1.本发明属于智能电网领域,具体涉及一种基于adpss/etsdac的永磁直驱型风力发电机组电磁暂态模型的构建方法。
背景技术:
2.由于我国能源行业碳排放占全国总量的80%以上,其中电力行业碳排放在能源行业中的占比超过40%,为实现碳达峰碳中和目标,我国已明确将构建以新能源为主体的新型电力系统。从供给侧方面看,新能源将逐步发展成为装机和电量主体,近年来,我国新能源产业快速发展,截至2020年年底,我国风电、太阳能发电装机约5.3亿千瓦,占总装机容量的24%。随着能源转型步伐持续加快,预计2030年风电和太阳能发电装机达到12亿千瓦以上,规模超过煤电,成为第一大电源;到2060年前,新能源发电量占比有望超过50%,成为电量主体。
3.相比与太阳能发电,风力发电发展时间长、技术更成熟,且风力发电更稳定、年利用小时更高,使得风力发电应用更加广泛。为研究风电系统接入电力系统后的稳定性问题,有必要兼顾大电网仿真速度与精确模拟风电场动态特性的需求,建立风电场精细化仿真模型,以此分析其与电力系统的耦合特性。
4.根据时间尺度的不同,常规建模方法有电磁暂态建模和机电暂态建模。机电暂态模型则是将风电场部分进行简化处理,由于机电暂态模型是基于基波、单相、相量的模型,无法反映风电场所包含的大量绝缘栅双极型晶体管(insulated gate bipolar transistor,igbt)等电力电子器件的动态过程,无法满足实际工程的仿真精度需求,所以风电场一般采用电磁暂态建模。现有的电磁暂态仿真软件中应用较为广泛的包括matlab/simulink、pscad/emtdc、rtds以及adpss,其中matlab/simulink和pscad/emtdc仿真平台不具有实时性,而rtds为国外仿真平台,存在技术壁垒。
技术实现要素:
5.本发明的目的是针对现有技术存在的上述问题,提供一种基于adpss/etsdac的永磁直驱型风力发电机组电磁暂态模型的构建方法。
6.为实现以上目的,本发明的技术方案如下:一种永磁直驱型风力发电机组电磁暂态模型的构建方法,该方法基于adpss/etsdac仿真平台,依次包括以下步骤:步骤a、构建风力机仿真模型;步骤b、构建永磁同步发电机仿真模型,该模型为三相电流源等效模型;步骤c、分别构建机侧变流器控制仿真模型和网侧变流器控制仿真模型;步骤d、将得到的风力机仿真模型、永磁同步电机仿真模型以及控制仿真模型互联,并利用adpss/etsdac中的电压源元件进行电网电压模拟,从而得到永磁直驱型风力发电机组电磁暂态模型。
7.步骤b中,所述永磁同步发电机仿真模型为:上式中,、分别为d轴、q轴电抗,t为时间,为定子每相电阻,为磁链幅值,为风力机的转动惯量,为转动粘黏系数,为发电机极对数,为转子转速,为转子电角速度,为风力机输出机械转矩,为发电机输入电磁转矩, 、分别为d轴、q轴电流,、分别为d轴、q轴电压。
8.所述永磁同步发电机仿真模型包括机械部分模型和电气部分模型,所述电气部分模型包括端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块;所述永磁同步发电机仿真模型的构建是指:先分别构建机械部分模型、端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块,然后将各模块进行互联即可,其中,所述机械部分模型的构建方法为:以风力机输出机械转矩、发电机输入电磁转矩、转动粘黏系数、发电机极对数以及发电机转子转速作为输入,以发电机转子转速、转子电角速度作为输出,根据以下公式构建机械部分模型,并将输出结果作为反馈形成闭环:械部分模型,并将输出结果作为反馈形成闭环:所述端电压dq变换模块的构建方法为:将永磁同步发电机的电气输出等效为三个受控电流源,先测得永磁同步发电机的端电压、、,然后以端电压、转子电角度作为输入,以dq旋转坐标系下的定子电压d轴分量、q轴分量作为输出,根据以下公式构建端电压dq变换模块,其中,所述转子电角度由转子电角速度通过积分得到:由转子电角速度通过积分得到:
;所述dq轴电流计算模块的构建方法为:以定子每相电阻、d轴和q轴电压、d轴和q轴电流、d轴和q轴电感、转子电角速度、磁链幅值作为输入,以d轴和q轴电流作为输出,根据以下公式构建dq轴电流计算模块,并将输出结果作为反馈形成闭环:所述park反变换模块的构建方法为:以d轴和q轴电流、转子电角度作为输入,以各受控电流源的控制电流信号作为输出,根据以下公式构建park反变换模块:出,根据以下公式构建park反变换模块:上式中,、、分别为a、b、c三相电流源的控制电流信号;所述电磁转矩计算模块的构建方法为:以发电机极对数、磁链幅值、d轴和q轴电感、d轴和q轴电流作为输入,以发电机的输入电磁转矩作为输出,根据以下公式构建电磁转矩计算模块:。
9.步骤c中,所述机侧变流器控制仿真模型的构建依次包括以下步骤:c1、将d轴电流的给定值设定为0,并根据以下公式计算最佳风能利用率下的最优风力机输出功率和输出机械转矩:优风力机输出功率和输出机械转矩:上式中,为最优风力机输出功率,为最优风力机输出机械转矩,为空气密度,为叶片半径,为风速,为最佳风能利用系数,为发电机转子转速;c2、将最优风力机输出机械转矩带入以下公式中得到q轴电流的给定值:;
c3、将与d轴电流的实际值作差后输入pi控制模块,pi控制模块输出的电压控制信号与交叉耦合电压作差后输出机侧变流器pwm波控制信号的d轴分量,同时,将与q轴电流的实际值的偏差信号输入pi控制模块,pi控制模块输出的电压控制信号加上交叉耦合电压和后输出机侧变流器pwm波控制信号的q轴分量。
10.所述步骤c3中,将与d轴电流的实际值作差得到的偏差信号乘以阶跃信号t1后输入pi控制模块。
11.步骤c中,所述网侧变流器控制仿真模型的构建方法为:将直流电容电压给定值与直流电容电压实际值作差后输入pi控制模块,以pi控制模块输出的信号作为d轴电流的给定值与d轴电流的实际值作差后输入下一pi控制模块,下一pi控制模块输出的电压控制信号加上交叉耦合电压和后输出网侧变流器pwm波控制信号的d轴分量,同时,q轴电流的给定值被设定为0,将其与q轴电流的实际值作差后输入pi控制模块,与pi控制模块输出的电压控制信号、交叉耦合电压作差后输出网侧变流器pwm波控制信号的q轴分量,其中,、、、由网侧线路电流以及三相电压以电网电压为基准经dq变换得到,为转子电角速度,为网侧电感。
12.将所述直流电容电压给定值与直流电容电压实际值作差得到的偏差信号乘以阶跃信号t2后输入pi控制模块;将所述q轴电流的给定值与q轴电流的实际值作差得到的偏差信号乘以阶跃信号t2后输入下一pi控制模块。
13.所述步骤a依次包括以下步骤:a1、以发电机转子转速、叶片半径、风速以及桨距角作为输入,基于下列公式构建风能利用系数计算模块:上式中,为发电机转子转速,为叶片半径,为风速,为叶尖速比,为桨距角,为中间参数,为风能利用系数;a2、以风能利用系数、空气密度、叶片半径、风速以及发电机转子转速作为输入,基于下列公式构建风力机输出功率及机械转矩计算模块:
上式中,为空气密度,为风力机输出功率,为风力机输出机械转矩,、分别为风力机工作的风速最小、最大值。
14.a3、将风能利用系数计算模块与风力机输出功率及转矩计算模块进行互联,以得到风力机仿真模型。
15.步骤d中,所述电网电压模拟包括:采用电阻元件、电感元件以及电容元件对输电线路以及滤波器进行模拟,采用igbt半桥开关器件对机侧变流器以及网侧变流器进行模拟。
16.与现有技术相比,本发明的有益效果为:1、本发明一种永磁直驱型风力发电机组电磁暂态模型的构建方法基于adpss/etsdac仿真平台,先分别构建风力机仿真模型、永磁同步发电机仿真模型、机侧变流器和网侧变流器控制仿真模型,再将上述模型互联,并利用adpss/etsdac中的电压源元件进行电网电压模拟,该方法不仅为有效分析直驱型风力发电机组的动态特性、直驱型风力发电对电力系统的影响等提供了基础平台,而且为风电场的电压/频率主动支撑技术提供了参考依据,为实现以新能源为主体的新型电力系统提供了很好的技术手段。
17.2、本发明一种永磁直驱型风力发电机组电磁暂态模型的构建方法将永磁直驱风机发电机组拆分为多个模块,一方面,鉴于adpss平台上没有现成的相关模块供参考,本设计采用先对每个模块分别进行开环设计最终形成闭环的方式,以保证所构建模块的正确性,另一方面,针对在闭环中若某一信号既是输入又是输出、计算模块就不知道该从何处开始计算的问题,本设计在形成闭环时并未使用in、out输入输出节点,而是将输出信号直接连接到输入端口,再加上所选用的积分模块存在积分初值,从而保证了闭环计算的顺利进行。
18.3、本发明一种永磁直驱型风力发电机组电磁暂态模型的构建方法通过在pi控制模块前增加一乘法器模块,用时间信号t1或t2乘以输入实现输入信号有或为0,从而达到了机侧、网侧的分时段投入控制的目的。
附图说明
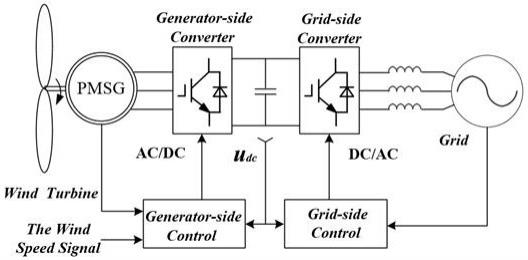
19.图1为永磁直驱型风力发电机组的结构示意图。
20.图2为机械部分模型的示意图。
21.图3为dq轴电流计算模块的示意图。
22.图4为各模块的互联框图。
23.图5为机侧变流器的控制结构框图。
24.图6为网侧变流器的控制结构框图。
25.图7为直流电容电压随时间的变化图。
26.图8为无功功率随时间的变化图。
27.图9为风力机的叶尖速比随时间的变化图。
28.图10为有功功率随时间的变化图。
29.图11为永磁同步电电机输出电流随时间的变化图。
30.图12为网侧电流随时间的变化图。
具体实施方式
31.下面结合具体实施方式以及附图对本发明作进一步详细的说明。
32.参见图1
‑
图6,一种永磁直驱型风力发电机组电磁暂态模型的构建方法,该方法基于adpss/etsdac仿真平台,依次包括以下步骤:步骤a、构建风力机仿真模型;步骤b、构建永磁同步发电机仿真模型,该模型为三相电流源等效模型;步骤c、分别构建机侧变流器控制仿真模型和网侧变流器控制仿真模型;步骤d、将得到的风力机仿真模型、永磁同步电机仿真模型以及控制仿真模型互联,并利用adpss/etsdac中的电压源元件进行电网电压模拟,从而得到永磁直驱型风力发电机组电磁暂态模型。
33.步骤b中,所述永磁同步发电机仿真模型为:上式中,、分别为d轴、q轴电抗,t为时间,为定子每相电阻,为磁链幅值,为风力机的转动惯量,为转动粘黏系数,为发电机极对数,为转子转速,为转子电角速度,为风力机输出机械转矩,为发电机输入电磁转矩, 、分别为d轴、q轴电流,、分别为d轴、q轴电压。
34.所述永磁同步发电机仿真模型包括机械部分模型和电气部分模型,所述电气部分模型包括端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块;所述永磁同步发电机仿真模型的构建是指:先分别构建机械部分模型、端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块,然后将各模块进行互联即可,其中,所述机械部分模型的构建方法为:以风力机输出机械转矩、发电机输入电磁转矩、转动粘黏系数、发电机极对数以及发电机转子转速作为输入,以发电机转子转速、转子电角速度作为输出,根据以下公式构建机械部分模型,并将输出结果作为反馈形成闭环:
所述端电压dq变换模块的构建方法为:将永磁同步发电机的电气输出等效为三个受控电流源,先测得永磁同步发电机的端电压、、,然后以端电压、转子电角度作为输入,以dq旋转坐标系下的定子电压d轴分量、q轴分量作为输出,根据以下公式构建端电压dq变换模块,其中,所述转子电角度由转子电角速度通过积分得到:由转子电角速度通过积分得到:由转子电角速度通过积分得到:;所述dq轴电流计算模块的构建方法为:以定子每相电阻、d轴和q轴电压、d轴和q轴电流、d轴和q轴电感、转子电角速度、磁链幅值作为输入,以d轴和q轴电流作为输出,根据以下公式构建dq轴电流计算模块,并将输出结果作为反馈形成闭环:所述park反变换模块的构建方法为:以d轴和q轴电流、转子电角度作为输入,以各受控电流源的控制电流信号作为输出,根据以下公式构建park反变换模块:出,根据以下公式构建park反变换模块:上式中,、、分别为a、b、c三相电流源的控制电流信号;所述电磁转矩计算模块的构建方法为:以发电机极对数、磁链幅值、d轴和q轴电感、d轴和q轴电流作为输入,以发电机的输入电磁转矩作为输出,根据以下公式构建电磁转矩计算模块:。
35.步骤c中,所述机侧变流器控制仿真模型的构建依次包括以下步骤:c1、将d轴电流的给定值设定为0,并根据以下公式计算最佳风能利用率下的最优风力机输出功率和输出机械转矩:最优风力机输出功率和输出机械转矩:上式中,为最优风力机输出功率,为最优风力机输出机械转矩,为空气密度,为叶片半径,为风速,为最佳风能利用系数,为发电机转子转速;c2、将最优风力机输出机械转矩带入以下公式中得到q轴电流的给定值:;c3、将与d轴电流的实际值作差后输入pi控制模块,pi控制模块输出的电压控制信号与交叉耦合电压作差后输出机侧变流器pwm波控制信号的d轴分量,同时,将与q轴电流的实际值的偏差信号输入pi控制模块,pi控制模块输出的电压控制信号加上交叉耦合电压和后输出机侧变流器pwm波控制信号的q轴分量。
36.所述步骤c3中,将与d轴电流的实际值作差得到的偏差信号乘以阶跃信号t1后输入pi控制模块。
37.步骤c中,所述网侧变流器控制仿真模型的构建方法为:将直流电容电压给定值与直流电容电压实际值作差后输入pi控制模块,以pi控制模块输出的信号作为d轴电流的给定值与d轴电流的实际值作差后输入下一pi控制模块,下一pi控制模块输出的电压控制信号加上交叉耦合电压和后输出网侧变流器pwm波控制信号的d轴分量,同时,q轴电流的给定值被设定为0,将其与q轴电流的实际值作差后输入pi控制模块,与pi控制模块输出的电压控制信号、交叉耦合电压作差后输出网侧变流器pwm波控制信号的q轴分量,其中,、、、由网侧线路电流以及三相电压以电网电压为基准经dq变换得到,为转子电角速度,为网侧电感。
38.将所述直流电容电压给定值与直流电容电压实际值作差得到的偏差信号乘以阶跃信号t2后输入pi控制模块;将所述q轴电流的给定值与q轴电流的实际值作差得到的偏差信号乘以阶跃信号t2后输入下一pi控制模块。
39.所述步骤a依次包括以下步骤:a1、以发电机转子转速、叶片半径、风速以及桨距角作为输入,基于下列公式构建风能利用系数计算模块:
上式中,为发电机转子转速,为叶片半径,为风速,为叶尖速比,为桨距角,为中间参数,为风能利用系数;a2、以风能利用系数、空气密度、叶片半径、风速以及发电机转子转速作为输入,基于下列公式构建风力机输出功率及机械转矩计算模块:于下列公式构建风力机输出功率及机械转矩计算模块:上式中,为空气密度,为风力机输出功率,为风力机输出机械转矩,、分别为风力机工作的风速最小、最大值。
40.a3、将风能利用系数计算模块与风力机输出功率及转矩计算模块进行互联,以得到风力机仿真模型。
41.步骤d中,所述电网电压模拟包括:采用电阻元件、电感元件以及电容元件对输电线路以及滤波器进行模拟,采用igbt半桥开关器件对机侧变流器以及网侧变流器进行模拟。
42.本发明的原理说明如下:本发明提供了一种永磁直驱型风力发电机组电磁暂态模型的构建方法,该方法可以为研究新能源电源动态特性、新能源电源对电力系统的影响、电网对新能源电源的调控提供良好的实验平台。由于直驱永磁风力发电系统结构主要由风力机、永磁同步发电机、机侧变流器、网侧变流器、机侧和网侧控制系统等组成,本发明分别对各组成部分进行仿真建模,具体为:风力机仿真模型的建模:该模型利用adpss/etsdac中的基本函数运算中的元件实现输入输出的数学关系,并由限幅元件将风能利用系数的输出限制在
‑
0.01和0.5之间,且限幅元件另外在模块间设置了风速切入切出量,运用其他功能模块中的比较器元件实现输入风速的上下限与实际风速的比较,当风速不在该区间内时,风力机模型不工作。
43.永磁同步发电机仿真模型的建模:本发明将永磁同步发电机分为电气部分与机械部分,而电气部分又分为输出部分与机理部分,永磁同步电机电气输出部分用adpss/etsdac继电保护和电源中的三个受控电
流源等效。电气机理部分模型的建立过程中,采用转子磁场定向,对转子电角速度积分得到电角度,运用基本函数运算元件搭建park变换模块,由测得的永磁同步电机三相电压得到dq轴电压,随后依次搭建计算部分并通过传递函数中的积分模块得到dq轴电流、搭建park反变换模块得到三个受控电流源的控制信号、搭建计算公式得到电磁转矩。机械部分建模的输出为转子的转速,由电机的电磁转矩减去风力机的机械转矩以及考虑到的传动损耗并运用积分模块对结果进行积分后除以风机的转动惯量得到。
44.机侧变流器控制仿真模型的建模:永磁直驱同步发电机常采用表贴式pmsg,目前主要采用转子磁场定向的矢量控制技术实现对该类电机的控制,电机d轴、q轴电流分别用以控制输出无功以及转速,本发明控制电机定子电流d轴分量为0即输出无功为0,当风速变化时,通过控制电机定子电流q轴分量可实现对最佳转速的跟踪,使其始终保持最佳叶尖速比运行即可实现对发电机电磁功率和输出有功功率的准确控制,进而实现永磁直驱风力发电机的最佳风能跟踪控制。
45.实现机侧控制时输入为dq轴电流实际值与给定值,q轴电流给定值跟踪最大风能利用率情况下的电流给定值,首先假定最大风能利用率,反推出最大风能利用率情况下的最优转矩以及此时的q轴电流给定值,将得到的q轴电流给定值与实际值进行比较,经pi控制并加上交叉耦合电压最终输出机侧dq轴电压。
46.网侧变流器控制仿真模型的建模:对于网侧变换器,采用基于电网电压定向的矢量控制策略实现直流链电压控制和并网无功控制。网侧的d轴电流与输入电网的有功成正比,用以控制直流电容电压,而q轴电流的给定值则与无功相关,对dq轴电流分别进行pi调控得到控制电压并加上交叉耦合电压得到网侧dq轴电压。为充分利用变换器输入功率的变化信息,本发明在直流电压调节环输出的基础上增加反映发电机输出有功功率的前馈量,一起构成内环d轴电流给定,从而实现风速变化时网侧变换器d轴电流的迅速变化,及时将发电机输出的有功功率输入电网。
47.实现电网侧控制时输入为电容电压实际值与给定值以及dq轴电流实际值与给定值,电容电压实际值经基本函数运算中的减法器与给定值进行比较计算出误差,然后通过pi控制得到对应的网侧d轴电流的给定值,q轴电流给定值为0以控制网侧输出全为有功。
48.实施例1:一种如图1所示永磁直驱型风力发电机组的电磁暂态模型构建方法,该方法基于adpss/etsdac仿真平台,依次按照以下步骤进行:1、构建风力机仿真模型1.1、采用adpss中的运算函数元件,以发电机转子转速、叶片半径、风速以及桨距角作为输入,基于下列公式构建风能利用系数计算模块:
上式中,为发电机转子转速,为叶片半径,为风速,为叶尖速比,为桨距角,为中间参数,为风能利用系数;1.2、采用adpss中的运算函数元件,以风能利用系数、空气密度、叶片半径、风速以及发电机转子转速作为输入,基于下列公式构建风力机输出功率及机械转矩计算模块:及发电机转子转速作为输入,基于下列公式构建风力机输出功率及机械转矩计算模块:上式中,为空气密度,为风力机输出功率,为风力机输出机械转矩,、分别为风力机工作的风速最小、最大值;1.3、将风能利用系数计算模块与风力机输出功率及转矩计算模块进行互联,以构建得到风力机仿真模型;2、构建永磁同步发电机仿真模型,所述永磁同步发电机仿真模型包括机械部分模型和电气部分模型,所述电气部分模型包括端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块,具体构建方法为:2.1、分别构建机械部分模型、端电压dq变换模块、dq轴电流计算模块、park反变换模块、电磁转矩计算模块,其中,所述机械部分模型的构建方法为:以风力机输出机械转矩、发电机输入电磁转矩、转动粘黏系数、发电机极对数以及发电机转子转速作为输入,以发电机转子转速、转子电角速度作为输出,运用adpss中的代数运算元件,根据以下公式构建如图2所示的机械部分模型:数运算元件,根据以下公式构建如图2所示的机械部分模型:上式中,为转子转速,为转子电角速度,为风力机输出机械转矩,为发电机输入电磁转矩,为风力机的转动惯量,为转动粘黏系数,为发电机极对数,t为时间;所述端电压dq变换模块的构建方法为:
将永磁同步发电机的电气输出等效为三个受控电流源,先测得永磁同步发电机的端电压、、,然后以端电压、转子电角度作为输入,以dq旋转坐标系下的定子电压d轴分量、q轴分量作为输出,运用adpss中的代数运算以及基本函数元件,根据以下公式构建端电压dq变换模块,其中,所述转子电角度由转子电角速度通过积分得到,线路电压、由端电压、、转换而成:转换而成:转换而成:;所述dq轴电流计算模块的构建方法为:以定子每相电阻、d轴和q轴电压、d轴和q轴电流、d轴和q轴电感、转子电角速度、磁链幅值作为输入,以d轴和q轴电流作为输出,运用adpss中的代数运算元件,根据以下定子电压回路方程构建如图3所示的dq轴电流计算模块,并将输出结果作为反馈形成闭环:上式中,、分别为d轴、q轴电抗,t为时间,为定子每相电阻,为磁链幅值,、分别为d轴、q轴电流,、分别为d轴、q轴电压,为转子电角速度;所述park反变换模块的构建方法为:以d轴和q轴电流、转子电角度作为输入,以各受控电流源的控制电流信号作为输出,运用adpss中的代数运算元件,根据以下公式构建park反变换模块:出,运用adpss中的代数运算元件,根据以下公式构建park反变换模块:上式中,、、分别为a、b、c三相电流源的控制电流信号;所述电磁转矩计算模块的构建方法为:以发电机极对数、磁链幅值、d轴和q轴电感、d轴和q轴电流作为输入,以发电机的输入电磁转矩作为输出,运用adpss中的代数运算元件,根据以下公式构建电磁转矩计算模块:;
2.2、将上述各模块互联以构建永磁同步发电机仿真模型,各模块的互联关系如图4所示;3、构建机侧变流器控制仿真模型3.1、构建电流内环以得到dq轴电流的给定值,将d轴电流的给定值设定为0以控制机侧输出无功为0,并根据以下公式计算最佳风能利用率下的最优风力机输出功率和输出机械转矩、q轴电流,并将计算得到q轴电流值作为q轴电流的给定值:::上式中,为最优风力机输出功率,为最优风力机输出机械转矩,为空气密度,为叶片半径,为风速,为最佳风能利用系数,为发电机转子转速;3.2、参见图5,构建电压外环,与d轴电流的实际值作差后输入pi控制模块,pi控制模块输出的电压控制信号与交叉耦合电压作差后输出机侧变流器pwm波控制信号的d轴分量,同时,将与q轴电流的实际值的偏差信号输入pi控制模块,pi控制模块输出的电压控制信号加上交叉耦合电压和后输出机侧变流器pwm波控制信号的q轴分量,以此实现永磁直驱风力发电机的最佳风能跟踪控制;4、构建网侧变流器控制仿真模型参见图6,将直流电容电压给定值与直流电容电压实际值作差后输入pi控制模块,以pi控制模块输出的信号作为d轴电流的给定值与d轴电流的实际值作差后输入下一pi控制模块,下一pi控制模块输出的电压控制信号加上交叉耦合电压和后输出网侧变流器pwm波控制信号的d轴分量,同时,q轴电流的给定值被设定为0,将其与q轴电流的实际值作差后输入pi控制模块,与pi控制模块输出的电压控制信号、交叉耦合电压作差后输出网侧变流器pwm波控制信号的q轴分量,以此实现电容电压控制以及功率解耦控制,其中,、、、由网侧线路电流以及三相电压以电网电压为基准经dq变换得到,为网侧电感;5、将得到的风力机仿真模型、永磁同步电机仿真模型以及控制仿真模型互联,并利用adpss/etsdac中的电压源元件进行电网电压模拟,从而得到永磁直驱型风力发电机组电磁暂态模型,其中,所述电网电压模拟包括:采用电阻元件、电感元件以及电容元件对输电线路以及滤波器进行模拟,采用igbt半桥开关器件对机侧变流器以及网侧变流器进行模拟。
49.为验证本发明所述建模方法的有效性,进行如下试验:
仿真模型选取各参数为:环境空气密度为1.225kg/m3,风轮叶片半径为33.05m,转动粘黏系数为0.1n
·
s /m3,风机转动惯量为35000 kg
·
m2,磁链幅值为1.48wb,定子电阻为0.006,d、q轴电抗、均为0.3mh,极对数为48,运行时桨距角定为0
°
不变,网侧电感为0.2mh,风场接受到恒定风速12m/s。
50.控制过程如下:初始时刻变流器不进行控制,0.5s时控制直流侧充电,机侧不接收功率,网侧控制注入功率的功率因素恒为1,1s时启动机侧控制,开始接收并捕获最大风能,稳定的向电网输送有功功率。
51.0.5s时,网侧控制器控制电容电压开始充电,并且控制注入电网无功功率为0。电容电压给定值为1400v,可以看到电容电压达到给定值并保持稳定,1s时开始捕获风能并进行最大风能跟踪,并维持电容电压的稳定,具体波形如图7、8所示。
52.1s时机侧控制器开始投入,d轴电流的给定值为0,q轴电流用以跟踪最大风能捕获情况下的转矩,从而调整转子转速,使风机达到最佳尖速比,捕获最大风能;同时网侧控制器稳定地向电网输送有功功率,均在约2s时达到稳定,具体波形如图9、10所示。
53.对应的电机输出电流幅值在约2s时达到稳定,网侧逆变出的电流同时稳定在1.7ka,最终网侧输出功率也如图10稳定在1.45mw,由于设定的逆变功率因数为1,故输出全为有功功率,具体波形如图11、12所示。
54.通过以上仿真结果分析可知,风机在开始接受风能约1s后即达到了最大风能跟踪,且通过控制、使得输出无功功率为0,实现了有功功率和无功功率的解耦控制,完整地在adpss/etsdac平台上实现了永磁直驱风力发电系统的功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。