1.本实用新型涉及一种空间相机地面模拟扫描成像转台装置技术领域,特别涉及一种基于粘滑惯性和尺蠖驱动结合的宏微精密定位平台。
背景技术:
2.二维转台是地面模拟实验环节中实现相机获取各方位角度信息的关键设备,二维转台的机械台体可以实现水平和方位两个自由度的运动,为了使二维转台获得更高的精准度,近年来国内外的一些学者开始广泛关注微动定位平台的研究与应用,并以研究出具有良好性能的微动定位平台,尤其是近几年发展迅速的压电粘滑驱动器与压电尺蠖驱动器,基于粘滑驱动原理的压电驱动器因具有结构简单、精度高、行程大和抗电磁干扰等优点,在微运动方面得到了广泛应用,但当负载物过重时,严重影响了粘滑驱动的工作效率,并且粘滑驱动在回退时会产生一段负位移,从而影响整体定位精度,而众多种类的压电驱动器中,压电尺蠖驱动器是根据自然界中生物尺蠖的运动原理设计的,与其它类型的压电驱动器相比,保证精度的同时具有运动连续性的优点。
3.基于以上原因,现有二维转台和微动定位平台仍面临的问题有以下几点:
4.(1)粘滑驱动实质是以摩擦力作为动力源进行驱动,但当负载过大时,粘滑驱动所产生的摩擦力不足,导致定位精度不准确,严重影响整个微动定位平台的工作精度。
5.(2)粘滑驱动是以“粘”和“滑”两种状态通过摩擦力进行驱动,但在“滑”运动时会产生一段回退位移,进而影响整个微动定位平台的定位精度和效率。
6.(3)现有的传统二维转台中,往往都是行程大却精度低,精度高却行程小,使得二维转台不能同时具备大行程和高精度的工作要求
技术实现要素:
7.本实用新型提供一种基于宏微结合的高精度二维转台,用以解决现有传统粘滑驱动器对于摩擦力的调控问题,通过粘滑惯性和尺蠖驱动相结合的方法,补偿了粘滑驱动中所产生的回退运动,实现连续驱动,通过叠堆型压电陶瓷驱动实现精密微动定位,并利用“桥式”铰链作为动力传动和位移放大机构,以实现高精度和大行程的技术要求。
8.本
技术实现要素:
包括;宏动方位转台、宏动水平转台以及微动定位平台,所述的宏动水平转台通过螺栓连接在主动转轴ⅰ,所述的微动定位平台螺栓连接在所述的u型工作台上。
9.本实用新型所述宏动方位转台包括:空心轴电机ⅰ、副框架、主动转轴ⅰ、编码器ⅰ、圆锥滚子轴承,所述的空心轴电机ⅰ通过螺栓连接在所述的副框架上,所述的主动转轴ⅰ与所述的副框架通过所述的圆锥滚子轴承相连,所述的编码器ⅰ固连于空心轴电机ⅰ上。
10.本实用新型所述的宏动水平转台包括:空心轴电机ⅱ、主动转轴ⅱ、深沟球轴承、从动转轴、主框架、u型工作台、编码器ⅱ、角接触轴承,所述的空心轴电机ⅱ通过螺栓连接在所述的主框架,所述的主动转轴ⅱ通过所述的深沟球轴承连接在主框架上,所述的从动
转轴通过所述的角接触轴承连接在主框架上,所述的u型工作台通过螺栓连接在主动转轴和从动转轴之间,所述的编码器固连在从动转轴上。
11.本实用新型所述的微动定位平台包括:x向定位平台、y向定位平台,方位轴定位平台和工作平台,所述的x向定位平台通过螺栓连接在u型工作台上,所述的y向定位平台通过螺栓连接在x向位移滑块上,所述的方位轴定位平台通过螺栓连接在所述的y向位移滑块上,所述的工作平台通过螺栓连接在转轴上。
12.本实用新型所述的x向定位平台包括:x向定位平台基座、x向导轨槽、锁紧单元、x向中心导轨、x向导轨固定块、x向位移滑块和驱动单元,所述的x向定位平台基座为长方体结构,其上表面x向长轴线两端对称分布两个x向导轨槽,所述的x向定位平台基座通过螺栓连接在所述的u型工作台上,所述的x向中心导轨两端分别固定在两个所述的x向导轨固定块内,所诉的x向导轨固定块通过螺栓连接在所述的x向定位平台基座的x向长轴线两端,所述的x向位移滑块套在所述的x向中心导轨上,所述的锁紧单元分布在x向位移滑块两端,所述的锁紧单元通过螺栓连接在x向定位平台基座上对x向位移滑块起夹持作用,所述的驱动单元通过滑块安装在x向导轨槽上,所述的驱动单元分布在x向位移滑块两侧,同侧的两个驱动单元交替驱动达到连续驱动的目的,两侧的驱动单元交替驱动实现对x向位移滑块的双向驱动。
13.本实用新型所述的y向定位平台包括:y向定位平台基座、y向导轨槽、锁紧单元、y向中心导轨、y导轨固定块、y向位移滑块和驱动单元,所述的y向定位平台基座为长方体结构,其上表面y向长轴线两端对称分布两个y向导轨槽,所述的y向定位平台基座通过螺栓连接在所述的x向位移滑块上,所述的y向中心导轨两端分别固定在所述的y导轨固定块内,所述的y导轨固定块通过螺栓连接在所述的y向定位平台基座的y向长轴线两端,所述的y向位移滑块套在所述的y向中心导轨上,所述的锁紧单元分布在y向位移滑块两端,所述的锁紧单元通过螺栓连接在y向定位平台基座上对y向位移滑块起夹持作用,所述的驱动单元通过滑块安装在y向导轨槽上,所述的驱动单元分布在y向位移滑块两侧,同侧的两个驱动单元交替驱动达到连续驱动的目的,两侧的驱动单元交替驱动实现对y向位移滑块的双向驱动。
14.本实用新型所述的一种基于粘滑惯性和尺蠖驱动结合的宏微精密定位平台,其特征在于所述的方位轴定位平台包括:方位轴定位平台基座、凹槽、方位轴导轨槽、锁紧单元、v形块、转轴、轴承、驱动单元和工作平台,所述的方位轴定位平台基座为阶梯盘结构上表面中心含有一个凹槽,且四周均布四个导轨槽其中两个与x轴平行、两个与y轴平行,所述的转轴与所述的轴承内环固连,所述的轴承外环固连在所述的凹槽处,所述的两个锁紧单元通过螺栓安装在所述的凹槽两侧,所述的v形块通过螺栓连接在螺母柱上,所述的四个驱动单元通过滑块安装在方位轴导轨槽内,所述的驱动单元两两配合工作使转轴实现顺时针或逆时针两个方向的转动,所述的工作平台通过螺栓连接所述的转轴上。
15.本实用新型所述的一种基于粘滑惯性和尺蠖驱动结合的宏微精密定位平台,所述的驱动单元包括:滑块、连接块、桥式铰链和压电叠堆,所述的滑块在导轨槽内,所述的连接块通过螺钉连接在所述的滑块上,所述的桥式铰链左端固连在所述的连接块右端,所述的压电叠堆通过锁紧螺钉固连在桥式铰链上。
16.本实用新型所述的锁紧单元包括;底座、双头螺柱、弹簧和螺母柱,所述的底座通过螺栓连接在各个基座上,所述的双头螺柱通过螺栓连接在所述的底座上端,所述的弹簧
安装在所述的双头螺柱上,所述的螺母柱连接在所述的双头螺柱上,所述的锁紧机构在装置不需要运动时,起到紧锁作用。
17.与现有技术相比,本实用新型的优点是
18.(1)本实用新型的微动定位平台,与传统粘滑驱动方式不同,该微动定位平台采用的桥式铰链放大机构进行对滑块施加压力,可为粘滑驱动过程中增加驱动力,在承载物重量较大时依旧保持准确度。
19.(2)本实用新型的微动定位平台,采用粘滑驱动与尺蠖驱动相结合的运动形式,可有效避免粘滑驱动在回退阶段所产生的负位移,并且将压电元件的单步微位移进行累加,形成连续的精密位移输出。
20.(3)本实用新型的二维转台,所采用宏微结合技术,微动定位平台负责进行高精度定位,宏动方位转台和宏动水平转台进行大行程运动,使得二维转台获得大行程且高精度的工作要求。
附图说明
21.图1是本实用新型的结构示意图;
22.图2是本实用新型宏动方位转台剖面图;
23.图3是本实用新型宏动水平转台剖面图;
24.图4是本实用新型x向定位平台结构示意图;
25.图5是本实用新型y向定位平台结构示意图;
26.图6是本实用新型方位轴定位平台结构示意图;
27.图7是本实用新型驱动单元结构示意图;
28.图8是本实用新型锁紧单元结构示意图;
29.图9是本实用新型工作平台结构示意图;
30.附图标记说明:宏动方位转台1、宏动水平转台2、x向定位平台3、y向定位平台4、方位轴定位平台5、驱动单元6、锁紧单元7、v形块8、工作平台9、空心轴电机ⅰ1
‑
1、副框架1
‑
2、主动转轴ⅰ1
‑
3、编码器ⅰ1
‑
4、圆锥滚子轴承1
‑
5、空心轴电机ⅱ2
‑
1、主动转轴ⅱ2
‑
2、深沟球轴承2
‑
3、从动转轴2
‑
4、主框架2
‑
5、u型工作台2
‑
6、编码器ⅱ2
‑
7、角接触轴承2
‑
8、x向定位平台基座3
‑
1、x向导轨槽3
‑
2、x向中心导轨3
‑
3、x导轨固定块3
‑
4、x向位移滑块3
‑
5、y向定位平台基座4
‑
1、y向导轨槽4
‑
2、y向中心导轨4
‑
3、y 导轨固定块4
‑
4、y向位移滑块4
‑
5、方位轴定位平台基座5
‑
1、凹槽5
‑
2、方位轴导轨槽5
‑
3、转轴5
‑
4、轴承5
‑
5、滑块6
‑
1、连接块6
‑
2、桥式铰链6
‑
3、压电叠堆6
‑
4、垫片6
‑
5、底座7
‑
1、双头螺柱7
‑
2、弹簧7
‑
3、螺母柱7
‑
4。
具体实施方式
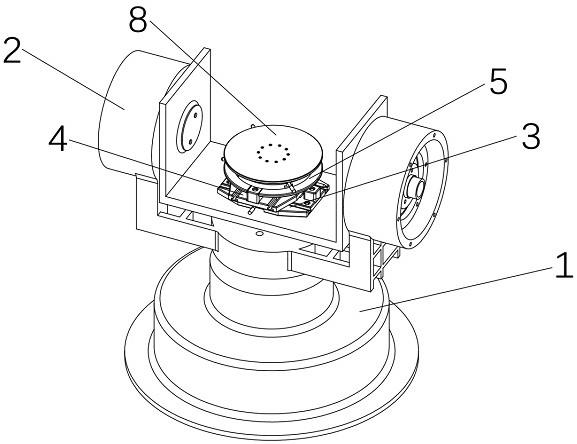
31.如图1所示,为本实用新型的结构示意图,包括宏动方位转台1、宏动水平转台2、x向定位平台3、y向定位平台4、方位轴定位平台5和工作平台9,宏动方位转台1下端固定在地面上,为装置提供方位轴方向的宏转动,宏动水平转台2通过螺栓连接在方位轴上挡板1
‑
5处,为装置提供水平方向的宏转动,x向定位平台3通过螺栓连接在u型工作台2
‑
2上,提供x方向的微位移,y向定位平台4通过螺栓连接在x向位移滑块3
‑
5上,提供y方向的微位移,方位轴定位平台5通过螺栓连接在所述的y向位移滑块4
‑
5上,提供方位轴方向的微转动,所述
的工作平台9通过螺栓连接在转轴5
‑
4上。
32.如图2所示,为本实用新型宏动方位转台剖面图,所述宏动方位转台包括:空心轴电机ⅰ1
‑
1、副框架1
‑
2、主动转轴ⅰ1
‑
3、编码器ⅰ1
‑
4和圆锥滚子轴承1
‑
5,所述的空心轴电机ⅰ1
‑
1通过螺栓连接在所述的副框架1
‑
2上,所的主动转轴ⅰ1
‑
3与所述的副框架1
‑
2通过所述的圆锥滚子轴承1
‑
5相连,所述的编码器ⅰ1
‑
4固连于空心轴电机ⅰ1
‑
1上。
33.如图3所示,为本实用新型宏动水平转台剖面图,所述的宏动水平转台包括:空心轴电机ⅱ2
‑
1、主动转轴ⅱ2
‑
2、深沟球轴承2
‑
3、从动转轴2
‑
4、主框架2
‑
5、u型工作台2
‑
6、编码器ⅱ2
‑
7和角接触轴承2
‑
8,所述的空心轴电机ⅱ2
‑
1通过螺栓连接在所述的主框架2
‑
5,所述的主动转轴ⅱ2
‑
2通过所述的深沟球轴承2
‑
3连接在主框架2
‑
5上,所述的从动转轴2
‑
4通过所述的角接触轴承2
‑
8连接在主框架上,所述的u型工作台2
‑
6通过螺栓连接于主动转轴2
‑
2和从动转轴2
‑
4之间,所述的编码器2
‑
7固连于从动转轴2
‑
4上。
34.如图4所示,为本实用新型x向定位平台结构示意图,所述的x向定位平台包括:x向定位平台基座3
‑
1、y向导轨槽3
‑
2、锁紧单元7、x向中心导轨3
‑
3、x导轨固定块3
‑
4、x向位移滑块3
‑
5和驱动机构6,所述的x向定位平台基座3
‑
1为长方体结构,其上表面x向长轴线两端对称分布两个y向导轨槽3
‑
2,所述的x向定位平台基座3
‑
1固连在u型工作台1
‑
6上,所述的x向中心导轨3
‑
3两端分别固定在两个所述的x向导轨固定块内3
‑
4,所诉的x向导轨固定块通过螺栓连接在所述的x向定位平台基座3
‑
1的x向长轴线两端,所述的x向位移滑块3
‑
5套在所述的x向中心导轨3
‑
3上,所述的锁紧单元8分布在x向位移滑块3
‑
5两端,所述的锁紧单元7通过螺栓连接在x向定位平台基座3
‑
1上对x向位移滑块3
‑
5起夹持作用,所述的驱动单元6 通过滑块6
‑
1安装在y向导轨槽3
‑
2上,所述的驱动单元6分布在x向位移滑块3
‑
5两侧,对x向位移滑块3
‑
5进行双向驱动。
35.如图5所示,为本实用新型y向定位平台结构示意图,所述的y向定位平台包括:y向定位平台基座4
‑
1、x向导轨槽4
‑
2、锁紧单元7、y向中心导轨4
‑
3、y导轨固定块4
‑
4、y向位移滑块4
‑
5和驱动机构6,所述的y向定位平台基座4
‑
1为长方体结构,其上表面y向长轴线两端对称分布两个x向导轨槽4
‑
2,所述的y向定位平台基座4
‑
1通过螺栓连接在所述的x向位移滑块4
‑
5上,所述的y向中心导轨4
‑
3两端分别固定在所述的y导轨固定块4
‑
4内,所述的y导轨固定块4
‑
4通过螺栓连接在所述的y向定位平台基座4
‑
1的y向长轴线两端,所述的y向位移滑块4
‑
5套在所述的y向中心导轨4
‑
3上,所述的锁紧单元7分布在y向位移滑块4
‑
5两端,所述的锁紧单元7通过螺栓连接在y向定位平台基座4
‑
1上对y向位移滑块起夹持作用,所述的驱动单元6通过滑块安装在x向导轨槽4
‑
2上,所述的驱动单元6分布在y向位移滑块4
‑
5两侧,对y向位移滑4
‑
5块进行双向驱动。
36.如图6所示,为本实用新型方位轴定位平台结构示意图,其所述的方位轴定位平台包括:方位轴定位平台基座5
‑
1、凹槽5
‑
2、方位轴导轨槽5
‑
3、锁紧单元7、v形块8、转轴5
‑
4、轴承5
‑
5和驱动单元6,所述的方位轴定位平台基座5
‑
1为阶梯盘结构上表面中心含有一个凹槽5
‑
2,且四周均布四个方位轴导轨槽5
‑
3其中两个与x轴平行、两个与y轴平行,所述的转轴5
‑
4与所述的轴承5
‑
5内环固连,所述的轴承5
‑
5外环固连在所述的凹槽5
‑
2处,所述的两个锁紧单元7通过螺栓均匀安装在所述的凹槽5
‑
2两侧,所述的v形块8通过螺栓连接在螺母柱7
‑
4上,所述的四个驱动单元6通过滑块安装在方位轴导轨槽5
‑
3。
37.如图7所示,为本实用新型驱动单元结构示意图,其所述的驱动单元包括:滑块6
‑
1、连接块6
‑
2、桥式铰链6
‑
3、压电叠堆6
‑
4和垫片6
‑
5,所述的滑块6
‑
1在导轨槽内,所述的连接块6
‑
2通过螺钉以及所述的垫片6
‑
5连接在所述的滑块6
‑
1上,所述的桥式铰链6
‑
3左端固连在连接块右端,所述的压电叠堆6
‑
4通过锁紧螺钉连接在桥式铰链6
‑
3上。
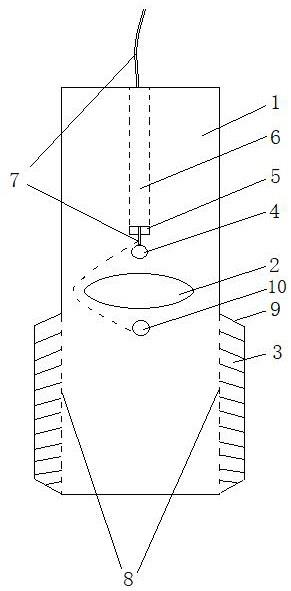
38.如图8所示,为本实用新型锁紧单元结构示意图,所述的锁紧单元包括;底座7
‑
1、双头螺柱7
‑
2、弹簧7
‑
3和螺母柱7
‑
4,所述的底座7
‑
1通过螺栓连接在各个基座上,所述的双头螺柱7
‑
2通过螺栓连接在所述的底座7
‑
1上端,所述的弹簧7
‑
3安装在所述的双头螺柱7
‑
2上,所述的螺母柱7
‑
4连接在所述的双头螺柱7
‑
2上。如图9所示,为本实用新型工作平台结构示意图,所述的工作平台9通过螺栓连接在转轴5
‑
4上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。