限的风险。因而,对于允许捕捉更大数量的光子的宽孔径光学器件而言,在1.55μm的眼睛安全波长上散斑粒的尺寸通常小于像素的光收集表面,这带来了检测问题。
[0029]
在检测器仅检测反向散射光时(无差拍相干成像),这些随机分布的粒的存在也带来了检测问题,因为这些粒并非相对于像素的单元检测器的灵敏表面被最佳地先验定位,这降低了系统的灵敏度。
[0030]
本发明的目的在于通过提供一种用于相干成像或相干激光雷达的集成检测器来克服前文提到的缺陷,该集成检测器与高数量的像素兼容并且允许对标记有小尺寸的散斑粒的反向散射光进行最佳检测。
技术实现要素:
[0031]
本发明的一个主题是用于相干成像系统的检测设备,其包括:
[0032]
‑
包括像素的矩阵阵列的检测器,每个像素包括具有光敏表面的光电探测器部件,该检测器被设计为由被称为图像射束的相干射束照射,图像射束由被称为散斑粒的光粒组成,
[0033]
‑
布置在被相干射束照射的一侧上的透射偏转元件的矩阵阵列,偏转元件与包括至少一个像素的一组一个或多个像素相关联,并且被配置为可借助于电信号被单独定向,从而使入射在所述组上的图像射束的一部分发生偏转,并因而修改光敏表面的平面中的散斑粒的空间分布,
[0034]
‑
一个或多个像素的每个组还包括与偏转元件相关联的反馈环,反馈环被配置为对偏转元件致动,从而优化来自由像素的所述组中的一个或多个光电探测器部件检测到的光的信号或信噪比,反馈环包括反馈电路。
[0035]
根据一个实施例,偏转元件选自棱柱、多面体、球形穹面或衍射光学元件。根据一个实施例,每个偏转元件包括至少两个电极,它们分别朝向布置在检测器的表面上的至少两个电极,通过向电极施加电压而以静电方式在平行于检测器的平面的至少一个旋转轴上对偏转元件致动。
[0036]
根据一个实施例,偏转元件与一组n
×
m个像素相关联,反馈是根据在所述组的像素的光电探测器部件检测到的n
×
m个信号来根据优化准则产生的。
[0037]
根据一种变型,该检测器还包括布置在偏转元件的矩阵阵列和光电探测器部件之
间的耦合区的矩阵阵列,耦合区与像素相关联,并且被配置为形成孔径,图像射束穿过所述孔径照射相关联的像素的光电探测器部件,孔径的尺寸小于像素的光敏表面的尺寸。
[0038]
根据一个实施例,偏转元件的矩阵阵列与检测器之间的距离在偏转元件的尺寸的一倍到十倍之间。
[0039]
根据另一方面,本发明涉及相干成像系统,该系统包括:
[0040]
‑
激光源,其被配置为朝所要观测的场景的方向发射激光辐射,
[0041]
‑
根据本发明的检测设备,
[0042]
‑
光学成像系统,其通过将场景反射的射束聚焦在检测器上而形成所述图像射束来产生场景的图像。
[0043]
本发明还涉及一种相干激光雷达成像系统,其包括:
[0044]
‑
激光源,其被配置为发射具有时间调制光学频率的激光辐射,
[0045]
‑
分光/复合光学系统,其至少包括:
[0046]
‑‑
分光器光学系统,其被设计为将激光辐射在空间上拆分成被称为参考射束的射束和被称为对象射束的射束,该对象射束被引向所要观测的场景;
[0047]
‑‑
复合光学系统,其被设计为使参考射束在空间上叠加到被所述场景反射的射束上,从而形成复合射束,
[0048]
‑
根据本发明的检测设备,
[0049]
‑
具有光轴的光学成像系统,其通过将由场景反射的射束聚焦在检测器上而形成所述图像射束来产生场景的图像,
[0050]
分光/复合光学系统和光学成像系统被配置为使得检测器中的每个像素接收图像射束的一部分和参考射束的一部分,并且所述部分在空间上被相干叠加到每个像素上,
[0051]
‑
相干激光雷达成像系统还包括至少一个电子处理电路,其被配置为针对每个像素计算照射所述像素的图像射束的部分和参考射束的部分的差拍的频率,
[0052]
‑
处理单元,其连接至激光源和检测设备,并且被配置为根据与每个像素相关联的计算的差拍频率以及根据激光辐射的经调制的光学频率来确定场景的被成像在所述像素上的点的距离,所述电子处理电路位于检测器中和/或位于处理单元中。
[0053]
根据一个实施例,分光/复合光学系统还被配置为在垂直于所述光轴的被称为中间图像平面的平面中形成参考射束的真实或虚拟中间图像,所述中间平面被布置为在每个被照射的像素上生成通过所述部分之间的干涉获得的淡色(flat
‑
tint)条纹。
[0054]
根据一个实施例,分光/复合光学系统被配置为使得中间图像平面与包括所述光学成像系统的光瞳或光阑的平面一致。
[0055]
根据一种变型,分光器光学系统包括被称为第一集成光电路的集成光电路,所述激光辐射被耦合到第一集成光电路中,第一集成光电路中的至少一个波导引导所述参考射束,第一集成光电路还包括多个波导,所述多个波导均包括被称为对象光栅的至少一个衍射光栅,从而形成对象射束。
[0056]
根据一种变型,复合光学系统包括被称为第二集成光电路的集成光电路,所述参考射束通过光学元件耦合到第二集成光电路中,第二集成光电路包括至少一个波导,所述至少一个波导包括至少一个被称为参考光栅的衍射光栅,参考光栅将参考射束耦合到自由空间中并且耦合到光学成像系统中,第二集成光电路被布置在所述中间图像平面中,从而
参考光栅形成中间图像。
[0057]
根据一个实施例,光学元件是光纤,其将所述参考射束从第一集成光电路引导至所述第二集成光电路。
[0058]
根据另一种变型,分光/复合光学系统包括被称为第三集成光电路的集成光电路,所述激光辐射被耦合在第三集成光电路中,所述集成光电路包括分光器光学系统和所述复合光学系统。
[0059]
根据另一种变型,分光/复合光学系统还包括被布置在分光器光学系统之后并且被布置在复合光学系统之前的中间光学系统,中间光学系统被设计为聚焦参考射束并且形成所述中间图像。
[0060]
根据一个实施例,光学成像系统的数值孔径和激光射束的波长被确定为在适用的情况下使得所述散斑粒的横向尺寸小于或等于像素的光敏表面的尺寸并且大于或等于耦合区的尺寸。
[0061]
下文的描述给出了本发明的设备的若干示例性实施例:这些示例不限制本发明的范围。这些示例性实施例不仅具有本发明的基本特征,还具有所讨论的实施例所特有的额外特征。
附图说明
[0062]
根据遵循并且参考附图的具体实施方式,本发明将得到更好的理解,而且其目的和优点将变得显而易见,附图是以非限制性示例的形式给出的,并且在附图中:
[0063]
[图1]图1如上文所提及的示出了fmcw调频激光雷达的原理。
[0064]
[图2]图2如上文所提及的示出了根据现有技术的部分集成fmcw架构。
[0065]
[图3]图3如上文所提及的示出了由图2中描述的系统执行的相干复合。
[0066]
[图4]图4如上文所提及的针对检测器的像素示出了散斑几何形状的两种情况,左侧的图示对应于散斑粒小于像素的尺寸,并且右侧的图示对应于散斑粒大于像素的尺寸。
[0067]
[图5]图5示出了根据本发明的用于相干成像系统的检测设备的原理。
[0068]
[图6]图6示出了偏转元件的矩阵阵列对照射射束在像素的平面中的散斑场的形貌进行全局修改的方式。
[0069]
[图7]图7示出了具有静电致动模式的偏转元件的三个示例性实施例。
[0070]
[图8a]图8a示出了能够围绕水平轴枢转的棱柱形状的偏转元件。
[0071]
[图8b]图8b示出了能够围绕两个水平轴枢转的作为屋顶状多面体的偏转元件。
[0072]
[图9]图9示出了根据本发明的检测设备的一种变型,其还包括耦合区的矩阵阵列,该耦合区的矩阵阵列布置在偏转元件的矩阵阵列与光电探测器部件之间。
[0073]
[图10]图10示出了偏转元件和耦合区是如何使选择单个散斑粒并且对其做出最佳定位从而使其被光电探测器检测到成为可能的。
[0074]
[图11a]图11a示出了“背面”类型检测器的一个实施例。
[0075]
[图11b]图11b示出了“正面”类型检测器的一个实施例。
[0076]
[图12]图12示出了根据本发明的相干成像系统。
[0077]
[图13]图13示出了根据本发明的激光雷达成像系统。
[0078]
[图14]图14示出了根据本发明的检测设备的示意性垂直截面和水平截面,并且示
出了根据本发明的在激光雷达的情况下的偏转元件对散斑场的影响。
[0079]
[图15]图15示出了到达光感受器的光子通量。
[0080]
[图16]图16示出了参考射束的截面、图像射束的截面和耦合区的截面的三种简单和示意性的示例性分布。
[0081]
[图17]图17示出了借助于偏转元件de由光感受器检测到的ac信号的幅值的优化。
[0082]
[图18]图18示出了本发明的激光雷达的第一种变型的第一实施例(制导光学器件)。
[0083]
[图19]图19示出了本发明的激光雷达的第一种变型的第二实施例(制导光学器件)。
[0084]
[图20]图20示出了本发明的激光雷达的第二种变型(自由空间中间光学器件)。
具体实施方式
[0085]
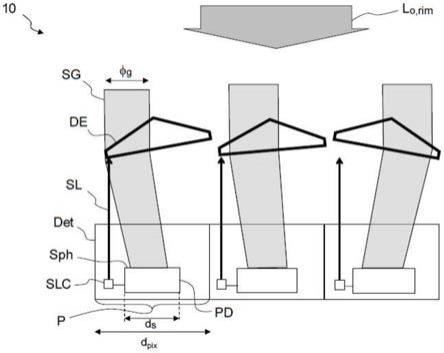
图5示出了根据本发明的用于相干成像系统的检测设备10的原理。设备10包括检测器det,检测器det包括像素p的矩阵阵列,每个像素p包括具有光敏表面sph的光电探测器部件pd。典型地,像素dpix的尺寸从几微米到几十微米。优选地,dpix在3μm和25μm之间。
[0086]
与上文描述的aflatouni公开文献相对比,由于每个像素包括其自己的检测器,因而有可能在没有因多个波导引起的路由和块问题的情况下访问大量的像素。
[0087]
检测设备旨在被集成到相干成像系统中或者激光雷达中,并且因此被设计为由被称为图像射束lo,rim的相干射束照射,该图像射束由被称为散斑粒sg的光粒组成,如上文所解释的。
[0088]
典型地,像素还按照已知方式包括用于由光电二极管检测到的信号的读出和预处理的电子电路,预处理包括放大和滤波。
[0089]
设备10还包括透射偏转元件de的矩阵阵列,该矩阵阵列被布置在相干射束的照射的一侧上。偏转元件与包括至少一个像素的一组一个或多个像素相关联。偏转元件de被配置为可通过电信号被单独定向,从而使图像射束的入射在该组上的一部分发生偏转,并因而修改散斑粒sg在光敏表面的平面中的空间分布。
[0090]
每个组的一个或多个像素还包括与偏转元件相关联的反馈环sl,反馈环sl被配置为对偏转元件致动,从而优化(优选地最大化)来自由该组像素的一个或多个光电探测器部件检测到的光的信号或信噪比。因而,反馈环确保散斑粒相对于光敏表面sph的最佳分布。
[0091]
反馈环包括反馈电路slc,反馈电路slc根据由该组的像素的光电探测器部件检测到的一个或多个信号来根据优化准则向偏转元件输送电信号。
[0092]
元件de具有非恒定厚度,并且可在一个轴上或者在两个轴上被定向,这一个或多个旋转轴垂直于检测器的平面。优选地,其选自棱柱(在一个轴上旋转)、多面体、球形穹面(参见图7,其示出了这三种形状)或衍射光学元件。个体偏转元件的尺寸就是像素或者一组连续像素的尺寸,即,在实践中从几微米到几百微米。
[0093]
在相干成像或激光雷达中,来自场景的并且入射到偏转元件的矩阵阵列上的射束是散斑场,其被称为是主观的(subjective),因为它是由光学成像系统形成在场景的图像中的散斑。在忽略光学系统的几何像差的情况下,散斑粒的横向特征尺寸为2.λ.f#,其具有与光学系统的艾里斑或衍射斑相同的幅值量级。
[0094]
偏转元件de的矩阵阵列对像素的平面中的照射射束的散斑场的形貌进行全局修改,尤其对散斑粒sg的分布进行全局修改,如图6中所示。在这一示例中,每像素有一个元件de。φg表示像素的平面中(即光电探测器的及其光敏表面的平面中)的散斑粒的截面的平均直径,其保持与偏转元件的矩阵阵列的上游相同的幅值量级,从而给出了(参见上文):
[0095]
φg=2.λ.f#
[0096]
在偏转元件的取向被修改时,其还修改散斑粒在像素的平面中的分布,并因此修改粒相对于sph的布置,从而允许入射光被检测到。力求将散斑粒放在pd的光敏表面上的中央。这一对散斑场的修改一般是复杂的而且难以进行分析性描述的,因为偏转元件是在衍射模式下操作的,即,与它们的相对较小的个体横向尺寸以及它们的矩阵阵列组织有关的衍射的影响是不可忽略的。
[0097]
在实践中,相对于像素的表面的局部散斑场被盲改。散斑在像素的表面处的初始分布或最终分布不是已知的。
[0098]
对于相干成像应用而言,通常寻求优化信噪比,优选地最大化信噪比。因此,由该组的一个或多个光电探测器检测到的一个或多个信号被用作反馈信号以用于对偏转元件的致动。在用于一组像素的偏转元件的情况下,借助于多个检测到的信号,偏转元件的位置是对这些检测到的信号施加优化准则的结果。
[0099]
对于激光雷达应用而言,偏转元件的致动旨在增加由光电二极管pd检测到的外差信号。这一操作开始于由光电探测器输送的初始ac信号,其对应于激光雷达的差拍信号(检测到的信号的可变分量)。偏转元件的取向在一个方向上被修改:如果ac信号增加,则继续进行这一操作,并且如果ac信号下降,则在另一个方向上进行定向。在具有一个或两个维度的问题中通过遵循优化算法而寻求ac信号的最优结果,所述一个或两个维度取决于旋转元件的旋转轴的数量是一个还是两个。有可能达到局部值或者绝对最大值,但是在任何情况下在一个比ac信号的初始值高的值上。如果ac信号最初为零或者接近零,则对可用空间进行扫描,直到获得信号为止。由每个光电探测器检测到的ac振荡信号因此被用作偏转元件的致动的反馈信号:在对偏转元件致动时被最大化的是这一ac信号。通过使ac信号最大化,使检测到的信噪比最大化,即,通过限制散斑的影响增加外差信号,并因此改善外差效率(详细计算进一步参见下文)。
[0100]
因而,根据本发明的检测设备10使得改善标记有散斑的相干光的检测成为可能。
[0101]
在偏转元件与一组n
×
m个像素相关联时,根据由该组的像素的光电探测器检测到的n
×
m个信号产生反馈,并且优化算法具有n
×
m个输入。于是,元件de的偏转对应于该组的各个像素之间的权衡。
[0102]
在散斑粒的尺寸(平均直径φg)小于像素的尺寸(由dpix表示)直至光电探测器的表面sph的尺寸的幅值量级的尺寸乃至略微更小时,图5和图6中描述的偏转元件的使用尤为合适。典型地,sph是方形或矩形形状,并且ds是其最小尺寸。
[0103]
因而,检测器被集成到的系统的尺寸被设定为使得粒sg的直径φg在以下之间:
[0104]
ds/2≤φg≤dpix
[0105]
像素的光敏表面的比例被称为像素的填充因数。取决于技术,这一因数从百分之几到100%变化,并且因此比值ds/dpix取决于技术而高度可变。在这一比值在百分之几和85%之间时,偏转元件的存在是有利的。
[0106]
尺寸ds通常从几微米到几十微米。这些尺寸与优选地用于尽可能多地捕捉来自场景的光的相对宽孔径的成像光学器件兼容。作为示例,对于λ=1.55μm和f#=3而言,φg具有10μm的量级。
[0107]
在散斑粒更小,使得多个粒能够共同出现在表面sph上时,这对外差检测有害(参见上文)。设备10的一种变型解决了这种情况,并且下文将对其做进一步描述。
[0108]
图7示出了具有静电致动模式的偏转元件的三个示例性实施例。图7a示出了棱柱,图7b示出了屋顶状多面体,并且图7c示出了透镜。反馈电路slc未示出。
[0109]
从上文可见,偏转元件采取了具有非恒定厚度的板的形状,该板能够围绕至少一个水平轴ra枢转,并且在垂直于这一旋转轴的方向上在两侧上由两个横向臂ma固定,如图8a中针对棱柱(一个旋转轴)所示和图8b中针对屋顶状多面体所示。所述臂连接到在像素的外围的固定刚性框架fr。就两个旋转轴而言,存在两个框架,并且一个能够相对于另一个枢转(图8b)。
[0110]
静电致动使用一组电极。在平行于检测器的平面的至少一个旋转轴的方向上,每个偏转元件包括至少两个电极e’1、e’2,它们分别面向布置在检测器的表面上的至少两个电极e1、e2,通过向电极施加电压而以静电方式对偏转元件致动。电极e1和e2(以及适用情况下的两个额外电极)位于像素的表面处,从而面向偏转元件的电极。偏转元件的电极e’1、e’2(以及适用情况下的e’3、e’4,参见图11b)位于偏转元件的上表面上或内部。
[0111]
像素上的电极可以处于相同电势,并且偏转元件的那些电极处于不同电势,或反之亦然。施加不同电压使得产生垂直指向的静电场成为了可能,该静电场的方向允许各个电极相互吸引。
[0112]
允许对电极的电压进行反馈控制的电子部件(电路slc)可以位于cmos中,该cmos与用于像素或者该组中的一个像素(在一个偏转元件用于一组像素时)的读出电子器件处于同一级。
[0113]
优选地,偏转元件的矩阵阵列与检测器之间的距离在偏转元件的横向尺寸的一倍到十倍之间。
[0114]
根据图9中所示的一种变型,检测设备10还包括耦合区cz的矩阵阵列mcz,其布置在偏转元件的矩阵阵列与光电探测器部件之间。耦合区与像素相关联,并且被配置为形成孔径,图像射束lo,rim通过孔径照射相关联的像素的光电探测器部件。孔径的尺寸dc小于像素的光敏表面sph的尺寸ds。
[0115]
来自于场景并且入射到耦合区上的光穿透到光电探测层,而落在耦合区外的光则不被检测。应当指出,在耦合区具有大约一个波长到几个波长的小尺寸时,所述光在耦合区的下游被衍射。
[0116]
耦合区cz例如由遮挡物(对于工作波长不透明的材料层)限定。
[0117]
像素的耦合区cz优选地具有圆形,从而与散斑的颗粒形状最佳地匹配。耦合区的尺寸使得单个散斑粒经过其中。在dc是其特征尺寸(圆盘的直径或者方形的边或矩形的对角线)的情况下,则优选地:
[0118]
d
c
≤φ
g
。
[0119]
在耦合至偏转元件之后,耦合区使得借助于反馈环选择单个散斑粒sg并且对其最佳地定位以使其被光电探测器检测到成为可能,如图10中所示。
[0120]
耦合区的存在通过使像素大于散斑粒而消除了像素尺寸约束,这有助于电子检测电路的设计。对于激光雷达应用,所释放出的空间有助于计算拍频的电子信号处理电路的设计,或者允许提供更加复杂精密的电子信号处理电路(例如,达到周期的一部分的更精确的计数电路或者用于利用交替的上升斜变和下降斜变同时测量对象的距离和纵向速度的电路),如对于fmcw激光雷达的文献中已经针对场景的给定点所示范的。
[0121]
在散斑粒的尺寸(平均直径φg)小于dpix并且大于dc/2,即如下式所示时,使用图9和图10中描述的与耦合区相关联的偏转元件是适当的:
[0122]
dc/2≤φg≤dpix
[0123]
在散斑粒过小时,所检测到的信号过弱,不能允许令人满意的检测。
[0124]
优选地,偏转元件的矩阵阵列与检测设备之间的距离在偏转元件的尺寸的一倍到十倍之间。
[0125]
检测器det是在半导体基板sub中制造的,在该半导体基板上布置有在电介质介质中的被称为互连层的层il,其包括连接至电子电路的金属互连im。
[0126]
根据一个优选实施例,检测器是“背面”类型检测器(bsi),如图11a中所示。
[0127]
在这种微电子领域中已知的构造中,光入射到半导体基板sub(被减薄的)的与金属互连相对的一侧上。在本发明的上下文中,电子驱动器、用于像素的读出和预处理电路cept以及反馈电路slc优选位于半导体基板的面向互连的界面上。需要穿过半导体的过孔4对面向偏转元件的电极进行偏置。耦合区的矩阵阵列mcz根据示例由金属或吸收层中的孔径限定,该金属或吸收层是专为这一目的提供的并且被布置在基板的照射侧上。
[0128]
减薄后的基板接合到与层il’相关联的载体基板sub’,在层il’中可以包括cmos电路(于是,成像器被称为“3d堆叠”成像器)。这些电路是用于计算拍频的处理电路pc(其位于像素中或者检测器的外围)并且可选地是cept电路中的一些或全部。“3d堆叠”允许通过将包括至少信号处理电路的电路的一部分移动到载体基板sub’而允许电子器件设计的更高自由度。像素的整个表面可用于处理电路,该处理电路可以是复杂的。
[0129]
再次根据另一个常规的实施例(其被称为“正面”(fsi)类型,如图11b中所示),照射经由正面发生,即,金属互连所位于的基板sub的面。在这种fsi构造中,检测器的操作所需的所有电子电路(由晶体管、滤波器等组成)形成在半导体的表面上:用于光电二极管的驱动器和读出电路cept、反馈电路slc、以及用于测量差拍的频率的信号处理电路pc。根据一个实施例,耦合区可以由金属互连3本身限定,金属互连形成了用于光的中心孔径。根据另一实施例,将包括孔径的例如由金属或吸收物制成的不透明层布置在半导体的表面之上。
[0130]
检测器det被制造在半导体基板中,该半导体基板可以根据所使用的波长不同:例如,对于在可见光或近红外范围内的波长(从0.4μm到1μm的波长),该半导体为si,或者对于0.9μm到2μm的波长,该半导体为ge或iii
‑
v族半导体(asga、ingaas等)。
[0131]
根据另一方面,本发明还涉及相干(或有源)成像系统20,如图12中所示。系统20包括被配置为在要观测的场景obj的方向上发射激光辐射l1的激光源sl1、如上文所述的检测设备10、以及通过将由场景反射的射束lo,r聚焦到检测器上从而形成图像射束lo,rim而产生场景的图像的光学成像系统im1。
[0132]
根据本发明的检测设备10的使用允许改善系统的灵敏度。
[0133]
为了具有足够量的光,照射一般是脉冲化的,并且使摄像头的检测器(由光学器件im和检测设备10组成)与该发射同步。连接至激光源和检测设备的处理单元ut1确保同步。
[0134]
在检测器具有长整合(integration)时间时,场景的所有对象被成像到检测器上。特定的波长的使用使得例如通过对可见光散射但不对照射光散射的元件对场景成像或者对夜景成像成为了可能。
[0135]
在tof(飞行时间)类型设备中,必须使照射脉冲化,并且为检测器提供与发射同步的快门(有可能是电子的)。产生激光脉冲的时刻与摄像头打开(并且因此闭合)的时刻之间的时间(时间窗口)确定所观察的距离。取决于发射和接收之间的延迟,有可能对空间的精确区段成像。
[0136]
根据另一方面,本发明还涉及相干激光雷达成像系统30,如图13中所示。该激光雷达具有fmcw类型,并且包括激光源sl,激光源sl被配置为发射具有时间调制光学频率fl的激光辐射l。优选地,该光学频率通过漂移b和持续时间t的周期性斜变来调制,并且激光辐射的相干长度是所要观测的场景与激光雷达之间的最大预定距离zmax的至少两倍。
[0137]
激光雷达30还包括分光/复合光学系统ssr,其包括:
[0138]
‑
分光器光学系统ls,其被设计为将激光辐射l在空间上拆分成被称为参考射束lref的射束和被称为对象射束lo的射束,对象射束被引向所要观测的场景obj,
[0139]
‑
复合光学系统sr,其被设计为使参考射束lref在空间上叠加到被所述场景反射的射束lo,r上,从而形成复合射束lrec。
[0140]
激光雷达30还包括如上文所述的检测设备10以及具有光轴ao的光学成像系统,该光学成像系统通过将由场景反射的射束lo,r聚焦到检测器上而形成图像射束lo,rim(因此,lo,rim是对象射束的被光学器件im聚焦的部分),由此产生场景的图像,由于该场景通常处于无限远处,因而检测器det基本上被放置在光学器件im的焦平面中。
[0141]
分光/复合光学系统ssr和光学成像系统im被配置为使得检测器的每个像素接收图像射束lo,rim的一部分和参考射束lref的一部分,并且这些部分在空间上被相干叠加到每个像素上。
[0142]
相干激光雷达成像系统30还包括至少一个电子处理电路pc,其被配置为针对每个像素p(i,j)计算照射像素的图像射束的部分和参考射束的部分的差拍的频率f(i,j)。
[0143]
最后,激光雷达30包括处理单元ut,其连接至激光源和检测设备的检测器det,并且被配置为根据与每个像素相关联的所计算出的拍频以及激光辐射的经调制光学频率来确定场景的被成像到像素上的点的距离。
[0144]
根据一个优选实施例,每个像素p(i,j)包括其自己的电子处理电路pc(i,j),其被设计为计算与该像素相关联的拍频。因而,所有处理在该像素上局部执行,这意味着每个像素处的高度集成以及足够尺寸的像素。在这种构造中,有可能在“全局式快门”模式下操作,即,所有像素同时被处理。集成度的级在这里被最大化,并且允许将向处理电路的数据传送最小化,并因此达到针对距离图像的高速率。
[0145]
根据另一实施例,处理是按行执行的,或者是“卷帘式快门”类型的处理。为此,每个列i连接至电子处理电路pc(i),其被配置为计算在给定时间上与给定行的每个像素相关联的拍频。这样的架构限制了像素中的集成约束,从而允许其尺寸下降,与此同时在检测器的外围本地执行处理。在这一实施例中,仅在外部单元中执行图像后处理。
[0146]
根据另一种变型,在外部单元中计算每个像素的拍频。
[0147]
因而,一个或多个处理电路位于检测器中和/或外部处理单元中。
[0148]
拍频可以是按照很多种已知方式确定的,例如,经由傅里叶变换或者通过对所检测到的周期的数量进行计数。在这最后一种情况下,ut的处理器被配置为通过计算在光学频率的调制的持续时间t内检测到的周期te的数量n而根据表示计数的信号来确定场景的与像素pi相关联的点的距离z。
[0149]
在本发明中,必须防止由反射射束的被检测部分lo,r,i和参考射束的被检测部分lref,i在每个照射像素pi内的相干叠加所导致的干涉条纹的存在。具体地,这样的条纹将引起由两个部分之间的差拍产生的振荡的衰减,因为像素无差别地整合所有贡献。为了防止出现这些条纹,这两个部分的波前在像素中的每个上必须类似。
[0150]
优选地,分光/复合光学系统ssr被配置为将参考射束从激光源相干地传送至与光学成像系统im的光轴ao垂直的中间图像平面pi,从而相对于反射射束产生(真实或虚拟)相干参考源。中间平面pi位于接近光学成像系统的位置上,从而在每个照射像素pi上生成淡色条纹,该条纹是通过反射射束的被检测部分lo,r,i和参考射束的被检测部分lref,i之间的干涉获得的。这一淡色条件意味着在每个像素pi上,反射射束的部分lo,r,i的传播轴与参考射束的部分lref,i的传播轴共线或者基本上共线。在对象射束和参考射束在每个像素pi的级上基本上是平面波的情况下,如果这两个波的传播方向形成了角度θ,则传感器上的条纹的间距为λ/2sinθ,这种条件下使每像素具有至少一个干涉条纹(淡色)的条件是由θ<λ/(2dpix)给出的,其中,dpix是像素尺寸,即例如,对于λ=1300nm和dpix=5μm,θ<7
°
。
[0151]
因此,分光/复合光学系统ssr被配置为在中间图像平面pi中形成参考射束的真实或虚拟中间图像ps,平面pi被布置为在每个照射像素上生成通过所述部分之间的干涉获得的淡色条纹。在截至本技术的提交日期尚未公布的文档fr 2000408中描述了这种类型的激光雷达的一些特征和架构。
[0152]
图14示出了根据本发明的检测设备10的示意性垂直截面和水平截面,并且根据本发明的激光雷达30示出了偏转元件对散斑场的影响,左侧的部分a是致动前,并且右侧的部分b是致动后。设备10被参考射束和来自场景的图像射束同时照射。耦合区的平面中的散斑粒是随机分布的,并且散斑粒中的一些落在了耦合区外。
[0153]
与来自场景的射束不同,参考射束未被标记有散斑,因为其未与粗糙表面发生相互作用。其大致均匀地照射偏转元件的矩阵阵列,偏转元件将其变换成光电探测器的表面处的或者耦合区的矩阵阵列的表面处的光斑分布。参考射束lref在像素中的光电探测器的或者耦合区的这一平面p0中的截面由sref表示,散斑粒sg的截面由s
g
表示,耦合区cz的截面由sc表示,并且光电探测器的截面对应于sph。下文的解释解决了存在一个耦合区的情况,但是在没有耦合区的情况下仍然适用,其方式是以区域sph(或者对于光电二极管不与硅的上表面平齐的bsi情况而言的在半导体的上界面处的电荷收集区的截面的区域)代替截面sc。
[0154]
参考射束lref一般也受偏转元件的致动影响,并且可以从耦合区移开。然而,图像射束和参考射束在耦合区的表面处的移动/变化一般是不同的,因为它们的几何形状在偏转元件的输入处是不同的。在实践中,反馈环在聚焦射束中的每个的定位中达成权衡(其还取决于像素中的每个中的两个射束的相对强度),从而获得成像器中的每个像素上的ac信
号的最佳值。在偏转元件空闲(仍将被致动)时,参考射束和来自场景的射束在耦合区的平面p0中形成光斑。这里使用参考射束居中位于耦合区上的情况。在图14的部分a的像素p1和p2中,场景射束的散斑粒sg具有与参考射束和与耦合区的小的相交,该相交由区域oz限定,其被定义为三个截面之间的相交区:
[0155]
oz=sref∩sc∩s
g
。
[0156]
像素p3是一种特殊情况,其中,散斑粒最初居中位于耦合区上。
[0157]
干涉发生在两个射束之间的相交区中,并且只有该区的包括在耦合区中的部分允许生成被光感受器检测到的震荡信号。对于两个像素p1和p2而言,ac信号因此具有低幅值。
[0158]
之后,偏转元件必须被定向,从而增加三个区域sref、sc、s
g
的相交,由此使ac信号最大化,如部分b中所示,并且针对所有像素获得优化区域oz。
[0159]
在图15中回忆了到达光感受器的光子通量,并且可以将其写作下述形式:
[0160][0161]
f
dc
是dc分量,并且f
ac
是在频率上被调制的幅值分量:
[0162][0163]
其中,z是寻求的距离,并且c是光速。
[0164]
其采取以下假设:
[0165]
考虑fmcw成像系统,其中,激光器的光学频率调制是具有幅值b和周期t的周期性线性斜变,
[0166]
为了简单起见,对于注入电流被调制的半导体激光器而言一般与光学频率调制伴生的激光器的强度调制被忽略,
[0167]
假设两个射束的强度在其各自的截面sref和s
g
内是恒定的。
[0168]
通过执行干涉计算,表明振荡的幅值f
ac
与下述量成比例:
[0169][0170]
其为可以在0和1之间变化的无单位函数。有可能在图16中所示的三个简单的示意性示例中示出其对f
ac
的影响,其中,各射束具有强度和等于耦合区的截面:
[0171]
情况a:射束具有非零叠加,但是不在耦合区中相交,因此:
[0172]
并且f
ac
=0。
[0173]
未测量到被调制的信号,并且因此不可能测量到差拍的频率。
[0174]
情况b:射束优选地被相互叠加并且与耦合区叠加,因此:
[0175][0176]
其使f
ac
的幅值最大化。
[0177]
情况c:射束在其面积的四分之一上叠加,并且这一相交位于耦合区中,在这种情况下:
[0178]
[0179]
并且f
ac
处于通过情况b表示的潜在可达到的最大幅值的四分之一的水平。
[0180]
因而,通过借助于偏转元件de使三个区域的相交最大化,并由此优化被光感受器检测到的ac信号的幅值,这极大地促进了对振荡的频率的测量(图17中所示),例如,该测量借助于使用比较器对峰值计数的方法。
[0181]
根据本发明的fmcw激光雷达成像系统具有如下性质:
[0182]
‑
与大量的像素兼容,从而提供高分辨率图像,
[0183]
‑
快速,其并行地测量场景的点,
[0184]
‑
将处理电子部件的至少部分集成到成像器的级上,理想地集成到每个像素中,这样做减少了从成像器流向外部处理器的数据,并且如果可能的话意味着任何距离数据不被发送到成像器外,
[0185]
‑
高性能,其具有良好的外差效率和小的耦合区(或者小的光敏表面),以限制散斑的影响(其重要性随着光学成像系统的孔径尺寸的增大而提高,从而能够测量相对不反射的对象或者那些相对较远的对象)。
[0186]
在文档fr200408中还描述了根据本发明的激光雷达30的不同架构,下文进行回忆。图18和图19示出了第一种激光雷达变型(集成光学器件),并且图20示出了第二种变型(自由空间中间光学器件)。
[0187]
图18呈现了本发明的激光雷达的第一种变型的第一实施例,其中,分光器光学系统ls包括第一集成光电路oi1,以缩小设备的垂直块。激光辐射l被耦合在使用具有比集成光电路的基板高的折射率的材料制作的波导中。第一集成光电路oi1包括多个波导,每个波导包括至少一个被称为对象光栅的衍射光栅,其拆分出两个路径,即参考路径/对象路径。具体地,对象光栅被设计为从波导提取出的光的部分(或者更一般地提取到光电路oi1的平面之外),从而形成对象射束,另一部分通过至少一个波导继续其传播,并且形成参考射束l
ref
。根据一个选项,使用多个衍射光栅,其将改善均匀性或者允许调整对象射束的波前,其前提是满足不同光栅之间的相位条件。根据另一个选项,第一集成光电路包括单个波导上的单个衍射光栅。
[0188]
根据仍然如图18中所示的一个实施例,提供光学投影系统proj,以将光投射到所要观测的场景的预定区上,接下来该区的图像将被形成到检测器上,因此其通常为矩形区。优选地,光学投影系统以具有基本上等于光学成像系统的视场角(由其焦距和成像器的尺寸确定)的孔径角的锥形来照射场景。因而,无论场景的距离如何,其图像对应于成像器的尺寸。
[0189]
此外,光学投影系统优选被设计为均匀地照射场景的预定区,从而接下来在场景是郎伯的情况下确保在检测器上均匀的照射和信噪比。基本上均匀在这里意味着,场景的预定区上的发光强度的标准偏差例如低于平均发光强度的25%。根据一个实施例,光学投影系统proj包括具有两个级的常规光学系统,这两个级包括第一准直透镜lp1和第二透镜lp2,第二透镜将第一透镜的图像形成到场景上(例如,第一透镜大致位于第二透镜的物焦点处,从而处理源在几乎无限远处的场景上的图像)。激光源sl位于准直透镜lp1的物焦点处。在图18的实施例中,透镜的系统是折叠的,以缩小投影系统的垂直块,并因此包括两个处于45
°
的反射镜mi1和mi2。
[0190]
图18还示出了一个实施例,其中,激光雷达30包括布置在投影系统之后的成形光
学设备doe(衍射光学元件),从而允许改善这一照射的均匀性,该成形光学设备由具有约为激光辐射的波长的周期的周期性图案组成。替代性地,根据另一实施例,可以省略成形光学设备,并且可以采用投影系统proj代替它。在本发明的所有实施例中,可以将投影系统和成形光学系统单独使用或者组合使用。
[0191]
图18还示出了根据本发明的一个实施例的复合光学系统sr的示意图。在这一实施例中,复合光学系统包括被称为第二集成光电路的集成光电路oi2,以缩小设备的垂直块。参考射束l
ref
通过光学元件fo耦合到第二集成光电路中。第二集成电路包括至少一个波导,其包括至少一个被称为参考光栅rr的衍射光栅,衍射光栅允许提取出通过光学成像系统im的至少一部分的检测器的方向上的光。参考光栅允许在接近光学成像系统的参考路径上生成构成中间图像ps的等价点源。因而,第二集成光电路被布置在中间图像平面pi中,从而使参考光栅形成(即,构成)中间图像ps。
[0192]
根据图18的复合光学系统的一个实施例,参考光栅是高对比度光栅(hcg)类型的光栅,其允许优先地在波导的一侧(在图18中,朝向光学成像系统)光的解耦。缩小光栅的横向尺寸(大约是激光辐射的几个波长),从而允许来自参考光栅的参考射束的适当发散和光瞳的宽范围照射,从而照射整个检测器。就对象路径而言,相对不受向光的路径中插入波导和光栅的影响。波导不位于图像传感器的共轭平面中,因此不影响图像在传感器上的形成。在其位于光学成像系统内部的情况下,在上面制造波导的基板可以被插入到光学成像系统im的两个透镜之间,此时这一系统包括至少两个透镜。
[0193]
在另一种变型中,通过多个参考衍射光栅使参考路径与对象路径复合。根据这种变型,参考光栅之间存在相位关系,使得它们被设计为在检测器的像素处建立波前,该波前中的每个点处的正切相对于对象射束的波前的正切形成不大于的角度。为此,光电路oi2的波导是单模波导。根据一个实施例,电路oi2包括波导中的或者参考光栅的输出处的移相器。每个衍射光栅表现出类似于二次源的作用。光栅规律地排列(优选具有相同周期),从而形成了行和列的矩阵阵列。优选地,被光栅的阵列衍射的光形成了在设备10的平面中被规律地隔开的光图案,其中,每像素一个图案主题。具有多个参考光栅的优点在于使得下述内容成为了可能:使光图案更好地分布,通过二次点源更好地控制对检测器的照射的均匀性,以及在检测器det上相对于对象射束的波前更好地调整参考射束的波前。由于光栅的折射率和为光栅提供的波导的折射率的对比度保持为低,并且由于光栅未被成像到检测器上,因而对象路径在传输时不受或者几乎不受穿过这些光栅的影响。
[0194]
替代性地,根据另一个实施例,使用包括在波导中的具有相对于波导中的传播轴成45
°
角的定向的半镀银反射镜,被引导的参考射束被朝向光学成像系统解耦到自由空间中。采用光栅的实施例的优点在于,其相对于采用半镀银反射镜的实施例,减少了参考路径的通量损失。
[0195]
图18的复合系统允许缩小设备的总厚度,因为其采用简单的具有毫米左右或者更小的厚度的基板代替了大块微光学部件(例如,半镀银反射镜,其垂直块大致等于光学成像系统的入射光瞳的直径)。如图18中所示的分光光学系统的实施例和复合光学系统的实施例也可以单独使用。
[0196]
图18还示出了一个实施例,其中,将l
ref
耦合到第二集成光电路中是通过光纤fo执
行的。这一光纤被设计为将参考射束从第一集成光电路oi1引导至第二集成光电路oi2。两个集成光电路的使用允许缩小设备的垂直块。
[0197]
图19呈现了符合根据本发明的第一种激光雷达变型的第二实施例的成像设备。这一第二实施例接近图18的实施例,只是图18的设备的第一集成光电路oi1和第二集成光电路oi2现在只形成了一个被称为第三集成光电路oi3的集成光电路,此时该集成光电路包括分光器光学系统ls和所述复合光学系统sr。在这一实施例中,该分光/复合光学系统因此包括第三集成光电路oi3,激光辐射l被耦合到集成光电路中。集成光电路的被称为参考波导gr的至少一个波导将参考射束l
ref
引导朝向包括在位于参考波导上的至少一个参考光栅rr处的复合系统sr。第三集成光电路oi3被布置在中间图像平面中,从而使参考光栅形成中间图像ps。在图19的示例中,作为非限制性说明,该复合光学系统包括多个参考光栅。替代性地,根据另一实施例,该复合光学系统包括单个参考光栅。
[0198]
这一实施例的优点在于避免由图18的设备的光纤fo中的参考射束耦合/解耦引起的通量损失。此外,这种布置允许降低系统的复杂性并缩小系统的块。
[0199]
图19还示出了一个实施例,其中,激光雷达包括带通光学滤波器f,其被放置在设备10的前面或者检测器的每个像素(被提供为测量距离)的前面(例如,在采集rgb
‑
z类型的图像的情况下),并且以激光器的发射波长为中心,从而滤除环境杂散光的大部分。
[0200]
图20呈现了根据本发明的第二种变型的激光雷达30的示意图。在这一第二种变型中,分光/复合系统ssr还包括中间光学系统si,其布置在分光器光学系统ls之后并且布置在复合光学系统sr之前。这一中间光学系统si被设计为聚焦参考射束,并且在中间平面pi中形成中间图像ps。根据一个实施例,这一中间光学系统是透镜或者一组透镜和光学漫射器。更具体地,中间光学系统允许通过使参考射束l
ref
朝光学成像系统会聚而使参考射束成形,使得参考射束照射设备10的整个检测器det(与偏转元件的矩阵阵列相组合,偏转元件的矩阵阵列基本上不修改参考射束的路径),并且使得每个像素处的对象路径的波前和参考路径的波前类似。因而,在这一实施例中,分光器光学系统和复合光学系统可以是立方体分光器或者平板分光器。在图20的实施例中,与图18的实施例的组件类似的组件(由光学投影系统proj和成形光学元件doe形成)允许基本上均匀地照射场景的预定区。
[0201]
替代性地,根据这一第二种变型的另一实施例,由光学投影系统proj和成形光学元件doe形成的组件在对象射束的路径上被放置在分光器光学系统的下游。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。