1.本实用新型属于无人机领域,具体涉及一种飞行姿态可调整的无人机。
背景技术:
2.无人机驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主操作。
3.现有的无人机飞行姿态难以调整,导致无人机在飞行过程中姿态出现误差而得不到实时调整,严重影响无人机的远程操控和测绘效果。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目在于提供一种飞行姿态可调整的无人机,消除无人机飞行过程中姿态出现的误差,保证无人机的远程操控和测绘效果。
5.为了实现上述目的,本实用新型采用以下技术方案予以实现:
6.一种飞行姿态可调整的无人机,包括机体、沿水平方向安装在机体上的至少一组两个对称动力装置以及安装在每个动力装置下方且用于对应动力装置发生偏转的偏转装置;
7.所述每个动力装置均包括与机体侧壁固定连接的固定板、固定连接在固定板上的轴套、穿设在轴套内且与轴套转动连接的销轴、固定连接在销轴上的偏转板、安装在偏转板上的电机、安装在电机输出轴上的叶片;
8.所述每个偏转装置均包括固定安装在对应固定板下方的l形板、安装在l形板水平部上的套筒、固定安装在套筒内部的第一电磁铁、滑动连接在套筒内部且位于第一电磁上方的第二电磁铁、安装在第二电磁铁顶部且延伸至套筒外部的升降杆、安装在套筒顶部内且位于第二电磁铁上方的铁环;
9.所述每个升降杆均通过铰座与对应的偏转板铰接;所述偏转板上开设有用于轴套穿过的孔;所述每个第一电磁铁与对应第二电磁铁的异性磁极均相对设置;所述每组铰座、升降杆、第一电磁铁以及第二电磁铁的高度之和均与对应l形板的竖直部高度相等。
10.进一步地,所述每个套筒均由铝合金制成。
11.进一步地,所述两个对称动力装置设置两组。
12.进一步地,所述机体的底部安装有多个缓冲底座。
13.进一步地,所述每个缓冲底座均包括与机体固定连接的缓冲杆和套设在缓冲杆上的底壳;
14.所述每个缓冲杆的底部均通过弹簧与对应的底壳连接;所述每个底壳内均安装有与对应缓冲杆相贴合的多个缓冲球。
15.进一步地,所述每个缓冲杆均呈圆台形。
16.进一步地,所述缓冲球由橡胶制成。
17.进一步地,所述机体的底部安装有摄像头。
18.本实用新型与现有技术相比,具有如下技术效果:
19.1)本实用新型无人机常态飞行时动力装置处于水平状态,第一电磁铁和第二电磁铁均处于通电状态,使得第一电磁铁和第二电磁铁之间通过磁力吸附在一起,进而使得偏转板处于水平状态;当需要调整机体的飞行姿态时,将第一电磁铁断电,第二电磁铁通电,此时第二电磁铁与第一电磁铁分离且通过磁力吸附在铁环上,第二电磁铁吸附在铁环过程中带动升降杆移动,升降杆移动带动铰座移动,通过铰座带动偏转板转动,偏转板转动带动销轴绕着轴套旋转,偏转板转动带动电机和叶片转动进而改变机体的飞行姿态;消除无人机飞行过程中姿态出现的误差,保证无人机的远程操控和测绘效果;
20.2)本实用新型通过每组铰座、升降杆、第一电磁铁以及第二电磁铁的高度之和均与对应l形板的竖直部高度相等,使得无人机常态飞行时偏转板处于水平状态;
21.进一步地,本实用新型通过套筒设置为铝合金套筒,保证第一电磁铁和第二电磁铁与套筒之间不会存在磁力作用,同时减轻无人机的重量;
22.进一步地,本实用新型通过设置两组动力装置增强无人机的飞行动力;
23.进一步地,本实用新型的无人机在降落时,通过多个缓冲座对机体起到缓冲作用,更好的保护机体,保证机体的使用寿命;
24.进一步地,本实用新型的无人机需要降落时,底壳接触地面,机体带动缓冲杆下落,缓冲杆下落挤压缓冲球,使缓冲球发生形变起到一级缓冲作用,缓冲杆下落挤压弹簧使弹簧发生形变起到二级缓冲作用,减少地面对机体的冲击,使得机体得到更好的防护。
附图说明
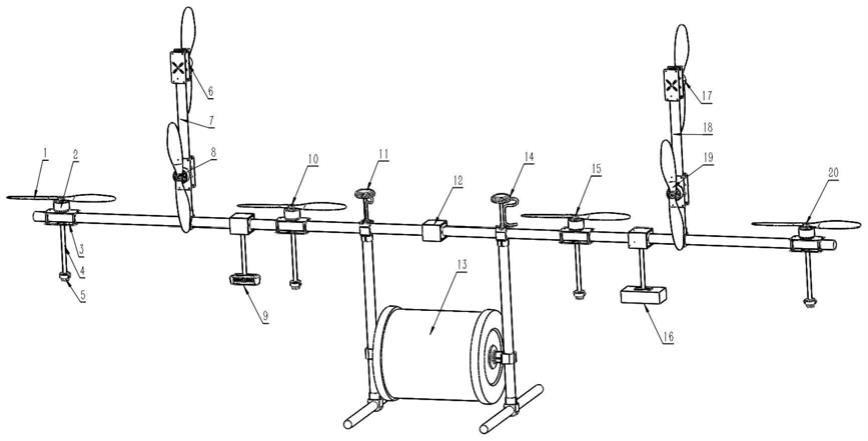
25.图1为本实用新型常态飞行的结构示意图;
26.图2为本实用新型图1的俯视图;
27.图3为本实用新型图1中a区域的放大图;
28.图4为本实用新型图1中b区域的放大图;
29.图5为本实用新型飞行姿态调整状态的结构示意图;
30.图6为本实用新型图5中c区域的放大图;
31.图中:1
‑
机体,2
‑
动力装置;201
‑
固定板,202
‑
轴套,203
‑
销轴,204
‑
偏转板,205
‑
电机,206
‑
叶片,3
‑
偏转装置;301
‑
l形板,302
‑
套筒,303
‑
第一电磁铁,304
‑
第二电磁铁,305
‑
升降杆,306
‑
铁环,307
‑
铰座,4
‑
摄像头,5
‑
缓冲底座;501
‑
底壳,502
‑
缓冲杆,503
‑
弹簧,504
‑
缓冲球。
具体实施方式
32.以下结合实施例对本实用新型的具体内容做进一步详细解释说明。
33.如图1和图2所示,本发明提供一种飞行姿态可调整的无人机,包括机体1,机体1上沿水平方向安装有两组对称的动力装置2,每个动力装置均包括与机体1侧壁焊接的固定板201,固定板201上焊接有的轴套202,轴套202内穿设有与轴套202转动连接的销轴203,销轴203上焊接有偏转板204,偏转板204上开设有轴套202穿过的孔,偏转板204上通过螺栓固定有与孔错开的电机205,电机205的输出轴上安装有叶片206。
34.参照图1和图3,每个动力装置2上均安装有用于对应动力装置2发生偏转的偏转装
置3,每个偏转装置3均包括安装在对应固定板201底部的l形板301,l形板301的竖直部与固定板201焊接,l形板301的水平部上焊接有铝合金套筒302,套筒302内通过螺栓固定有第一电磁铁303,第一电磁铁303的上方贴合有第二电磁铁304,第二电磁铁304的侧壁与套筒302相接触,第二电磁铁304的顶部延伸至套筒302外部焊接有升降杆305,升降杆305通过铰座307与对应的偏转板204底部铰接,铰座307通过螺栓与偏转板204底部固定;套筒302的顶部内壁上通过螺栓固定有铁环306。
35.其中,第一电磁铁303与对应第二电磁铁304的异性磁极相对设置;每组铰座307、升降杆305、第一电磁铁303、第二电磁铁304的高度之和均与l形板301的竖直部高度相等,使得无人机常态飞行时偏转板204处于水平状态。
36.参照图1和图4,机体1的底部安装有多个缓冲底座5,每个缓冲底座5均包括与机体1焊接的圆台形缓冲杆502和套设在缓冲杆502上的底壳501。
37.每个缓冲杆502的底部均通过弹簧503与对应的底壳501连接,弹簧503的顶部与缓冲杆502焊接,底部与底壳501焊接;每个底壳501内均安装有与对应缓冲杆502相贴合的多个橡胶制成的缓冲球504。
38.机体1的底部中心安装有摄像头4。
39.工作原理:无人机常态飞行时动力装置2处于水平状态,第一电磁铁303和第二电磁铁304均处于通电状态,使得第一电磁铁303和第二电磁铁304之间通过磁力吸附在一起,进而使得偏转板204处于水平状态;当需要调整机体1的飞行姿态时,可以将机体1左侧或者右侧的两个动力装置2偏转(参照图5和图6),首先将第一电磁铁303断电,第二电磁铁304通电,此时第二电磁铁304与第一电磁铁303分离且通过磁力吸附在铁环306上,第二电磁铁304吸附在铁环306过程中带动升降杆305移动,升降杆305移动带动铰座307移动,通过铰座307带动偏转板204转动,偏转板204转动带动销轴203绕着轴套202旋转,偏转板204转动带动电机205和叶片206转动进而改变机体1的飞行姿态;消除无人机飞行过程中姿态出现的误差,保证无人机的远程操控和测绘效果。
40.当无人机需要降落时,底壳501接触地面,机体1带动缓冲杆502下落,缓冲杆502下落挤压缓冲球504,使缓冲球504发生形变起到一级缓冲作用,缓冲杆502下落挤压弹簧503使弹簧503发生形变起到二级缓冲作用,减少地面对机体1的冲击,使得机体1得到更好的防护,保证机体1的使用寿命。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。