1.本发明属于水下机器人技术领域。
背景技术:
2.在21世纪,海洋资源发挥着越来越重要的作用,加大对水下机器人的研究具有深远意义。水下机器人在便携性、经济性、隐身性等方面具备独特的优势,在军民领域均具有广泛的应用前景。微小型水下机器人可用于海底地形测绘、对敌侦察、管道检测、水文信息检测、海洋生物检测等用途。
3.当水下机器人的执行某些特殊作业任务时,需要水下机器人具备足够的隐蔽性。但是遥控无人潜水器(rov)有电缆,其活动范围受缆绳限制。又由于水下通讯困难,无线电波在海水中衰减严重,常规无缆自主式水下航行器(auv)与上位机交互大量数据时,需要浮出水面才能完成,隐蔽性不足;并且由于浮出水面的动作还会存在能源损耗过多的问题。同时,当面临超视距的精细任务时,还存在远距离操作精度不足、无法实现信号的时时传输、浮态不易调节等问题。
技术实现要素:
4.本发明是为了解决现有水下机器人需要执行隐蔽任务时,遥控无人潜水器有电缆,活动范围受限,无缆自主式水下航行器隐蔽性不足能耗大,而且面临超视距的精细任务时,还存在远距离操作精度不足、无法实现信号的时时传输、浮态不易调节的问题,现提供一种可收放的水下机器人无线通讯装置及其通讯方法。
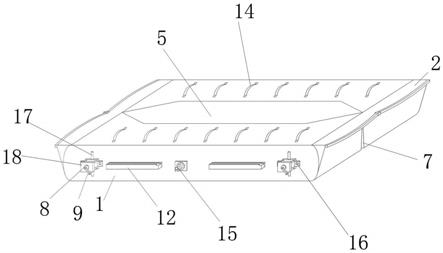
5.一种可收放的水下机器人无线通讯装置,包括:天线1、锁止装置2、浮力调节装置、信号线缆5、绞盘6、框架8、通讯控制器9和深度计;
6.框架8为中空的框架结构,绞盘6、浮力调节装置和通讯控制器9均固定在框架8内部,储液囊4和储液箱7之间通过液压马达3连通,锁止装置2固定在框架8顶部,锁止装置2用于锁定天线1,信号线缆5缠绕在绞盘6上,深度计用于采集天线1位于水下时的深度;
7.通讯控制器9与天线1之间通过信号线缆5进行数据交互,通讯控制器9的浮力控制信号输出端连接浮力调节装置的浮力控制信号输入端,通讯控制器9的绞盘驱动信号输出端连接绞盘6的驱动信号输入端,通讯控制器9的锁止控制信号输出端连接锁止装置2的锁止控制信号输入端。
8.进一步的,上述天线1为多功能天线,多功能天线本体内部包括无线电通讯模块、wifi通信模块和北斗定位模块。
9.进一步的,上述天线1通过水密插座与信号线缆5电气连接。
10.进一步的,上述锁止装置2包括底座21、电磁推杆22和推杆电机23,天线1底部设有连接块11,连接块11上开有卡孔,底座21上设有凹槽,连接块11能够嵌入在凹槽中,底座21上设有通道,该通道能够将底座21外表面和凹槽内表面连通,推杆电机23用于带动电磁推杆22沿其长度方向运动,当连接块11嵌入在凹槽内部时,电磁推杆22能够在推杆电机23的
带动下通过通道伸入至卡孔中,使得天线1被锁定。
11.进一步的,上述浮力调节装置包括:储液囊4、储液箱7和液压马达3,储液囊4和储液箱7通过液压马达3连通,液压马达3的驱动信号输入端作为浮力调节装置的浮力控制信号输入端。
12.进一步的,上述绞盘6包括电滑环和两个环形片,两个环形片均套接在电滑环的外圆周上、且两个环形片之间留有空隙,信号线缆5缠绕在电滑环的外圆周面上、且位于两个环形片之间,通讯控制器9与天线1之间通过位于电滑环主轴位置的信号连接口进行数据交互,电滑环的驱动信号输入端作为绞盘6的驱动信号输入端。
13.上述一种可收放的水下机器人无线通讯装置的通讯方法,包括以下步骤:
14.s1:实时采集水下机器人发送给通讯控制器9的控制信息;
15.s2:当控制信息为释放天线时,执行s3,当控制信息为回收天线时,执行s4;
16.s3:通讯控制器9向锁止装置2发送锁止控制信号,使锁止装置2解锁,
17.向绞盘6发送驱动信号,驱动绞盘6按照释放长度释放信号线缆5,使得天线1能够上浮至水面,所述释放长度为天线1位于水下的深度,
18.向液压马达3发送驱动信号,使得液压马达3将储液箱7内的液体泵入储液囊4;
19.s4:通讯控制器9向液压马达3发送驱动信号,使得液压马达3将储液囊4内的液体泵入储液箱7,
20.通讯控制器9向绞盘6发送驱动信号,驱动绞盘6回收信号线缆5,当绞盘6回收信号线缆5完毕时,执行s5;
21.s5:通讯控制器9向锁止装置2发送锁止控制信号,控制锁止装置2将天线1锁定。
22.进一步的,上述通讯方法s3中单位时间内储液箱7向储液囊4泵入液体的体积δv为:
[0023][0024]
其中,m为天线1的质量,ρ为水下机器人所在水域中水的密度,δv1为单位时间内天线1浸在水中的体积。
[0025]
进一步的,上述单位时间内天线1浸在水中的体积δv1具体表达式为:
[0026]
δv1=∫sdl,
[0027]
其中,s为天线1水平面的横截面积,l为单位时间信号线缆5的释放长度。
[0028]
进一步的,根据下式获得单位时间信号线缆5的释放长度l:
[0029][0030]
其中,c
d
为阻力系数,a为天线1运动过程中有效面积,t为信号线缆释放时间,v为天线1的整体体积,g为重力加速度。
[0031]
本发明与现有技术相比,具有以下有益效果:
[0032]
本发明提供了一种可收放的水下机器人无线通讯装置,通讯线缆用于连接水下机器人控制系统,以实现超视距的遥操作。同时还在保留内部控制信号的方式前提下,增加接收外部控制信号的方式,即:通过释放多功能天线与上位机实现连接。综上所述,当需要远距离精细遥操作时,则可以采用多功能天线通讯方式来保证信号传递,进而保证对精细任
务的执行;可通过浮力调节储液囊进行浮力调节,可以顺利完成水下多功能天线等装置释放回收,可减少能源消耗并提高auv隐蔽性。采用可收放的水下机器人无线通讯装置能够有效地解决上述问题,可以满足超视距控制需求的同时保证浮态的稳定。
附图说明
[0033]
图1为可收放的水下机器人无线通讯装置结构示意图;
[0034]
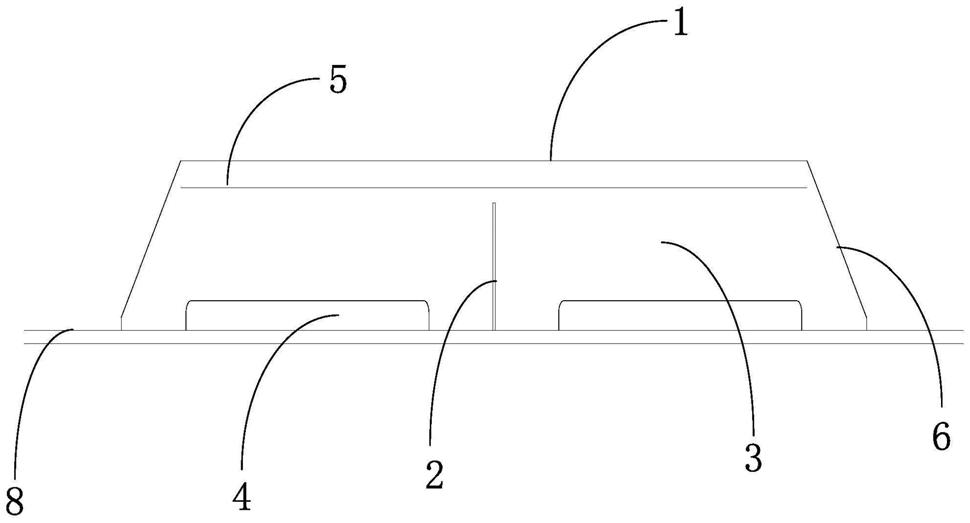
图2为天线释放至水面时的示意图;
[0035]
图3为天线单位时间浮力体积变化示意图;
[0036]
图4为天线与锁止装置的连接结构示意图;
[0037]
图5为天线单位时间浮力体积变化曲线图;
[0038]
图6为一种可收放的水下机器人无线通讯装置的通讯方法流程图。
具体实施方式
[0039]
具体实施方式一:参照图1至图5具体说明本实施方式,本实施方式所述的一种可收放的水下机器人无线通讯装置,包括:天线1、锁止装置2、浮力调节装置、信号线缆5、绞盘6、框架8、通讯控制器9和深度计。
[0040]
框架8为中空的框架结构,绞盘6、浮力调节装置和通讯控制器9均固定在框架8内部。浮力调节装置包括:储液囊4、储液箱7和液压马达3。储液囊4和储液箱7通过液压马达3连通,液压马达3的驱动信号输入端作为浮力调节装置的浮力控制信号输入端。
[0041]
储液囊4和储液箱7之间通过液压马达3连通。锁止装置2固定在框架8顶部。信号线缆5缠绕在绞盘6上,具体的,绞盘(6)包括电滑环和两个环形片,两个环形片均套接在电滑环的外圆周上、且两个环形片之间留有空隙,信号线缆(5)缠绕在电滑环的外圆周面上、且位于两个环形片之间。通讯控制器(9)与天线(1)之间通过位于电滑环主轴位置的信号连接口进行数据交互,电滑环的驱动信号输入端作为绞盘(6)的驱动信号输入端。
[0042]
深度计用于采集天线1位于水下时的深度。
[0043]
锁止装置2用于锁定天线1。具体的,锁止装置2包括底座21、电磁推杆22和推杆电机23,天线1底部设有连接块11,连接块11上开有卡孔,底座21上设有凹槽,连接块11能够嵌入在凹槽中,底座21上设有通道,该通道能够将底座21外表面和凹槽内表面连通,推杆电机23用于带动电磁推杆22沿其长度方向运动。当连接块11嵌入在凹槽内部时,电磁推杆22能够在推杆电机23的带动下通过通道伸入至卡孔中,使得天线1被锁定。
[0044]
通讯控制器9与天线1之间通过信号线缆5进行数据交互,天线1通过水密插座与信号线缆5电气连接,通讯控制器9的浮力控制信号输出端连接浮力调节装置的浮力控制信号输入端,通讯控制器9的绞盘驱动信号输出端连接绞盘6的驱动信号输入端,通讯控制器9的锁止控制信号输出端连接锁止装置2的锁止控制信号输入端。
[0045]
本实施方式中,天线1为多功能天线,多功能天线本体内部包括无线电通讯模块、wifi通信模块和北斗定位模块。框架8材料采用铝合金材质,非水密结构,这样浮力调节装置中的储液囊4就能够和水接触,实现调整储液囊4的体积来改变浮力。绞盘6包含电滑环,用于控制绞盘旋转,从而释放或者收起线缆。信号线缆5内部为铜轴线缆且为零净浮力状态。
[0046]
本实施方式所述的一种可收放的水下机器人无线通讯装置,始终处于中性浮力姿态,可适配于各种水下机器人。通过通讯控制器9控制解锁上部多功能天线的锁止装置2,向绞盘6发送释放线缆信号,多功能天线凭借自身的浮力上浮到水面,读取多功能天线深度计读数和水下机器人深度读数,判定多功能天线是否到达水面。当多功能天线浮出(下潜)水面,装置总浮力降低(增加),为了保证水下机器人维持稳定的浮态,通过通讯控制器9进行浮力调节。液压马达以预设的速率将储存油箱浮力调节油囊中储存油压入浮力调节油囊储存油箱,当浮态受到扰动时由控制器继续调节,使浮力调节油囊变大(小),装置浮力变大(小),从而保证水下机器人的浮态稳定,完成释放装置中多功能天线的释放回收,可开始进行遥操作控制任务。
[0047]
具体实施方式二:参照图6具体说明本实施方式,本实施方式具体实施方式一所述的一种可收放的水下机器人无线通讯装置的通讯方法,包括以下步骤:
[0048]
s1:实时采集水下机器人发送给通讯控制器9的控制信息。
[0049]
s2:当控制信息为释放天线时,执行s3,当控制信息为回收天线时,执行s4。
[0050]
s3:通讯控制器9向锁止装置2发送锁止控制信号,使锁止装置2解锁。
[0051]
向绞盘6发送驱动信号,驱动绞盘6按照释放长度释放信号线缆5,使得天线1能够上浮至水面,所述释放长度为天线1位于水下的深度。
[0052]
向液压马达3发送驱动信号,使得液压马达3将储液箱7内的液体泵入储液囊4。
[0053]
其中,单位时间内储液箱7向储液囊4泵入液体的体积δv为:
[0054][0055]
其中,m为天线1的质量,ρ为水下机器人所在水域中水的密度,δv1为单位时间内天线1浸在水中的体积,其具体表达式为:
[0056]
δv1=∫sdl,
[0057]
其中,s为天线1水平面的横截面积,l为单位时间信号线缆5的释放长度,根据下式获得:
[0058][0059]
其中,c
d
为阻力系数,a为天线1运动过程中有效面积,t为信号线缆释放时间,v为天线1的整体体积,g为重力加速度。
[0060]
s4:通讯控制器9向液压马达3发送驱动信号,使得液压马达3将储液囊4内的液体泵入储液箱7。
[0061]
通讯控制器9向绞盘6发送驱动信号,驱动绞盘6回收信号线缆5,当绞盘6回收信号线缆5完毕时,执行s5。
[0062]
s5:通讯控制器9向锁止装置2发送锁止控制信号,控制锁止装置2将天线1锁定。本实施方式中,天线浮出水面,装置单位时间的浮力差为:
[0063]
δf=mg
‑
ρgδv1[0064]
浮力调节油囊所提供的单位时间浮力差为:
[0065]
δf=ρgδv。
[0066]
装置控制液压马达吸油速率由通讯控制器9控制,读取多功能天线深度和水下机
器人深度读数,判定多功能天线是否到达水面,如即将到达水面,进行浮力调节控制,天线形状已知,单位时间内多功能天线浮出水面的体积,质量已知,浮力差已知,预设马达喷油速度,当受到扰动浮态出现偏差再由pid控制器保证浮态稳定:
[0067][0068]
其中,u(t)为马达喷油速度,k
p
为比例系数,e(t)为当前位置与期望位置的误差,t
i
为积分时间,t
d
为微分时间常数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。