1.本技术涉及地理测绘的技术领域,尤其是涉及一种用于复杂地形的地理测绘用飞行器。
背景技术:
2.目前地理测绘用飞行器通常采用的是无人机对地形进行勘测,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域的应用,极大的拓展了无人机本身的用途。
3.现有的飞行器通常设置有探测相机,通过探测相机对所需要拍摄的物体进行拍摄。
4.针对上述中的相关技术,飞行器在飞行过程中,探测相机只能对固定角度的物体进行拍摄,发明人认为存在有满足使用者对于不同拍摄角度的需求的可能性较小的缺陷。
技术实现要素:
5.为了能够提高满足使用者对于不同拍摄角度的需求的可能性,本技术提供一种用于复杂地形的地理测绘用飞行器。
6.本技术提供的一种用于复杂地形的地理测绘用飞行器采用如下的技术方案:
7.一种用于复杂地形的地理测绘用飞行器,包括飞行器本体和设置在飞行器本体上的支撑腿,所述飞行器本体上设置有固定板,所述固定板上转动配合有转动架,所述转动架内安装有探测相机,所述固定板上设置有转动装置,所述转动装置包括用于带动转动架转动的转动杆和用于驱动转动杆转动的驱动组件,所述驱动组件安装于固定板上,所述转动杆安装于驱动组件上,所述固定板用于对转动杆转动支撑。
8.通过采用上述技术方案,固定板上设置有转动装置,启动驱动组件,能够带动转动杆转动,进而带动转动架转动,实现探测相机的转动,能够提高满足使用者对于不同拍摄角度的需求的可能性。
9.优选的:所述驱动组件包括安装于固定板上的驱动件、安装于驱动件输出轴上的蜗杆一和啮合于蜗杆一上的蜗轮一,所述转动杆穿设于蜗轮一内。
10.通过采用上述技术方案,启动驱动件,能够带动蜗杆一转动,带动蜗轮一转动,进而带动转动杆转动,能够实现探测相机的转动。
11.优选的:所述固定板上设置有支撑套筒,所述转动架上设置有转动套筒,所述转动杆穿设于支撑套筒和转动套筒内,且转动杆与支撑套筒转动配合,转动杆与转动套筒固定连接。
12.通过采用上述技术方案,通过支撑套筒的设置,能够对转动杆进行转动支撑,使转动杆的转动更加稳定。
13.优选的:所述转动架上设置有安装框架,所述探测相机抵接于安装框架内,所述安
装框架上设置有用于对探测相机挤压锁紧的锁紧装置。
14.通过采用上述技术方案,安装框架上设置有锁紧装置,旋动锁紧装置,使锁紧装置能够对探测相机进行挤压锁紧,进而实现对探测相机的安装,使探测相机的安装更加便捷。
15.优选的:所述探测相机上设置有锁紧块,所述锁紧块上开设有锁紧槽,所述锁紧装置抵接于锁紧槽内,且锁紧装置用于对锁紧槽挤压锁紧。
16.通过采用上述技术方案,旋动锁紧装置,使锁紧装置能够对锁紧槽挤压锁紧,进而实现锁紧装置和锁紧块的锁紧,操作便捷。
17.优选的:所述锁紧装置包括用于对锁紧块挤压锁紧的挤压块和用于驱动挤压块与锁紧块锁紧的滑动组件,所述滑动组件安装于安装框架上,所述挤压块设置于滑动组件上,所述挤压块上设置有锥形面,所述锥形面抵接于锁紧块上,且挤压块用于对锁紧块挤压锁紧。
18.通过采用上述技术方案,旋动滑动组件,能够带动挤压块向靠近锁紧块处运动,并通过锥形面对锁紧块进行挤压锁紧,能够实现对锁紧块的挤压锁紧,进而实现对探测相机的安装,安装较为便捷。
19.优选的:所述滑动组件包括转动配合于安装框架上的蜗杆二、啮合于蜗杆二上的蜗轮二和穿设于蜗轮二内的螺杆,所述挤压块螺纹配合于螺杆上,且挤压块与安装框架滑动配合。
20.通过采用上述技术方案,旋动蜗杆二,能够带动蜗轮二转动,带动螺杆转动,进而能够带动挤压块在螺杆上进行滑动,实现挤压块与锁紧块之间的固定锁紧。
21.优选的:所述锁紧块靠近挤压块的一端的内壁上设置有导向斜面。
22.通过采用上述技术方案,通过导向斜面的设置,使挤压块向锁紧块内滑动时,挤压块的滑动更加稳定,同时使挤压块与锁紧块之间的接触面积更大,使挤压块与锁紧块之间的锁紧更加稳定。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过在固定板上设置有转动装置,启动驱动组件,能够带动转动杆转动,进而带动转动架转动,实现探测相机的转动,能够提高满足使用者对于不同拍摄角度的需求的可能性;
25.2.通过在安装框架上设置有锁紧装置,旋动锁紧装置,使锁紧装置能够对探测相机进行挤压锁紧,进而实现对探测相机的安装,使探测相机的安装更加便捷。
附图说明
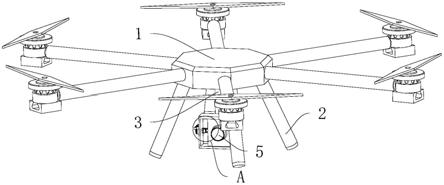
26.图1是本技术的局部剖视图;
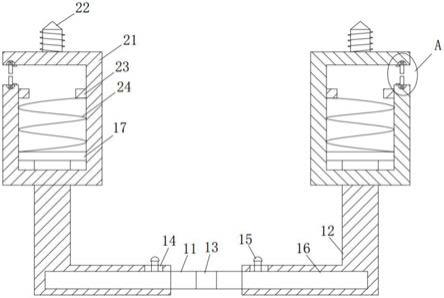
27.图2是图1中a处的局部放大图;
28.图3是示出固定板和转动架的连接关系的结构示意图;
29.图4是图3中b处的局部放大图。
30.附图标记:1、飞行器本体;2、支撑腿;3、固定板;31、支撑套筒;32、安装板;4、转动架;41、转动套筒;5、探测相机;6、转动装置;61、转动杆;62、驱动组件;621、驱动件;622、蜗杆一;623、蜗轮一;624、蓄电池组;7、安装框架;71、限位板;8、锁紧装置;81、挤压块;811、锥形面;82、滑动组件;821、蜗杆二;822、蜗轮二;823、螺杆;824、旋钮;9、锁紧块;91、锁紧槽;
92、导向斜面。
具体实施方式
31.以下结合附图1
‑
4对本技术作进一步详细说明。
32.本技术实施例公开一种用于复杂地形的地理测绘用飞行器。参照图1和图2,一种用于复杂地形的地理测绘用飞行器,包括飞行器本体1和固定设置在飞行器本体1上的支撑腿2,支撑腿2在飞行器本体1的下表面均匀设置有四个,支撑腿2为圆柱杆。结合图3,飞行器本体1的下表面上设置有固定板3,固定板3为竖直设置的矩形板,固定板3上转动配合有转动架4,转动架4为弓形结构,转动架4内安装有探测相机5,探测相机5由竖直设置的矩形壳体和矩形壳体上设置的圆柱状镜头构成,飞行器本体1在飞行过程中,通过探测相机5对待测绘地形进行拍摄作业。
33.参照图3和图4,转动架4上固定设置有安装框架7,结合图2,安装框架7由竖直设置的“回”字型框架和固定设置在“回”字型框架上靠近固定板3的一端上的竖直设置的矩形板构成,安装框架7上设置有用于对探测相机5挤压锁紧的锁紧装置8,需要对探测相机5使用时,先将探测相机5抵接于安装框架7内,并通过锁紧装置8将探测相机5进行固定安装。
34.参照图1和图2,探测相机5靠近锁紧装置8的侧面上固定设置有锁紧块9,锁紧块9为竖直设置的矩形块,锁紧块9上开设有锁紧槽91,锁紧槽91为锁紧块9上从靠近锁紧装置8的侧面向远离锁紧装置8的侧面延伸开设的矩形通槽,将探测相机5抵接于安装框架7内后,使锁紧装置8抵接于锁紧槽91内,通过锁紧装置8对锁紧槽91挤压锁紧。
35.其中,参照图2和图3,锁紧装置8包括用于对锁紧块9挤压锁紧的挤压块81和用于驱动挤压块81与锁紧块9锁紧的滑动组件82,结合图4,滑动组件82安装于安装框架7上,滑动组件82包括转动配合于安装框架7上的蜗杆二821、啮合于蜗杆二821上的蜗轮二822和固定穿设于蜗轮二822内的螺杆823,蜗杆二821沿着安装框架7的宽度方向上设置,安装框架7的侧面上固定设置有用于对蜗杆二821转动支撑的矩形板,蜗杆二821远离固定板3的一端固定设置有旋钮824,旋钮824为圆柱杆。蜗轮二822竖直设置,螺杆823沿着安装框架7的长度方向上设置,将旋钮824旋动,带动蜗杆二821转动,带动蜗轮二822转动,带动螺杆823转动。
36.参照图2和图3,挤压块81的横截面为梯形,挤压块81螺纹配合于螺杆823上,安装框架7的内侧壁上固定设置有限位板71,限位板71为水平设置的矩形板,挤压块81的底端抵接于限位板71上,挤压块81与安装框架7滑动配合。螺杆823转动时,带动挤压块81在限位板71上滑动,挤压块81上设置有锥形面811,挤压块81靠近锁紧块9的一端尺寸小于另一端的尺寸,锁紧块9靠近挤压块81一端的内壁上设置有导向斜面92,安装框架7的上、下表面内壁的竖直厚度从靠近挤压块81的一端向另一端延伸的方向上逐渐增大。挤压块81向靠近锁紧块9内滑动,且锥形面811抵接于锁紧块9的导向斜面92上时,挤压块81对锁紧块9挤压锁紧,完成对探测相机5的安装。
37.参照图3和图4,为了能够提高满足使用者对于不同拍摄角度的需求的可能性,在固定板3上固定设置有转动装置6,转动装置6包括用于带动转动架4转动的转动杆61和用于驱动转动杆61转动的驱动组件62,固定板3上固定设置有安装板32,安装板32为水平设置的矩形板,驱动组件62固定安装于安装板32上,驱动组件62包括固定安装于安装板32上的驱
动件621、固定安装于驱动件621输出轴上的蜗杆一622和啮合于蜗杆一622上的蜗轮一623,驱动件621可直接采用电动机构成,驱动件621沿着安装框架7的宽度方向上设置,安装板32上固定设置有用于为驱动件621供电的蓄电池组624。蜗杆一622沿着安装框架7的长度方向上设置,安装板32上固定设置有用于对蜗杆一622转动支撑的矩形板,蜗轮一623竖直设置,启动驱动件621,带动蜗杆一622转动,带动蜗轮一623转动。
38.参照图3和图4,转动杆61为水平设置的圆柱杆,转动杆61固定穿设于蜗轮一623内,固定板3上固定设置有支撑套筒31,支撑套筒31为水平设置的中空圆柱杆,且支撑套筒31沿着转动杆61的长度方向上间隔设置有两个,转动架4上固定设置有转动套筒41,转动套筒41为中空圆柱杆,且转动套筒41位于两个支撑套筒31之间。转动杆61穿设于支撑套筒31和转动套筒41内,转动杆61与支撑套筒31转动配合,通过支撑套筒31对转动杆61转动支撑,转动杆61与转动套筒41固定连接。蜗轮一623转动时,带动转动杆61转动,带动转动套筒41和转动架4转动,进而带动探测相机5转动。
39.本技术实施例一种用于复杂地形的地理测绘用飞行器的实施原理为:需要对待测绘地形进行拍摄作业时,先将探测相机5推入安装框架7内,并旋动滑动组件82,带动挤压块81插入到锁紧槽91内,通过挤压块81将锁紧块9固定锁紧。接着通过飞行器本体1进行航拍,飞行器本体1在飞行过程中,通过探测相机5对待测绘地形进行拍摄作业,并启动驱动组件62,带动转动杆61和转动架4进行转动,进而带动探测相机5转动,能够提高满足使用者对于不同拍摄角度的需求的可能性。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。