1.本实用新型涉及桌椅技术领域,尤其是涉及一种防久坐的智能电动桌椅。
背景技术:
2.随着社会的发展,人们生活水平的不断提高,健康生活逐渐成为人们生活和工作的重心。人们往往在办公、学习和娱乐时都是在桌椅上度过的;而长时间倚坐容易引起亚健康,为防止亚健康,往往在坐一段时间后需站立活动,为提醒人们久坐后活动休息,现有技术中往往在桌椅上安装传感器或人体穿戴传感器来感应人们久坐时间,从而通过振动、声响的方式提醒人们休息和活动,而仅仅通过振动和声响的方式提醒很容易被人们忽视,并无法真正的起到防久坐,因此有必要予以改进。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种防久坐的智能电动桌椅,能够强制提醒,防止使用者过度久坐。
4.为了实现上述目的,本实用新型所采用的技术方案是:一种防久坐的智能电动桌椅,包括升降桌、调节椅、桌椅连接机构以及分别与升降桌、调节椅、桌椅连接机构电性连接的控制机构,桌椅连接机构的前端连接升降桌,桌椅连接机构的后端连接调节椅,升降桌包括桌面、安装于桌面的下表面的伸缩支腿以及用于驱动伸缩支腿伸缩的升降驱动机构,调节椅包括座椅、安装于座椅下表面的座椅升降支脚、距离调节机构以及安装在座椅内部的用于检测椅坐时间的久坐传感器,久坐传感器与控制机构电性连接,距离调节机构固定安装于座椅升降支脚的底面,距离调节机构与桌椅连接机构滑动连接。
5.进一步的技术方案中,伸缩支腿包括左伸缩支脚、右伸缩支脚和连接杆,左伸缩支脚和右伸缩支脚分别安装在桌面的下表面的左右两侧,连接杆安装于左伸缩支脚和右伸缩支脚之间,升降驱动机构安装于连接杆的内部。
6.进一步的技术方案中,升降驱动机构包括有用于带动伸缩支腿伸缩的螺旋升降机以及用于驱动螺旋升降机的支脚驱动电机,支脚驱动电机与控制机构电性连接。
7.进一步的技术方案中,左伸缩支脚和右伸缩支脚的内部分别设置有螺旋升降机,升降驱动机构还包括有联动杆和传动装置,联动杆的左右两端分别传动连接两个螺旋升降机的动力输入端,支脚驱动电机通过连接于支脚驱动电机与联轴杆之间的传动装置带动联轴杆转动。
8.进一步的技术方案中,螺旋升降机包括升降丝杆和套设于升降丝杆上的升降螺纹套,左伸缩支脚和右伸缩支脚分别设置有伸缩支撑管和连接于伸缩支撑管下端的支撑地脚,支撑地脚的上部具有一滑动杆,滑动杆插入伸缩支撑管并与伸缩支撑管滑动连接,升降螺纹套固定安装于滑动杆的内部,升降丝杆和升降螺纹套螺纹配合。
9.进一步的技术方案中,桌椅连接机构包括滑轨、滑动连接于滑轨的横向滑块以及距离调节丝杆,滑轨横向安装于伸缩支腿的底部,滑轨的内部安装有横向调节丝杆,横向滑
块开设有贯穿两侧的滑块螺纹孔,横向调节丝杆套设于滑块螺纹孔,横向调节丝杆的端部设置有横向驱动机构,横向驱动机构传动连接于横向调节丝杆,控制机构与横向驱动机构电性连接,滑轨与调节椅的相对面开设有滑槽,横向滑块穿过滑槽与滑轨滑动连接,距离调节丝杆的前端连接于横向滑块,距离调节丝杆的后端连接于距离调节机构,座椅升降支脚的下方安装有若干万向轮。
10.进一步的技术方案中,距离调节机构包括调节壳体、安装于调节壳体内部的距离调节电机和调节齿轮套,调节壳体安装于座椅升降支脚的底部,调节齿轮套套设于距离调节丝杆上并与距离调节丝杆传动连接,距离调节电机与调节齿轮套传动连接,以实现距离调节电机驱动调节齿轮套在距离调节丝杆上滑动。
11.进一步的技术方案中,升降桌还包括显示器固定机构,显示器固定机构包括显示轨道和显示升降支架,显示轨道固定安装于桌面的顶面,显示轨道的内部还设置有显示丝杆和传动连接于显示丝杆端部的显示驱动电机,显示升降架的下部套设于显示丝杆上,并与显示滑轨滑动配合,显示驱动电机电性连接于控制机构,以实现控制显示升降架横向移动。
12.进一步的技术方案中,桌面的内部还设置有用于检测人体站立时间的桌面传感器,桌面传感器与控制机构电性连接。
13.采用上述结构后,本实用新型和现有技术相比所具有的优点是:久坐传感器检测人体已经久坐后,通过控制机构驱动调节椅远离升降桌、驱动升降桌向上升高,迫使使用者站立或休息,保护了使用者的人体健康,且升降桌可上下升降,使用者可站立或坐下交替使用,调节椅可电动调节与升降桌之间的距离和左右移动,提高了使用便利性。
附图说明
14.下面结合附图和实施例对本实用新型进一步说明。
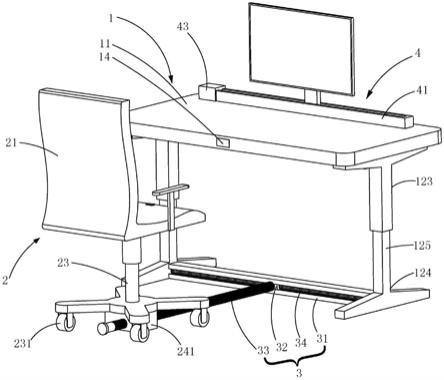
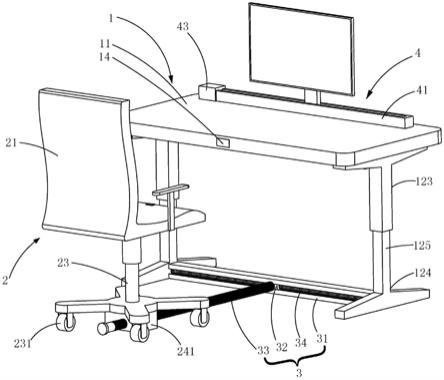
15.图1是本实用新型的结构示意图;
16.图2是本实用新型的工作状态示意图;
17.图3是本实用新型的休息状态示意图;
18.图4是本实用新型的伸缩支腿的结构示意图;
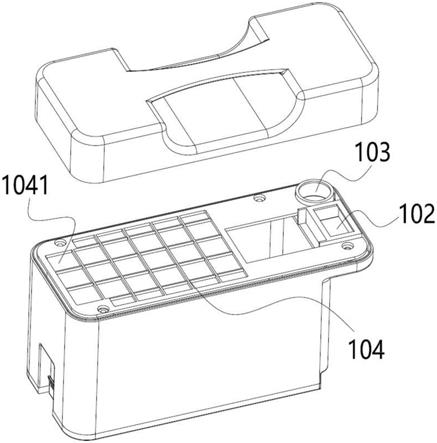
19.图5是本实用新型的距离调节机构的结构示意图。
20.图中:
21.1升降桌、11桌面、121左伸缩支脚、122右伸缩支脚、123伸缩支撑管、124 支撑地脚、125滑动杆、126连接杆、131支脚驱动电机、132联动杆、133传动装置、14桌面传感器;
22.2调节椅、21座椅、23座椅升降支脚、231万向轮、24距离调节机构、241 调节壳体、242距离调节电机、243调节齿轮套、244久坐传感器;
23.3桌椅连接机构、31滑轨、32横向滑块、33距离调节丝杆、34横向调节丝杆;
24.4显示器固定机构、41显示轨道、42显示升降支架、43显示驱动电机。
具体实施方式
25.以下仅为本实用新型的较佳实施例,并不因此而限定本实用新型的保护范围。
26.一种防久坐的智能电动桌椅,如图1至图5所示,一种防久坐的智能电动桌椅,包括
升降桌1、调节椅2、桌椅连接机构3以及分别与升降桌1、调节椅2、桌椅连接机构3电性连接的控制机构,桌椅连接机构3的前端连接升降桌1,桌椅连接机构3的后端连接调节椅2,升降桌1包括桌面11、安装于桌面11的下表面的伸缩支腿以及用于驱动伸缩支腿伸缩的升降驱动机构,调节椅2包括座椅 21、安装于座椅21下表面的座椅升降支脚23、距离调节机构24以及安装在座椅 21内部的用于检测椅坐时间的久坐传感器244,久坐传感器244与控制机构电性连接,距离调节机构24固定安装于座椅升降支脚23的底面,距离调节机构24 与桌椅连接机构3滑动连接。
27.传统的电动桌椅大部分不具备久坐提醒功能,小部分具有久坐提醒功能的均为通知提醒,通知提醒很容易被使用者忽略,而本实用新型通过久坐传感器244 感应到使用者长时间倚坐时,升降驱动机构驱动升降桌1上升,距离调节机构24 调节调节椅2和升降桌1之间的距离,使调节椅2与升降桌1的距离变长;使用者便无法倚坐着在桌面11上办公、学习及娱乐,强制让使用者站立使用桌面11 或进行休息,防止使用者忽略久坐提醒,保护使用者的身体健康。
28.具体地,伸缩支腿包括左伸缩支脚121、右伸缩支脚122和连接杆126,左伸缩支脚121和右伸缩支脚122分别安装在桌面11的下表面的左右两侧,连接杆126安装于左伸缩支脚121和右伸缩支脚122之间,升降驱动机构安装于连接杆126的内部。左伸缩支脚121和右伸缩支脚122呈“工”字形,保证了升降桌 1稳定性的同时,只需两个滑动机构即可进行升降,结构简单成本低。
29.具体地,升降驱动机构包括有用于带动伸缩支腿伸缩的螺旋升降机以及用于驱动螺旋升降机的支脚驱动电机131,支脚驱动电机131与控制机构电性连接。支脚驱动电机131与支脚驱动电机131传动连接。
30.具体地,左伸缩支脚121和右伸缩支脚122的内部分别设置有螺旋升降机,升降驱动机构还包括有联动杆132和传动装置133,联动杆132的左右两端分别传动连接两个螺旋升降机的动力输入端,支脚驱动电机131通过连接于支脚驱动电机131与联轴杆之间的传动装置133带动联轴杆转动。联动杆132传动连接两个螺旋升降机,只需一个支脚驱动电机131即可同时驱动左伸缩支脚121和右伸缩支脚122伸缩,结构简单,成本低。
31.具体地,螺旋升降机包括升降丝杆和套设于升降丝杆上的升降螺纹套,左伸缩支脚121和右伸缩支脚122分别设置有伸缩支撑管123和连接于伸缩支撑管 123下端的支撑地脚124,支撑地脚124的上部具有一滑动杆125,滑动杆125 插入伸缩支撑管123并与伸缩支撑管123滑动连接,升降螺纹套固定安装于滑动杆125的内部,升降丝杆和升降螺纹套螺纹配合。
32.在升降桌1升降时,支脚驱动电机131通过传动装置133进行减速,传动装置133带动联动杆132旋转,联动杆132带动两个升降丝杆同步旋转,升降丝杆在旋转的同时相对于升降螺纹套上下移动,此时滑动杆125在伸缩支撑管123内上下滑动,以实现升降桌1上升或下降。
33.具体地,桌椅连接机构3包括滑轨31、滑动连接于滑轨31的横向滑块32 以及距离调节丝杆33,滑轨31横向安装于伸缩支腿的底部,滑轨31的内部安装有横向调节丝杆34,横向滑块32开设有贯穿两侧的滑块螺纹孔,横向调节丝杆 34套设于滑块螺纹孔,横向调节丝杆34的端部设置有横向驱动机构,横向驱动机构传动连接于横向调节丝杆34,控制机构与
横向驱动机构电性连接,滑轨31 与调节椅2的相对面开设有滑槽,横向滑块32穿过滑槽与滑轨31滑动连接,距离调节丝杆33的前端连接于横向滑块32,距离调节丝杆33的后端连接于距离调节机构24,座椅升降支脚23的下方安装有若干万向轮231。横向滑块32在滑轨 31内滑动,从而使调节椅2能够横向调节,使用更加方便,容易调节到舒适的位置。作为优选地,横向驱动机构驱动横向调节丝杆34旋转,从而带动横向滑块 32横向移动,以实现调节椅2的横向电动调节,使用更加方便。
34.具体地,距离调节机构24包括调节壳体241、安装于调节壳体241内部的距离调节电机242和调节齿轮套243,调节壳体241安装于座椅升降支脚23的底部,调节齿轮套243套设于距离调节丝杆33上并与距离调节丝杆33传动连接,距离调节电机242与调节齿轮套243传动连接,以实现距离调节电机242驱动调节齿轮套243在距离调节丝杆33上滑动。调节距离时,距离调节电机242驱动调节齿轮套243旋转,驱动调节齿轮套243旋转,使调节齿轮套243在距离调节丝杆 33上移动,实现距离调节。
35.如图2和图3所示,智能电动桌椅具有工作状态和休息状态,当久坐传感器 244未达到预设的椅坐时间时智能电动桌椅处于工作状态,当久坐传感器244达到预设的椅坐时间时智能电动桌椅处于休息状态,
36.进入工作状态时,调节椅2与桌面11的距离保持一个适宜坐着使用的距离,桌面11的高度也处于适宜坐着使用的高度;进入休息状态时,桌面11的高度上升至无法坐着使用的高度,调节椅2与桌面11的距离也拉至使用者无法坐着触碰到桌面11的距离,从而强制让使用者站立或休息。
37.具体地,升降桌1还包括显示器固定机构4,显示器固定机构4包括显示轨道41和显示升降支架42,显示轨道41固定安装于桌面11的顶面,显示轨道41 的内部还设置有显示丝杆和传动连接于显示丝杆端部的显示驱动电机43,显示升降架的下部套设于显示丝杆上,并与显示滑轨31滑动配合,显示驱动电机43电性连接于控制机构,以实现控制显示升降架横向移动。显示驱动电机43驱动显示丝杆横向移动,从而实现电动调节显示升降支架42的位置,使用更加便利,可调至舒适的观看位置。作为优选地,智能电动桌椅还具有强制休息状态,当桌面传感器14和久坐传感器244同时检测到使用者已经长时间办公、学习或娱乐后进入强制休息状态,显示升降支架42来回往复移动,让使用者无法正常观看显示器,进一步强制使用者休息,防止使用者继续使用。
38.具体地,桌面11的内部还设置有用于检测人体站立时间的桌面传感器14,桌面传感器14与控制机构电性连接,当桌面传感器14达到预设的站立时间时,智能电动桌椅由休息状态转化为工作状态。当桌面传感器14检测到使用者已经满足休息时间或站立时间后,使智能电动桌椅自动由休息状态转化为工作状态,无需人工手动操作,便捷性更强,且能掌握休息时间或站立时间,防止智能电动桌椅刚进入休息状态就被使用者人工操作进入工作状态,进一步加强了强制性。
39.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。