技术特征:
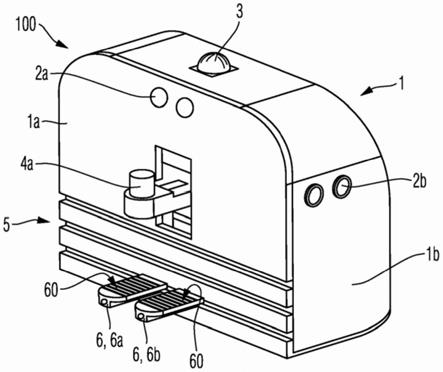
1.一种基于地面的无人运输车辆ugv(100;1000),包括:壳体(1;1001),所述壳体(1;1001)具有基板(1c;1001c)和大致与所述基板(1c;1001c)垂直的至少一个壳体侧壁(1a;1001a);至少一个车轮驱动器(10),至少一个所述车轮驱动器(10)布置在所述壳体(1;1001)中;至少一个车轮(13;130),至少一个所述车轮(13;130)联接至至少一个所述车轮驱动器(10)并且布置在所述基板(1c;1001c)中的凹部(1d;1001d)中;多个传感器(2a;2b;3),所述多个传感器(2a;2b;3)用于感测所述ugv(100:1000)的环境;控制器(15),所述控制器(15)基于所述多个传感器(2a;2b;3)的感测参数而用于所述ugv(100;1000)的自主定位和导航;以及至少一个载荷接收元件(6),至少一个所述载荷接收元件(6)联接至所述壳体侧壁(1a;1001a)并且从所述壳体侧壁(1a;1001a)向外延伸,至少一个所述载荷接收元件(6)包括用于相对于横向于所述基板(1c;1001c)延伸的竖向方向支承物品的载荷支承表面(60)。2.根据权利要求1所述的ugv(100;1000),其中,至少一个所述载荷接收元件(6)大致与所述基板(1c;1001c)平行地延伸。3.根据权利要求1或2所述的ugv(100;1000),其中,至少一个所述载荷接收元件(6)联接至所述壳体侧壁(1a;1001a)以便至少关于所述竖向方向相对于所述基板(1c;1001c)固定。4.根据前述权利要求中的任一项所述的ugv(100;1000),其中,至少一个所述载荷接收元件(6)以可拆卸地方式联接至所述壳体侧壁(1a;1001a)。5.根据权利要求4所述的ugv(100;1000),至少一个所述壳体侧壁(1a;1001a)包括至少一个t形轮廓或燕尾形的凹槽(5),所述凹槽(5)平行于所述基板(1c;1001c)延伸,并且所述凹槽(5)构造成以形状配合的方式接收至少一个所述载荷接收元件(6)的t形轮廓或燕尾形的舌状导轨。6.根据前述权利要求中的任一项所述的ugv(100;1000),其中,在至少一个所述壳体侧壁(1a;1001a)中布置有具有电动工具连接部的工具承载件(4a)。7.根据权利要求6所述的ugv(100;1000),还包括能够电动操作的吸盘(4b),所述吸盘(4b)连接至所述电动工具连接部。8.根据前述权利要求中的任一项所述的ugv(100;1000),其中,所述车轮驱动器(10)包括至少一个车轮悬架(14)和至少一个提升马达(11),其中,每个车轮(13)悬置在一个所述车轮悬架(14)上,并且其中,为每个车轮(13;130)提供至少一个所述提升马达(11),每个所述提升马达(11)运动学地联接至一个车轮(13;130),以便沿所述竖向方向相对于所述壳体(1;1001)偏转所述车轮(13;130)。9.根据权利要求8所述的ugv(100;1000),其中,至少一个所述车轮悬架(14)包括两个车轮悬架臂(14a;14b),所述两个车轮悬架臂(14a;14b)经由联接至为所述车轮(13)提供的两个所述提升马达(11)的两个锯齿螺纹杆(12)连接至所述壳体(1)。10.根据权利要求8或9所述的ugv(1000),其中,所述uvg(1000)包括至少两个车轮(13)和倾斜度传感器(8),所述倾斜度传感器(8)构造成捕获所述基板(1001c)相对于预先限定
的参照方向、即重力方向的倾斜度,其中,所述控制器(15)构造成控制联接至所述车轮(13)的所述提升马达(11),使得所述基板(1001a)相对于所述参照方向的所述倾斜度保持在预先限定的范围内。11.根据前述权利要求中的任一项所述的ugv(1000),其中,所述ugv(1000)恰好包括四个车轮(130),四个所述车轮(130)联接至四个车轮驱动器,各个车轮(13)布置在所述基板(1001c)中的一个凹部(1001d)中。12.根据权利要求1至9中的任一项所述的ugv(100),其中,所述ugv(100)恰好包括一个车轮(13),所述车轮(13)联接至所述车轮驱动器并且布置在所述基板(1c)中的所述凹部(1d)中。13.根据前述权利要求中的任一项所述的ugv(100;1000),所述控制器(15)具有无线通信模块(15a),一个ugv(100;1000)的控制器(15)配置成经由所述无线通信模块(15a)与另一ugv(100)的控制器(15)交换数据。14.一种无人运输系统(200),所述无人运输系统(200)包括多个根据权利要求13所述的ugv(100;1000),多个所述ugv(100)中的一个ugv(100)执行引导车辆的作用,并且所述引导车辆的控制器(15)经由无线通信连接至多个所述ugv(100)中的其余ugv(100)的控制器(15)并且设计成控制多个所述ugv(100)中的其余ugv(100)的运动。15.根据权利要求14所述的无人运输系统(200),还包括基站(210),所述基站(210)包括充电接口(220),其中,所述ugv(100;1000)包括电能存储装置(16)和ugv充电接口(120),所述ugv充电接口(120)配置成耦合至所述基站(210)的所述充电接口(220)以用于为所述电能存储装置(16)充电。16.一种用于运输物品的方法,例如运输飞行器的舱室建造物的方法,特别是通过使用协作作用的基于地面的无人运输车辆ugv(100;1000)群运输物品的方法,所述方法包括:将至少两个根据权利要求1至13中的任一项所述的ugv(100;1000)围绕物品的外周分布;通过使用所述ugv(100)的所述载荷接收元件(6)使物品升高;以及通过协作控制至少两个所述ugv(100)的所述车轮(13)来移动升高的物品。17.根据权利要求16所述的方法,至少两个所述ugv(100;1000)中的一个ugv(100;1000)执行引导车辆的作用,并且所述引导车辆的控制器(15)经由无线通信连接至多个所述ugv(100)中的其余ugv(100)的控制器(15)并且设计成控制至少两个其他的ugv(100;1000)的运动。18.根据权利要求16或17所述的方法,还包括:通过倾斜度传感器(8)捕获每个ugv(1000)的所述壳体(1)的所述基板(1c)相对于参照方向的倾斜度;控制每个ugv(100)的所述车轮(13)相对于所述基板(1001c)的偏转,使得所述基板(1001c)的所述倾斜度在预先限定的范围内;以及协作控制所有的ugv(1000)的所述车轮(13)相对于所述基板(1c)的偏转,使得所有的ugv(1000)的所述基板(1001c)定位在共同的平面中。19.根据权利要求16至18中的任一项所述的方法,所述方法用于在飞行器组件设施的总装线中运输盥洗室组件、乘客座椅组件或厨房。
技术总结
一种基于地面的无人运输车辆UGV,该基于地面的无人运输车辆包括壳体,该壳体具有基板和大致与基板的垂直的至少一个壳体侧壁。在壳体中布置有至少一个车轮驱动器,该车轮驱动器联接至至少一个车轮。车轮布置在基板中的凹部中。UGV还包括:多个传感器,所述多个传感器用于感测UGV的环境;以及控制器,该控制器基于多个传感器的感测参数用于UGV的自主定位和导航。UGV包括至少一个载荷接收元件,该载荷接收元件联接至壳体侧壁并且从壳体侧壁向外延伸,其中,载荷接收元件包括用于相对于横向于基板延伸的竖向方向支承物品的载荷支承表面。UGV适于与另一UGV交换数据以用于以协作的方式运输共同的有效载荷。输共同的有效载荷。输共同的有效载荷。
技术研发人员:克里斯蒂安
受保护的技术使用者:欧创德国股份两合公司
技术研发日:2020.02.26
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。