1.本实用新型涉及清洁设备技术领域,特别是涉及一种清洁机器人。
背景技术:
2.目前,清洁机器人包括主机和前撞组件,前撞组件安装于主机的前端,前撞组件相对于主机可前后移动,而起到碰撞缓冲作用。而且清洁机器人的前端呈圆形,当前撞组件的左右两侧发生碰撞时,前撞组件仍然能起到缓冲作用。然而,当清洁机器人的前端呈方形时,其前撞组件只能对主机的前端起缓冲保护的作用,对主机的侧壁没有起缓冲保护的作用。
技术实现要素:
3.为了解决上述技术问题,本实用新型实施例提供了一种使用方便的清洁机器人。
4.一种清洁机器人,包括:
5.主机;
6.前撞组件,包括前撞本体、自所述前撞本体的两端弯折延伸的侧板,所述前撞本体安装于所述主机的前端,所述侧板延伸至所述主机的侧壁,其中,所述前撞组件可相对于所述主机在前后方向和左右方向上运动,所述前后方向为所述清洁机器人的前进、后退方向,所述左右方向以所述前后方向为基准。
7.可选地,所述前撞本体设置有第一限位槽,所述主机设置有第一限位凸台,所述第一限位凸台卡接于所述第一限位槽,其中,所述第一限位凸台与所述第一限位槽具有余量,以允许所述前撞组件可相对于所述主机在前后方向和左右方向上运动。
8.可选地,所述主机的前端延伸有支撑板,所述第一限位凸台固定于所述支撑板,所述前撞本体承载于所述支撑板,其中,所述前撞本体与所述主机具有余量。
9.可选地,所述主机延伸有第二限位凸台,所述前撞本体设置有第二限位槽,所述第二限位凸台卡接于所述第二限位槽,所述第二限位凸台与所述第二限位槽具有余量;其中,所述第一限位槽位于所述前撞本体的顶端,所述第二限位槽位于所述前撞本体的底端。
10.可选地,所述主机的侧壁设置有限位卡勾,所述侧板设置有卡孔,所述限位卡勾卡接于所述卡孔内,所述限位卡勾与所述卡孔具有余量。
11.可选地,位于所述前撞本体两端的所述侧板分别延伸至所述主机的两相对侧壁;所述主机的两相对侧壁均设置有至少一所述限位卡勾,一所述限位卡勾可活动卡接于一所述侧板的卡孔内。
12.可选地,所述清洁机器人还包括至少两组接触开关;一组所述接触开关设置于所述主机的前端,并且位于所述前撞本体和所述主机之间,而用于缓冲和检测所述前撞组件在前后方向碰撞到的障碍物;另一组所述接触开关设置于所述主机的侧壁,并且位于所述侧板和所述主机之间,而用于缓冲和检测所述前撞组件在左右方向碰撞到的障碍物。
13.可选地,所述接触开关包括检测电路板、按钮开关以及弹性件,所述按钮开关安装
在所述检测电路板上,所述按钮开关具有凸出的按钮部,所述弹性件的一端套设在所述按钮部上而与所述按钮部联动,所述弹性件的另一端靠近或者接触所述前撞组件设置。
14.可选地,所述接触开关还包括密封胶套,所述密封胶套包覆所述弹性件、所述按钮开关和所述检测电路板,并露出所述检测电路板背向所述按钮开关的侧面的部分,所述密封胶套远离所述主机的一端与所述前撞组件接触设置。
15.可选地,所述密封胶套远离所述主机的一端的内部设有导柱部,所述导柱部对应所述弹性件远离所述按钮开关的一端设置,所述导柱部的端部用于插入所述弹性件的端部中。
16.区别于现有技术的情况,本实用新型实施例公开了的清洁机器人包括主机和前撞组件,前撞组件包括前撞本体、自前撞本体弯折延伸的侧板,前撞本体安装于主机的前端,侧板延伸至主机的侧壁,其中,前撞组件可相对于主机在前后方向和左右方向上运动。由此,前撞组件可在两个方向起到缓冲保护的作用,使用起来较为方便。
附图说明
17.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明且不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
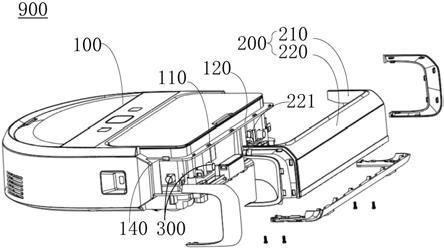
18.图1是本实用新型其中一个实施例中的清洁机器人的结构分解图;
19.图2是图1中的前撞组件的结构示意图;
20.图3是清洁机器人的一剖视图;
21.图4是图3的a区域的放大图;
22.图5是清洁机器人的另一剖视图;
23.图6是图5中b区域的放大图。
具体实施方式
24.为了便于理解本实用新型,下面结合附图和具体实施方式,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
25.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.此外,下面所描述的本实用新型不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
27.如图1所示,本实用新型其中一个实施例提供的清洁机器人900,包括主机100以及前撞组件200,所述前撞组件200安装于所述主机100。其中,所述前撞组件200包括前撞本体210以及自所述前撞本体210的两端弯折延伸的侧板220,所述前撞本体210安装于所述主机
100的前端,所述侧板220延伸至所述主机100的侧壁,所述前撞组件200可相对于所述主机100在前后方向和左右方向上运动。在本实施例中,所述前后方向指所述清洁机器人前进或后退的方向,所述左右方向以前后方向为基准,且是与所述前后方向垂直的方向。
28.请结合图1与图2,在本实施例中,所述前撞本体210设置有第一限位槽211,所述主机100设置有第一限位凸台110,所述第一限位凸台 110卡接于所述第一限位槽211,其中,所述第一限位凸台110与所述第一限位槽211具有余量,以允许所述前撞组件200可相对于所述主机100 在前后方向和左右方向上运动。
29.进一步地,所述主机100的前端延伸有支撑板120,所述第一限位凸台110固定于所述支撑板120,所述前撞本体210承载于所述支撑板 120,其中,所述前撞本体210与所述主机100具有余量,进而允许所述前撞组件200可相对于主机100在前后方向和左右方向上运动。
30.如图3与图4所示,在本实施例中,所述主机100延伸有第二限位凸台130,所述前撞本体设置有第二限位槽212,所述第二限位凸台130 卡接于所述第二限位槽212,其中,所述第二限位凸台130与所述第二限位槽212具有余量,以允许所述前撞组件200可相对于主机100在前后方向和左右方向上运动。在本实施例中,所述第一限位槽211位于所述前撞本体210的顶端,所述第二限位槽211位于所述前撞本体210的底端。由此,所述前撞本体210的顶端以及底端,均与所述主机100连接,可以确保所述前撞本体210与所述主机100连接的稳固性。
31.请再次参阅图1,在本实施例中,所述主机100的侧壁设置有限位卡勾140,所述侧板220设置有卡孔221,所述限位卡勾140卡接于所述卡孔221内,所述限位卡勾140与所述卡孔221之间具有余量,以允许所述前撞组件200可相对于所述主机100在前后方向和左右方向上运动。
32.在本实施例中,位于所述前撞本体210两端的所述侧板220分别延伸至所述主机100的两相对侧壁。对应地,主机100的两相对侧壁均设置有至少一所述限位卡勾140,一所述限位卡勾140可活动卡接于一侧板的卡孔221内。优选地,所述限位卡勾140的数量为两个,两个所述限位卡勾140分别位于所述主机100的两相对侧壁。由此,所述前撞组件200的所述侧板220与所述主机100的侧壁连接。
33.请结合图3、图5与图6,在一些实施例中,所述清洁机器人900 还包括至少两组接触开关300,其中一组所述接触开关300设置于所述主机100的前端,并且位于所述前撞本体210和主机100之间,如图5 所示,该组所述接触开关300用于缓冲和检测所述前撞组件200在前后方向是否碰撞到障碍物。另一组所述接触开关300设置于所述主机100 的侧壁,并且位于所述侧板220和主机100之间,如图3所示,该组所述接触开关300用于缓冲和检测所述前撞组件200在左右方向是否碰撞到障碍物。由此,通过两组所述接触开关300,所述清洁机器人900可以在两个方向上判断是否碰撞到障碍物,同时可以缓冲碰撞,使用起来更为方便。
34.进一步地,为了所述清洁机器人900能更好地识别和缓冲障碍物,一方面,结合图5,所述主机100与所述前撞本体210之间设置有两个所述接触开关300,该两个所述接触开关300为一组,并且这两个接触开关300位于所述主机100的前端的两侧。另一方面,结合图3,所述主机100的两侧以及所述前撞组件200两侧的所述侧板220之间各设置有一所述接触
开关300,该两个接触开关300为另外一组,从而可以使所述清洁机器人900从左侧以及右侧均可判断侧边是否存在障碍物以及起到侧面缓冲作用。可以理解的是,每一组接触开关300的数量可以根据实际需要设置,并不限于上述情况。
35.请结合图6,每一接触开关300包括检测电路板301、按钮开关310 以及弹性件350,该检测电路板301通过走线与清洁机器人900的主板电连接。按钮开关310安装在所述检测电路板301上,所述按钮开关310 具有凸出的按钮部330。所述弹性件350的一端套设在所述按钮部330 上而与所述按钮部330联动,所述弹性件350的另一端靠近或者接触所述前撞组件200设置。当前撞组件200前后或者左右移动时,其与弹性件350抵接,弹性件350弹性收缩而起到缓冲保护作用,同时弹性件350 联动按钮部330,按钮部330触发按钮开关310,检测电路板301检测到碰撞而输出信号,清洁机器人900的主板上的控制器接收信号并控制清洁机器人900后退。
36.进一步地,接触开关300还包括密封胶套320,密封胶套320包覆检测电路板301、按钮开关310以及弹性件350,并露出所述检测电路板301背向所述按钮开关310的侧面的部分,所述密封胶套320远离所述主机100的一端与前撞组件200接触设置。该密封胶套320起到密封按钮开关310的作用,防止清洁机器人900洗地时受到潮湿环境的影响,检测电路板301露出密封胶套320的部分侧面用于走线。
37.结合图1和图6,为了安装接触开关300,主机100的前端和侧壁均设有卡槽,该卡槽上下延伸设置,其朝向前撞组件200的槽壁上开设有避让部,接触开关300自卡槽的底部插入其中,接触开关300的一端自避让部伸出卡槽,然后在卡槽的底部卡扣安装支撑片,接触开关300 的密封胶套320与卡槽挤压。由于检测电路板301露出密封胶套320的部分侧面朝向主机100的内部,且卡槽挤压检测电路板301的周缘的表面,完全可以保证接触开关300的密封性。
38.结合图6,进一步地,所述密封胶套320远离所述主机的一端的内部设有导柱部340,所述导柱部340对应所述弹性件350远离所述按钮开关310的一端设置,所述导柱部340的端部用于插入所述弹性件350 的端部中。当密封胶套320受到前撞组件的挤压时,导柱部340向后移动而插入弹性件350的端部中,直到密封胶套320的端部挤压到弹性件 350的端部,该导柱部340起到导向密封胶套320的端部朝向弹性件350 的收缩方向移动的作用。优选地,该弹性件350为弹簧,该按钮开关310 为轻触开关,该密封胶套320为柔弹硅胶材质。
39.需要说明的是,当所述前撞组件200碰到障碍物时,密封胶套320 受压收缩,弹性件350被挤压,按钮部330与弹性件350联动,此时所述检测电路板301输出信号,以使清洁机器人900的控制器获知前方或侧方存在障碍物,进而控制清洁机器人900后退,并调整方向。
40.本实用新型实施例公开了的清洁机器人900包括主机100和前撞组件200;前撞组件200包括前撞本体210、自所述前撞本体210的两端弯折延伸的侧板220,所述前撞本体210安装于所述主机100的前端,所述侧板220延伸至所述主机100的侧壁,其中,所述前撞组件200可相对于主机100在前后方向和左右方向上运动。由此,所述前撞组件200 可在两个方向起到缓冲保护的作用,使用起来较为方便。同时,清洁机器人的主机100上设置有至少两组接触开关300,可以监控所述清洁机器人于所述前后方向以及所述左右方向上前行是否存在障碍物,同时起到缓冲作用,使用起来更为方便。
41.以上所述仅为本实用新型的实施方式,并非因此限制本实用新型的专利范围,凡
是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
