1.本实用新型涉及医护设备技术领域,具体涉及一种组合式智能医疗护理床椅。
背景技术:
2.随着社会文明的发展进步,保障和提高老年人及残障人士等弱势群体的生活质量,已经越来越受到社会各界人士的普遍关注。大量研究表明,有效增强老年人以及残障人士的行动能力,不仅使得他们的日常生活变得方便,而且对他们的心理健康、自我评价、精神状态也有着深远的影响。因此,能为老年人以及残障人士提供方便的组合式轮椅应运而生。
3.中国专利cn201356724y公开了一种组合式轮椅床,它是在轮椅床的三面包围有门字形的整体床框,窗框的高度与轮椅平放时的高度相等,该实用新型使轮椅床面加长加宽,避免因病人翻身而掉床现象;轮椅床与床框脱离后,将轮椅床折叠成舒适的轮椅可外出病房,病人不需要从轮椅和病床之间来回换位,为护理带来方便,但轮椅靠背的形成仍需依靠护理者体力协助才能完成轮椅和病床的分离,被护理人不能自主完成。
4.中国专利cn204618652u公开了一种床
‑
轮椅组合式护理床,床体居中部分向床尾的一侧设有可从床上分离出的坐躺变换轮椅,床体靠近床头的一端设有倒u形的床背板,所述轮椅的靠背卡在床背板的u形框内,床背板上对应于轮椅靠背的位置设有可将轮椅靠背托起的托片,床背板背面与能够抬升床背板角度的抬升机构连接。该实用新型结构设计合理,通过手动摇杆或电动推杆将动力传递给床背板,床背板通过托片将动力传递给轮椅靠背,轮椅靠背仅依靠床实现其升降作用,既方便又简单;但护理床与轮椅的分离过程仍需要护理人员协助完成。
5.中国专利cn205947949u公开了一种小腿位床板床垫可上折内移的电动床椅转换护理床,该床床架的小腿位床板床垫处有一缺口 (左右侧均可,小腿位床板床垫是由纵向分割的二或三床板床垫组成,各块床板床垫间有关节相连,小腿位床板床垫由点推杆向上一侧内移,在小腿位显露缺口,为病人坐起下腿及下床活动腾出空间,这时,臀位床板床垫变成椅面,背位床板床垫升起形成了椅子的靠背,病床转换为座椅后,能使病人舒适地(后有靠背,脚能着地)坐在椅面上,方便了病人下地站立及行走,结构简单高效,为病人减少卧床时间,减少并发症的发生创造了必要的条件,只需通过操控器就能完成床椅转换功能,达到能自我护理的目的;但对体力不足或下半身行动不便的人士并不适用。
6.因此急需一种操作简便,自动化程度高,适用于体力不足或下半身行动不便的人士使用的护理床椅。
技术实现要素:
7.实用新型目的:针对现有技术中存在的问题,本实用新型提供一种组合式智能医疗护理床椅,操作简便,适用于体力不足或下半身行动不便的人士使用的护理床椅,提高其生活自理能力、自我认可度和生活满意度,同时减轻护理人员的劳动强度。
8.技术方案:本实用新型提供了一种组合式智能医疗护理床椅,包括床头部、轮椅部、床尾部;所述床头部和床尾部一端转动连接,所述床头部与所述床尾部之间设置有容纳腔,所述容纳腔与所述轮椅部放平后的尺寸匹配;所述轮椅部可分离地与所述床头部和床尾部连接;所述轮椅部上设置有驱动所述轮椅部动作的驱动机构。
9.进一步地,所述轮椅部包括轮椅框架以及设置于所述轮椅框架上的所述座椅后靠背板、座椅扶手板、座椅前挡板、行走轮以及底座板;
10.所述驱动机构包括第一电动推杆、第二电动推杆、靠背电机以及用于驱动行走轮的第一驱动电机;
11.所述底座板靠近座椅后靠背板的一侧边转动连接于所述轮椅框架上,所述第二电动推杆一端固定安装在所述轮椅框架上,另一端转动连接于所述底座板前侧;
12.所述座椅前挡板与所述底座板铰接,其下表面与所述第一电动推杆转动连接;
13.所述座椅后靠背板与所述底座板铰接,所述座椅后靠背板背面下端两侧通过一对支撑杆连接有一对调角器,一对所述调角器之间固定连接扭力杆,所述扭力杆与所述靠背电机连接;所述靠背电机驱动所述扭力杆旋转。
14.进一步地,所述驱动机构还包括第二驱动电机,所述座椅扶手板与所述底座板铰接,所述座椅扶手板通过连杆组件与连杆器连接,所述连杆器与所述第二驱动电机连接。
15.进一步地,所述连杆组件包括第一连杆与第二连杆,所述第一连杆为“z”字形,其一端与一侧的所述座椅扶手板转动连接,另一端与所述连杆器转动连接;所述第二连杆为“一”字形,其一端与另一侧的所述座椅扶手板转动连接,另一端与所述连杆器转动连接,所述连杆器转动实现座椅扶手板相对于所述底座板旋转。
16.进一步地,所述轮椅部还设置有脚踏板,所述脚踏板固定设置在所述轮椅框架上。
17.进一步地,所述底座板上还设有集便机构,所述集便机构包括便盆架、便盆、便架以及便垫,所述便盆架固定于所述底座板下表面一侧,所述便盆架上设有便盆;所述底座板中间位置设置为中空结构,其下表面一侧转动连接有便架,所述便架另一侧通过卡扣固定于所述底座板下表面,所述便架上还放置有便垫。
18.有益效果:
19.1、本实用新型将轮椅与护理床作为单个整体,并能够将轮椅与护理床组合成整体的护理床椅,轮椅和床对接后,轮椅直接在床头床尾之间,不容易出现晃动,比较安全。
20.2、本实用新型将轮椅座椅后靠背板、座椅扶手板均通过电机控制其调节角度,而且可以通过连杆组件保证左右两侧的座椅扶手板同时调节,便于体力不足或下半身行动不便的人士使用。
21.3、本实用新型当轮椅与护理床分离时,首先由护理床的床尾部打开,由第二电动推杆伸出,将轮椅的底座板顶出一定的角度,使轮椅处于倾斜角度,方便轮椅部从医疗护理床椅中移出。
22.4、本实用新型还在轮椅上设置集便机构,并且将底座板中间位置设置为中空结构,便于病患躺着或者坐着时使用集便机构方便。
附图说明
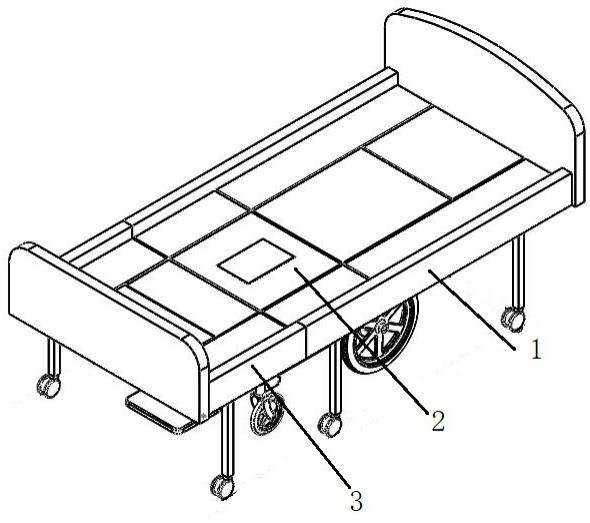
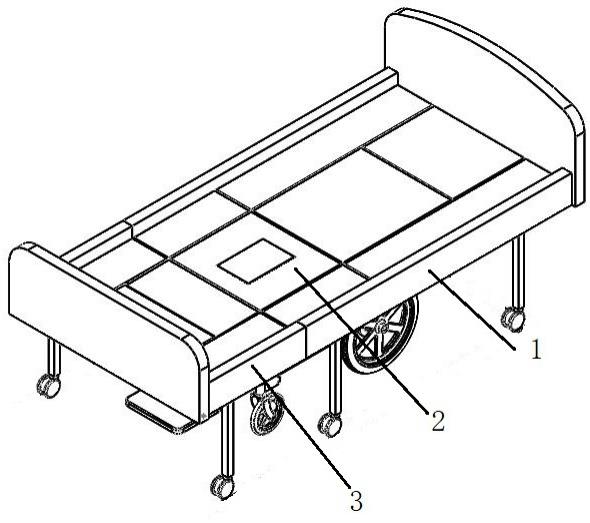
23.图1为本实用新型轮椅和床对接后的整体结构示意图;
24.图2为本实用新型轮椅和床拆分过程结构示意图;
25.图3为本实用新型床体结构示意图;
26.图4为本实用新型轮椅部结构示意图;
27.图5为本实用新型实施例的轮椅部第一电动推杆和第二电动推杆局部视图;
28.图6为本实用新型实施例的轮椅部座椅后靠背板、座椅扶手板旋转控制结构示意图;
29.图7为本实用新型实施例集便装置结构示意图;
30.图8为本实用新型控制系统结构框。
31.其中,1
‑
床头部,2
‑
轮椅部,201
‑
座椅后靠背板,202
‑
座椅扶手板,203
‑
座椅前挡板,204
‑
第一电动推杆,205
‑
第二电动推杆,206
‑
调角器,207
‑
靠背电机,208
‑
连杆器,209
‑
扭力杆,210
‑
轮椅框架,211
‑
行走轮,212
‑
底座板,213
‑
脚踏板,214
‑
便盆架,215
‑
便盆,216
‑
便架,217
‑
便垫,218
‑
第一连杆,219
‑
第二连杆,220
‑
支撑杆,3
‑
床尾部。
具体实施方式
32.下面结合附图对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
33.请见图1,本实用新型提供的一种组合式智能医疗护理床椅及其智能控制系统,包括床头部1、轮椅部2和床尾部3以及设置于轮椅部2内的智能控制系统。床头部1和床尾部3一端可旋转地连接在一起,其可以通过铰链连接,参见附图2与附图3。轮椅部2可分离地与床头部1和床尾部3组合在一起。在本实施方式中,床头部1与床尾部3之间设置有容纳腔,容纳腔与轮椅部2放平后的尺寸匹配。
34.请见图2,本实施例的床头部1和床尾部3之间的旋转可以是人工进行旋转,也可以是电动旋转,把床尾部3相对床头部1旋转打开90度(如图2),以便电动轮椅从床中开出来(电动轮椅回到电动床的过程与此过程相反进行)。
35.请见图4
‑
6,本实施例的轮椅部2包括座椅后靠背板201、座椅扶手板202、座椅前挡板203、第一电动推杆204、第二电动推杆205、调角器206、靠背电机207、连杆器208、扭力杆209、轮椅框架210、行走轮211、底座板212、脚踏板213、集便机构214。行走轮211上设置第一驱动电机,用于驱动行走轮211行走。
36.座椅后靠背板201、座椅扶手板202、座椅前挡板203、第一电动推杆204、第二电动推杆205、调角器206、靠背电机207、连杆器208、扭力杆209、行走轮211均设置在轮椅框架210上,底座板212靠近座椅后靠背板201的一侧边转动连接于轮椅框架210上。
37.座椅前挡板203与底座板212通过铰链相连,其下表面与第一电动推杆204转动连接,在第一电动推杆204控制下能实现90
°
旋转。
38.座椅后靠背板201与底座板212通过铰链相连,座椅后靠背板201背面下端两侧通过一对支撑杆220连接有一对调角器206,一对调角器206之间固定连接扭力杆209,扭力杆209与靠背电机207连接,靠背电机207驱动扭力杆209旋转。调角器206用于调节座椅后靠背板201旋转的角度,靠背电机207提供动力,并通过扭力杆209传递到调角器206,使座椅后靠背板201在靠背电机207控制下实现旋转。
39.座椅扶手板202与底座板212通过铰链相连,座椅扶手板202通过连杆组件与连杆
器208连接,连杆器208与第二驱动电机连接。连杆器208用于将左右两侧的座椅扶手板202同时旋转一定角度,第二驱动电机驱动连杆器208转动,连杆器208转动的情况下带动座椅扶手板202旋转至放平或者立起。
40.本实施方式中,连杆组件包括第一连杆218与第二连杆219,第一连杆218为“z”字形,其一端与一侧的座椅扶手板202转动连接,另一端与连杆器208转动连接;第二连杆219为“一”字形,其一端与另一侧的座椅扶手板202转动连接,另一端与连杆器208转动连接,连杆器208转动实现座椅扶手板202相对于底座板212旋转。
41.第二电动推杆205一端固定安装在轮椅框架210上,另一端转动连接于底座板212前侧,用于推动底座板212围绕底座板212旋转一定角度,从而顶出轮椅部2一定的角度,方便轮椅部2从医疗护理床椅中移出。
42.轮椅部2还设置有脚踏板213,脚踏板213固定设置在轮椅框架210上。
43.底座板212上还设有集便机构,集便机构包括便盆架214、便盆215、便架216以及便垫217,便盆架214固定于底座板212下表面一侧,便盆架214上设有便盆215;底座板212中间位置设置为中空结构,其下表面一侧转动连接有便架216,便架216另一侧通过卡扣固定于底座板212下表面,便架216上还放置有便垫217。
44.在轮椅部2内还可以设置智能控制系统,请见图8,本实施例的智能控制系统由控制器、h桥驱动电路、无线通信模块、摄像头、无线路由器、移动控制终端、web视频服务器、上位机和多个红外传感器组成,多个红外传感器用于实时获取轮椅部2周围的障碍物信息,对这些信息进行处理,并根据信息处理结果做出逻辑判断,决定轮椅部2是否自主运行或停止前进。控制器、h桥驱动电路、无线通信模块、无线路由器固定设置在轮椅部2内。摄像头若干,分别设置在轮椅部2四周,用于获取轮椅部2周围的环境信息,并对采集到的视频数据通过无线通信模块和无线路由器上传到本地的web视频服务器,之后再由web服务器将视频数据转发到上位机;移动控制终端通过无线通信模块和无线路由器与上位机连接,用于发送控制指令给上位机;上位机与通过无线通信模块和无线路由器与控制器网络连接,上位机发送控制指令到控制器,控制器接收到指令后对指令进行解析,根据不同的指令产生相应的pwm控制信号,并通过h桥驱动电路控制轮椅部2上的驱动机构运行,进而完成对轮椅部2的运动控制。轮椅部2上的驱动机构包括第一电动推杆204、第二电动推杆205、靠背电机207、第一驱动电机、第二驱动电机。
45.本控制系统硬件主要采用模块化设计:super4412开发板、模块和h桥驱动电路设计等。本控制系统软件主要基于android操作系统平台进行开发设计,分别开发了对应下位机和上位机的android应用软件。web服务器端建立在笔记本电脑上,基于tomcat进行开发。控制系统主要实现的功能是,通过远端上位机实时向下位机传送控制指令,实现基于网络的对轮椅车的操控,包括在本地覆盖范围内对轮椅车的控制和远端通过internet实现对轮椅车的控制,以及实时视频传输功能。
46.本控制系统主要采用两个架构:指令传送采用c/s架构,下位机运行socket server上位机通过socket建立连接;视频传输采用b/s架构,下位机采集视频数据,经过压缩处理后通过dopost方式上传到pc端web服务器,上位机通过doget方式从web服务器下载视频数据并实时显示。
47.工作原理:
48.当需要将轮椅部2从床体上分离出来时,首先打开床尾部3,使床头部1与床尾部3旋转分离,第二驱动电机与靠背电机207工作,将座椅后靠背板201、座椅扶手板202立起来,形成轮椅。第二电动推杆205伸出,使得底座板212相对于轮椅框架210向上旋转一定角度,这样轮椅部2与床体分离,便于轮椅部2移出床体。
49.第一驱动电机驱动行走轮211行走,将轮椅直接移出床体。移出床体后,第一电动推杆204与第二电动推杆205均收缩,使轮椅处于正常使用状态。
50.轮椅部2单独使用时,传感器、摄像头实时检测轮椅周围的环境信息对采集到的传感器数据进行信息处理,根据信息处理结果做出逻辑判断,决定轮椅部2是否自主运行或停止前进。对采集到的视频数据通过无线通信模块和无线路由器上传到本地的web视频服务器,之后再由web服务器将视频数据转发到上位机,上位机与通过无线通信模块和无线路由器与控制器网络连接,上位机发送控制指令到控制器,控制器接收到指令后对指令进行解析,根据不同的指令产生相应的pwm控制信号,并通过h桥驱动电路控制轮椅部2上的第一驱动电机开启和关闭。
51.上述实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所做的等效变换或修饰,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。