技术特征:
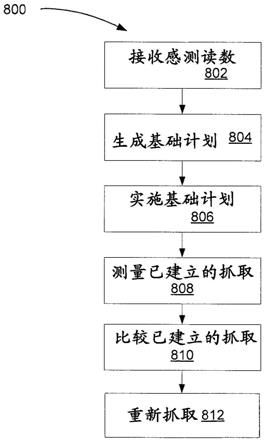
1.一种机器人系统的操作方法,包括:接收与目标物体相关联的传感器读数;生成用于对目标物体执行任务的基础计划,其中生成基础计划包括基于抓取点相对于指定区域、任务位置和另一个目标物体的位置确定用于抓取目标物体的抓取点和与抓取点相关联的一个或多个抓取模式;通过根据抓取模式排名操作致动单元和一个或多个吸附抓取器来实施用于执行任务的基础计划,以在目标物体上生成已建立的抓取,其中已建立的抓取位于与抓取模式相关联的抓取模式位置处;测量已建立的抓取;将已建立的抓取与力阈值进行比较;以及基于已建立的抓取低于力阈值而重新抓取目标物体。2.如权利要求1所述的方法,还包括基于迭代计数器低于迭代阈值而重新抓取目标物体。3.如权利要求1所述的方法,还包括基于迭代计数器超过迭代阈值而生成错误。4.如权利要求1所述的方法,还包括基于目标物体的质心来识别抓取点。5.如权利要求1所述的方法,还包括基于目标物体的质心和目标物体的表面轮廓、目标物体的表面的厚度、目标物体的表面的组成或其组合来识别抓取点。6.如权利要求1所述的方法,还包括基于吸盘的几何中心和权重因子来确定抓取模式位置。7.如权利要求1所述的方法,还包括:基于将目标物体与抓取模式位置对准并且确定抓取模式中的哪些抓取模式在抓取模式位置处用于使用与抓取模式相关联的所有吸附抓取器来抓取目标物体,从而生成抓取模式排名。8.如权利要求1所述的方法,还包括:在实施基础计划期间监视已建立的抓取;以及生成用于基于已建立的抓取低于力阈值来调节臂单元的速度和加速度的指令。9.一种机器人系统,包括:通信单元,被配置为:接收与目标物体相关联的传感器读数;控制单元,耦合到通信单元,被配置为:生成用于对目标物体执行任务的基础计划,其中生成基础计划包括基于抓取点相对于指定区域、任务位置和另一个目标物体的位置确定用于抓取目标物体的抓取点和与抓取点相关联的一个或多个抓取模式;通过根据抓取模式排名操作致动单元和一个或多个吸附抓取器来实施用于执行任务的基础计划以在目标物体上生成已建立的抓取,其中已建立的抓取位于与抓取模式相关联的抓取模式位置处;测量已建立的抓取;将已建立的抓取与力阈值进行比较;以及基于已建立的抓取低于力阈值而重新抓取目标物体。10.如权利要求9所述的系统,其中控制单元还被配置为基于迭代计数器低于迭代阈值
来重新抓取目标物体。11.如权利要求9所述的系统,其中控制单元还被配置为基于迭代计数器超过迭代阈值而生成错误。12.如权利要求9所述的系统,其中控制单元还被配置为基于目标物体的质心来识别抓取点。13.如权利要求9所述的系统,其中控制单元还被配置为基于目标物体的质心和目标物体的表面轮廓、目标物体的表面的厚度、目标物体的表面的组成或其组合来识别抓取点。14.如权利要求9所述的系统,其中控制单元还被配置为基于吸盘的几何中心和权重因子来确定抓取模式位置。15.如权利要求9所述的系统,其中控制单元还被配置为:基于将目标物体与抓取模式位置对准并且确定抓取模式中的哪些抓取模式在抓取模式位置处用于使用与抓取模式相关联的所有吸附抓取器来抓取目标物体,从而生成抓取模式排名。16.一种非瞬态计算机可读介质,包括用于机器人系统的指令,所述指令包括:接收与目标物体相关联的传感器读数;生成用于对目标物体执行任务的基础计划,其中生成基础计划包括基于抓取点相对于指定区域、任务位置和另一个目标物体的位置确定用于抓取目标物体的抓取点和与抓取点相关联的一个或多个抓取模式;通过根据抓取模式排名操作致动单元和一个或多个吸附抓取器来实施用于执行任务的基础计划以在目标物体上生成已建立的抓取,其中已建立的抓取位于与抓取模式相关联的抓取模式位置处;测量已建立的抓取;将已建立的抓取与力阈值进行比较;以及基于已建立的抓取低于力阈值而重新抓取目标物体。17.如权利要求16所述的非瞬态计算机可读介质,其中指令还包括基于目标物体的质心识别抓取点。18.如权利要求16所述的非瞬态计算机可读介质,其中指令还包括基于目标物体的质心和目标物体的表面轮廓、目标物体的表面的厚度、目标物体的表面的组成或其组合来识别抓取点。19.如权利要求16所述的非瞬态计算机可读介质,其中指令还包括基于吸盘的几何中心和权重因子来确定抓取模式位置。20.如权利要求16所述的非瞬态计算机可读介质,其中指令还包括:基于将目标物体与抓取模式位置对准并且确定抓取模式中的哪些抓取模式在抓取模式位置处用于使用与抓取模式相关联的所有吸附抓取器来抓取目标物体,从而生成抓取模式排名。
技术总结
公开了具有机器人臂吸附控制机制的机器人系统及其操作方法。一种机器人系统的操作系统和方法,包括:接收与目标物体相关联的传感器读数;生成用于对目标物体执行任务的基础计划,其中生成基础计划包括基于抓取点相对于指定区域、任务位置和另一个目标物体的位置确定用于抓取目标物体的抓取点和与抓取点相关联的一个或多个抓取模式;通过根据抓取模式排名操作致动单元和一个或多个吸附抓取器来实施用于执行任务的基础计划以在目标物体上生成已建立的抓取,其中已建立的抓取位于与抓取模式相关联的抓取模式位置处;测量已建立的抓取;将已建立的抓取与力阈值进行比较;以及基于已建立的抓取低于力阈值而重新抓取目标物体。体。体。
技术研发人员:出杏光鲁仙 D
受保护的技术使用者:牧今科技
技术研发日:2019.07.24
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。