技术特征:
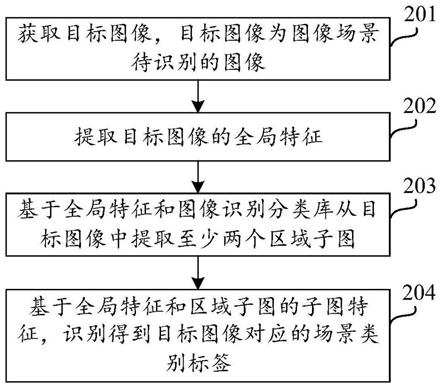
1.一种图像场景的识别方法,其特征在于,所述方法包括:获取目标图像,所述目标图像为图像场景待识别的图像;提取所述目标图像的全局特征,所述全局特征是对所述目标图像整体进行特征提取得到的特征;基于所述全局特征和图像识别分类库从所述目标图像中提取至少两个区域子图,所述图像识别分类库中包括用于对图像进行标注的场景类别标签;基于所述全局特征和所述区域子图的子图特征,识别得到所述目标图像对应的场景类别标签。2.根据权利要求1所述的方法,其特征在于,所述基于所述全局特征和图像识别分类库从所述目标图像中提取至少两个区域子图,包括:基于所述全局特征和所述图像识别分类库,对所述全局特征中的特征点进行识别,得到所述特征点对应的候选点得分;基于所述候选点得分确定所述目标图像中的候选子图的置信度,所述候选子图与所述特征点之间存在映射关系;基于所述置信度从所述目标图像的候选子图中确定出所述至少两个区域子图。3.根据权利要求2所述的方法,其特征在于,所述基于所述置信度从所述目标图像的候选子图中确定出所述至少两个区域子图,包括:基于所述置信度对所述目标图像的候选子图进行按序排列;从按序排列的所述候选子图中确定指定子图,所述指定子图为所述候选子图中符合指定要求的子图;基于所述指定子图与所述候选子图之间的重叠关系,从所述候选子图中确定出要求子图,所述要求子图为与所述指定子图的重叠关系符合重叠关系要求的子图;基于所述要求子图和所述指定子图确定所述至少两个区域子图。4.根据权利要求3所述的方法,其特征在于,所述从按序排列的所述候选子图中确定指定子图,包括:从按序排列的所述候选子图中,将置信度数值取值最高的候选子图确定为所述指定子图。5.根据权利要求3所述的方法,其特征在于,所述基于所述指定子图与所述候选子图之间的重叠关系,从所述候选子图中确定出要求子图,包括:确定所述指定子图与所述候选子图之间的重叠率;响应于所述指定子图与所述候选子图之间的重叠率达到重叠率阈值,将所述候选子图保留并确定为所述要求子图;响应于所述指定子图与所述候选子图之间的重叠率小于所述重叠率阈值,舍弃所述候选子图。6.根据权利要求1至5任一所述的方法,其特征在于,所述基于所述全局特征和所述区域子图的子图特征,识别得到所述目标图像对应的场景类别标签,包括:提取所述至少两个区域子图的所述子图特征;将所述子图特征与所述全局特征合并,得到融合特征;对所述融合特征进行场景识别,得到所述目标图像对应的场景类别标签。
7.根据权利要求1至5任一所述的方法,其特征在于,所述方法应用于场景识别模型中,所述目标图像为标注有样本类别标签的样本图像;所述方法还包括:通过所述场景识别模型识别得到所述全局特征和所述区域子图的子图特征对应的图像预测结果;基于所述图像预测结果和所述样本类别标签,得到所述图像预测结果的损失值;基于所述图像预测结果的损失值对所述场景识别模型进行参数调整。8.根据权利要求7所述的方法,其特征在于,所述通过所述场景识别模型识别得到所述全局特征和所述区域子图的子图特征对应的图像预测结果,包括:通过所述场景识别模型对所述全局特征进行全局特征预测,得到全局预测结果;通过所述场景识别模型对所述子图特征与所述全局特征合并的融合特征进行注意力分类预测,得到所述目标图像对应的场景类别标签作为注意力预测结果;通过所述场景识别模型对所述至少两个区域子图的子图特征进行定位准确率预测,得到定位预测结果;通过所述场景识别模型对所述至少两个区域子图的子图特征进行分类预测,得到子图预测结果。9.根据权利要求8所述的方法,其特征在于,所述基于所述图像预测结果和所述样本类别标签,得到所述图像预测结果的损失值,包括:基于所述全局预测结果和所述样本类别标签得到第一损失值;基于所述注意力预测结果和所述样本类别标签得到第二损失值;基于所述定位预测结果和所述样本类别标签得到第三损失值;基于所述子图预测结果和所述样本类别标签得到第四损失值;基于所述第一损失值、所述第二损失值、所述第三损失值和所述第四损失值得到所述图像预测结果的损失值。10.一种图像场景的识别装置,其特征在于,所述装置包括:获取模块,用于获取目标图像,所述目标图像为图像场景待识别的图像;提取模块,用于提取所述目标图像的全局特征,所述全局特征是对所述目标图像整体进行特征提取得到的特征;所述提取模块,还用于基于所述全局特征和图像识别分类库从所述目标图像中提取至少两个区域子图,所述图像识别分类库中包括用于对图像进行标注的场景类别标签;识别模块,用于基于所述全局特征和所述区域子图的子图特征,识别得到所述目标图像对应的场景类别标签。11.根据权利要求10所述的装置,其特征在于,所述识别模块,还用于基于所述全局特征和所述图像识别分类库,对所述全局特征中的特征点进行识别,得到所述特征点对应的候选点得分;所述提取模块,包括:确定单元,用于基于所述候选点得分确定所述目标图像中的候选子图的置信度,所述候选子图与所述特征点之间存在映射关系;所述确定单元,还用于基于所述置信度从所述目标图像的候选子图中确定出所述至少
两个区域子图。12.根据权利要求11所述的装置,其特征在于,所述提取模块,还包括:排序单元,用于基于所述置信度对所述目标图像的候选子图进行按序排列;所述确定单元,还用于从按序排列的所述候选子图中确定指定子图,所述指定子图为所述候选子图中符合指定要求的子图;所述确定单元,还用于基于所述指定子图与所述候选子图之间的重叠关系,从所述候选子图中确定出要求子图,所述要求子图为与所述指定子图的重叠关系符合重叠关系要求的子图;所述确定单元,还用于基于所述要求子图和所述指定子图确定所述至少两个区域子图。13.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一段程序,所述至少一段程序由所述处理器加载并执行以实现如权利要求1至9任一所述的图像场景的识别方法。14.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一段程序,所述至少一段程序由处理器加载并执行以实现如权利要求1至9任一所述的图像场景的识别方法。
技术总结
本申请公开了一种图像场景的识别方法、装置、设备及可读存储介质,涉及机器学习领域。该方法包括:获取目标图像;提取目标图像的全局特征;基于全局特征和图像识别分类库从目标图像中提取至少两个区域子图;基于全局特征和区域子图的子图特征,识别得到目标图像对应的场景类别标签。针对目标图像的场景识别过程,提取目标图像的全局特征后,基于全局特征从目标图像中采用注意力机制提取区域子图,从而基于子图特征和全局特征对目标图像进行场景识别,也即,场景识别的参考内容中不仅仅包括目标图像中的单个实体,而是包括了目标图像中与图像识别分类库中各个场景类别标签相关的图像区域,从而提高了目标图像的场景识别准确率。从而提高了目标图像的场景识别准确率。从而提高了目标图像的场景识别准确率。
技术研发人员:郭卉
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:2021.02.26
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。