1.本发明涉及计算机视觉领域,特别是涉及一种基于共焦二次曲线标定针孔摄像机的方法及系统。
背景技术:
2.计算机视觉可分为三个部分:图像特征的提取与处理,相关参数信息的计算,物体识别与三维重构,它的基本目的是根据若干幅场景的图像去获得三维场景中物体的形状、姿态、运动等结构信息。而摄像机标定是计算机视觉领域的关键技术之一,在二维图像平面上,像点的位置信息只与摄像机的内部结构和摄像机与场景的相对位置有关,一般称摄像机内部结构为内参数,称相对位置为外参数,而求解摄像机内参数和外参数的过程称为摄像机标定。在完成摄像机标定后,可以通过多视图几何原理来进行三维重构,从而恢复图像物体的三维信息,而摄像机标定的精度决定了恢复程度的好坏,因此研究摄像机标定具有重要意义。针孔摄像机模型通常称为线性模型,该模型成像简单,且具有固定的单一有效视点,因此被广泛研究。
3.在针孔摄像机标定发展过程中,最早出现的是摄像机自标定技术。有现有技术提出了一种不需要已知标定物形状的摄像机自标定方法,只需匹配图像序列之间的点对应,但算法比较复杂,难以实现。随着标定理论的成熟,后续出现了大量基于二次曲线的标定方法,其优点在于不用考虑点的匹配问题,与无穷远直线相交于绝对点,稳定性较好,在像平面易获取。有现有技术分析了同心圆的公共自极三角形性质,发现同心圆有无穷个公共自极三角形,且为直角三角形,该三角形两个点为无穷远点,另外一个点为圆心,由此提出了基于正交消失点和圆环点的像的两种标定方法。有现有技术以同心圆的投影的对偶为基础组成二次曲线束,讨论了同心圆的投影的代数约束和几何约束,进一步恢复了仿射结构和欧氏结构。有现有技术提出了一种利用同心圆的公切线性质求解圆心的像的算法,发现同心圆的公切线交于圆心,利用圆上的像点与圆心的像的连线可以构造正交消失点,进而标定摄像机,但是没有考虑二次曲线的情况。有现有技术分析了两条主轴对齐二次曲线的广义特征值分解,发现其中两个广义特征向量恰好是一对正交方向上的无穷远点,可以提供对绝对二次曲线的一个约束,并且通过求解绝对点的像可以获得绝对点的对偶的像,利用svd分解可以获得相差一个平移变换的投影矩阵,通过张氏标定法可以进一步求解外参,但该方法在二次曲线离心率未知时不适用。有现有技术进一步分析了二次曲线主轴平行的情况,利用绝对点的对偶是圆环点的对偶的一般形式,同样可以恢复欧氏结构,并讨论了两条同心二次曲线的组合,分析了秩为1和2的情况。还有现有技术分析了有心共焦二次曲线的代数性质,通过分析共焦二次曲线的性质和广义特征值,讨论了在已知实焦点的像、已知半轴乘积、未知其它信息三种情况下如何求解圆环点的对偶的像,但是没有考虑抛物线的情况。
技术实现要素:
4.本发明的目的是提供一种基于共焦二次曲线标定针孔摄像机的方法及系统,以提高摄像机内参数标定的准确性。
5.为实现上述目的,本发明提供了如下方案:
6.一种基于共焦二次曲线标定针孔摄像机的方法,包括:
7.获取针孔摄像机拍摄的多张靶标图像;
8.根据多张所述靶标图像确定共焦二次曲线的像的方程;
9.根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线;
10.根据所述消失线和所述共焦二次曲线的像的方程确定圆环点的像或正交消失点;
11.根据所述圆环点的像求解绝对二次曲线的像,或者根据所述正交消失点求解绝对二次曲线的像;
12.根据所述绝对二次曲线的像确定摄像机内参数。
13.可选的,所述根据多张所述靶标图像确定共焦二次曲线的像的方程,具体包括:
14.提取多张所述靶标图像的边缘点的像素坐标;
15.利用最小二乘法拟合所述边缘点的像素坐标得到共焦二次曲线的像的方程。
16.可选的,所述根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线,具体包括:
17.当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,通过位置确定消失线;
18.当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,通过叉乘确定消失线。
19.可选的,所述根据所述消失线和所述共焦二次曲线的像的方程确定圆环点的像或正交消失点,具体包括:
20.将所述消失线和所述共焦二次曲线的像的一对共轭复切线相交,确定圆环点的像;
21.当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,根据所述共焦椭圆的主轴的像与所述消失线的交点确定正交消失点;
22.当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,根据准线方向、所述共焦椭圆的像与消失线的切点确定正交消失点。
23.可选的,所述根据所述绝对二次曲线的像确定摄像机内参数,具体包括:
24.对所述绝对二次曲线的像进行cholesky分解再求逆,得到摄像机内参数矩阵;
25.根据所述摄像机内参数矩阵得到摄像机内参数。
26.一种基于共焦二次曲线标定针孔摄像机的系统,包括:
27.获取模块,用于获取针孔摄像机拍摄的多张靶标图像;
28.共焦二次曲线的像的方程确定模块,用于根据多张所述靶标图像确定共焦二次曲线的像的方程;
29.消失线确定模块,用于根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线;
30.圆环点的像或正交消失点确定模块,用于根据所述消失线和所述共焦二次曲线的
像的方程确定圆环点的像或正交消失点;
31.绝对二次曲线的像求解模块,用于根据所述圆环点的像求解绝对二次曲线的像,或者根据所述正交消失点求解绝对二次曲线的像;
32.摄像机内参数确定模块,用于根据所述绝对二次曲线的像确定摄像机内参数。
33.可选的,所述共焦二次曲线的像的方程确定模块,具体包括:
34.提取单元,用于提取多张所述靶标图像的边缘点的像素坐标;
35.拟合单元,用于利用最小二乘法拟合所述边缘点的像素坐标得到共焦二次曲线的像的方程。
36.可选的,所述消失线确定模块,具体包括:
37.位置确定单元,用于当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,通过位置确定消失线;
38.叉乘确定单元,用于当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,通过叉乘确定消失线。
39.可选的,所述圆环点的像或正交消失点确定模块,具体包括:
40.圆环点的像确定单元,用于将所述消失线和所述共焦二次曲线的像的一对共轭复切线相交,确定圆环点的像;
41.第一正交消失点确定单元,用于当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,根据所述共焦椭圆的主轴的像与所述消失线的交点确定正交消失点;
42.第二正交消失点确定单元,用于当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,根据准线方向、所述共焦椭圆的像与消失线的切点确定正交消失点。
43.可选的,所述摄像机内参数确定模块,具体包括:
44.cholesky分解和求逆单元,用于对所述绝对二次曲线的像进行cholesky分解和求逆,得到摄像机内参数矩阵;
45.摄像机内参数确定单元,用于根据所述摄像机内参数矩阵得到摄像机内参数。
46.根据本发明提供的具体实施例,本发明公开了以下技术效果:
47.本发明提供的一种基于共焦二次曲线标定针孔摄像机的方法及系统,根据多张所述靶标图像确定共焦二次曲线的像的方程;根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线;根据所述消失线和所述共焦二次曲线的像的方程确定圆环点的像或正交消失点;根据所述圆环点的像求解绝对二次曲线的像,或者根据所述正交消失点求解绝对二次曲线的像;根据所述绝对二次曲线的像确定摄像机内参数。本发明提供的方法可以提高曲线拟合的精确度,从而提高标定精度。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
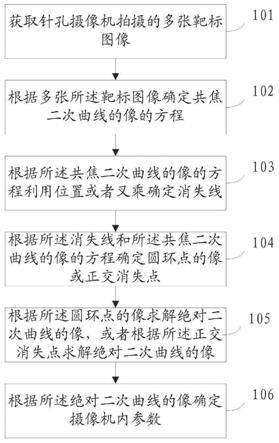
49.图1为本发明提供的一种基于共焦二次曲线标定针孔摄像机的方法流程图;
50.图2为用靶标在针孔摄像机下的投影示意图;
51.图3为共焦椭圆在空间平面上的示意图;
52.图4为共焦抛物线在空间平面上的示意图;
53.图5为有心共焦二次曲线的像在图像平面上的示意图;
54.图6为无心共焦二次曲线的像在图像平面上的示意图;
55.图7为实验模板示意图。
具体实施方式
56.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
57.本发明的目的是提供一种基于共焦二次曲线标定针孔摄像机的方法及系统,以提高摄像机内参数标定的准确性。
58.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
59.如图1所示,本发明提供的一种基于共焦二次曲线标定针孔摄像机的方法,包括:
60.步骤101:获取针孔摄像机拍摄的多张靶标图像。
61.步骤102:根据多张所述靶标图像确定共焦二次曲线的像的方程。其中,步骤102,具体包括:
62.提取多张所述靶标图像的边缘点的像素坐标。
63.利用最小二乘法拟合所述边缘点的像素坐标得到共焦二次曲线的像的方程。
64.步骤103:根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线。其中,步骤103,具体包括:
65.当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,通过位置确定消失线。
66.当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,通过叉乘确定消失线。
67.步骤104:根据所述消失线和所述共焦二次曲线的像的方程确定圆环点的像或正交消失点。其中,步骤104,具体包括:
68.将所述消失线和所述共焦二次曲线的像的一对共轭复切线相交,确定圆环点的像。
69.或者,当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,根据所述共焦椭圆的主轴的像与所述消失线的交点确定正交消失点。当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,根据准线方向、所述共焦椭圆的像与消失线的切点确定正交消失点。
70.步骤105:根据所述圆环点的像求解绝对二次曲线的像,或者根据所述正交消失点求解绝对二次曲线的像。
71.步骤106:根据所述绝对二次曲线的像确定摄像机内参数。
72.其中,步骤106,具体包括:
73.对所述绝对二次曲线的像进行cholesky分解再求逆,得到摄像机内参数矩阵。
74.根据所述摄像机内参数矩阵得到摄像机内参数。
75.本发明提供了一种制作简单,稳定性好的利用靶标求解针孔摄像机内参数的方法,该靶标由空间中两条共焦二次曲线构成。在射影空间中,根据是否存在中心,可将共焦二次曲线分为有心共焦二次曲线和无心共焦二次曲线,前者一般指椭圆和双曲线,后者为抛物线,本发明是利用空间中两条共焦二次曲线作为靶标来求解针孔摄像机内参数的方法。首先,用针孔摄像机从不同位置拍摄含有两个共焦椭圆和共焦抛物线的图像,从图像中提取靶标图像边缘点,使用最小二乘法拟合获得像的方程,利用共焦二次曲线中心的像的性质加以区分。在对偶空间中获得共焦二次曲线的像的对偶,从而得到它们的公切线。对于椭圆的像,通过判断位置关系区分出消失线,利用消失线和一组共轭复切线相交得到圆环点的像,也可以求解消失线和主轴的像的交点得到一对正交消失点。对于抛物线,通过判断叉乘是否为零区分消失线,利用消失线和一组共轭复切线相交得到圆环点的像,根据完全四点形的调和共轭性和拉盖尔定理获得两组正交消失点。利用圆环点的像或者正交消失点与绝对二次曲线的像的约束,可以求解针孔摄像机内参数。利用圆环点的像求解需要拍摄三幅图片,利用正交消失点求解至少需要拍摄五幅图片。具体分为以下步骤:
76.1.拟合靶标投影方程
77.利用matlab平台上的edge函数提取靶标图像边缘点的像素坐标,利用最小二乘法拟合获得靶标投影方程。
78.2.获得消失线
79.设平面π1上的两条共焦二次曲线q1,q2在像平面上的投影为c1,c2,取q1上任意一点p,则p与其像点p之间满足λ
p
p=k[r t]p,λ
p
为p点投影的比例因子,k为摄像机内参数矩阵,记作其中f
u
,f
v
表示像平面上u轴和v轴上的尺度因子,s为倾斜因子,u0和v0为摄像机的主点坐标,r和t分别表示世界坐标系与摄像机坐标系的旋转和平移,其中f
u
,f
v
,s,u0,v0为针孔摄像机的5个内参数。
[0080]
利用matlab平台中的edge函数提取出每幅图像中的靶标图像边缘点的像素坐标,利用最小二乘法拟合得到共焦二次曲线的像的方程,由于符号较多,这里以其中一幅图片为例。为简化表示,相同的符号既表示曲线,也表示其对应的系数矩阵,对于共焦椭圆的像c1,c2,通过位置判断区分出消失线,对于共焦抛物线像c3,c4,通过判断叉乘是否为零区分出消失线。
[0081]
3.获得圆环点的像或者正交消失点
[0082]
获得消失线后,将消失线与椭圆或者抛物线的像的一对共轭复切线相交,得到圆环点的像;对于椭圆像c1,c2,求解q1,q2的两条主轴的像与消失线的交点得到一组正交消失点,对于抛物线像c3,c4,求解c3,c4与消失线的切点以及准线方向上的消失点,可得两组正交消失点。
[0083]
4.求解绝对二次曲线的像
[0084]
利用圆环点的像或者正交消失点与绝对二次曲线的像的约束关系可以求解绝对二次曲线的像ω,利用圆环点的像或正交消失点求解至少需要拍摄三幅图片。
[0085]
5.求解针孔摄像机内参数
[0086]
绝对二次曲线的像ω与针孔摄像机内参数矩阵k满足ω=k
‑
t
k
‑1,对ω进行cholesky分解再求逆得到内参数矩阵k,从而获得针孔摄像机5个内参数。其中,k
‑
t
为内参数矩阵k的逆的转置。
[0087]
作为一个实施例,本发明的靶标由空间中两条共焦二次曲线构成,在求解针孔摄像机内参数过程中,使用针孔摄像机拍摄靶标至少三幅图像便可线性求解出针孔摄像机的5个内参数,具体步骤如下:
[0088]
1.拟合靶标投影方程
[0089]
利用matlab程序中的edge函数提取靶标图像边缘点的像素坐标,并用最小二乘法拟合获得靶标投影方程。
[0090]
2.获得消失线
[0091]
设o
c
‑
x
c
y
c
z
c
为摄像机坐标系,o
w
‑
x
w
y
w
z
w
为世界坐标系,平面共焦二次曲线在针孔摄像机下的投影示意图如图2所示,满足λc=h
‑
t
qh
‑1,其中λ为二次曲线q投影的比例因子,c为共焦二次曲线的像,h为二次曲线所在支撑平面π1到像平面π的投影矩阵,h
‑
t
为h的逆的转置,q为共焦二次曲线。如图3所示,设q1,q2为平面π1上的两条有心共焦二次曲线,与无穷远直线l
∞
相离,相交于一对共轭虚交点。平面π1与平面z=0重合,令二次曲线中心与原点重合,长轴与x轴重合,则q1其矩阵表达式记作:
[0092][0093]
其中a和c分别为二次曲线的长轴和焦距,且c>0,为短轴,它的实焦点坐标为m=[
‑
c 0 1]
t
,m'=[c 0 1]
t
,位于长轴l
m
上,虚焦点坐标为n=[0 ci 1]
t
,n'=[0
ꢀ‑
ci 1]
t
,其中i为虚数,位于短轴l
n
上,长轴和短轴相互垂直。ci为c与i的乘积。通过将实焦点m,m'代入到l
n
和l
∞
的直线方程中,发现小于零,而得出两个实焦点位于短轴l
n
的两侧,而位于无穷远直线l
∞
的一侧。
[0094]
在图3和图4中,都存在无穷远直线l
∞
,从图中可以看出,图3中l
∞
与椭圆q1,q2相交于一对共轭虚点,也就是绝对点,图中没有标出;图4中l
∞
与抛物线q3,q4相切于两个实点v
1∞
和v
2∞
,这是图3和图4中最大的区别。图5和图6分别是图3和图4的投影,保持射影不变性,位置关系仍然成立。
[0095]
将有心共焦二次曲线q1,q2的对偶记作q1,q2的公切线是的元素,则有:
[0096]
将q1,q2的四条公切线记作l
i
(i=1~4),与无穷远直线l
∞
相交于圆环点i,j,将q1,q2投影记作c1,c2,如图5所示,在像平面π上,c1,c2公切线满足:
[0097][0098]
将c1,c2的四条公切线l
i
(i=1~4)交点记作:
[0099]
v
j
=l
i
×
l
i 1
ꢀꢀꢀ
(4)
[0100]
通过排列组合v
j
有6种情况。两对共轭公切线(l1,l2)和(l3,l4)的交点分别记作v1和v2,即为(l1,l2)和(l3,l4)的交点m,m'的像m,m',位于长轴的像l
m
上。将l1与l3,l2与l4,l1与l4,l2与l3的交点分别记作v3,v4,v5,v6。由共焦二次曲线的性质可知,在(v3,v4)和(v5,v6)这两组交点中,其中一组为圆环点的像,另外一组为虚焦点的像,记l5=v3×
v4,l6=v5×
v6为(v3,v4)和(v5,v6)的连线。由于实焦点的像在短轴的像的两侧,在消失线的同一侧,通过将v1,v2代入到l5的直线方程中,若则消失线为l5,否则为l6,将消失线记作l
∞
,短轴记作l
n
。
[0101]
如图4所示,设q3,q4为平面π1上两条抛物线,它们分别与无穷远直线l
∞
相切与一个实交点,记作v
1∞
和v
2∞
,它们的公共焦点为m1,对应的准线aa1和bb1分别位于直线l
a
和l
b
上,且l
a
,l
b
与无穷远直线的交点为v
3∞
,v
4∞
。四条公切线中两条为一对共轭复直线,记作l
i
和l
j
,与无穷远直线相交于圆环点i,j,另外两条为重合的无穷远直线记作l
∞
,通过判断叉乘是否为零可以区分出l
∞
。将q3,q4投影记作c3,c4,如图6所示,在像平面π上,由射影不变性可知,c3,c4与消失线l
∞
相切于v
1∞
和v
2∞
,由(3)式可求解c4,c4的公切线。其四条公切线中,一对重合切线为消失线,记为l
∞
,另外一对公切线为共轭复直线,记为l
i
和l
j
,相交于焦点的像m1,且与消失线l
∞
分别相交于圆环点的像m
i
和m
j
。准线的像aa1和bb1分别位于直线l
a
和l
b
上,与消失线l
∞
相交于v
3∞
和v
4∞
。通过判断叉乘是否为0可以将l
∞
区分出来。
[0102]
3.求解圆环点的像或者正交消失点
[0103]
如图5,对于有心共焦二次曲线的像c1,c2,求解其任意一组共轭复切线与消失线l
∞
的交点,即为圆环点的像,求解消失线l
∞
与主轴的像l
m
和l
n
的交点获得一对正交消失点v
m
,v
n
,如下所示:
[0104][0105]
如图6,对于无心共焦二次曲线c3,c4,利用其共轭复切线l
i
,l
j
和消失线l
∞
相交得到圆环点的像,记作:
[0106][0107]
c3,c4与消失线相切于两个消失点v
1∞
,v
2∞
,满足:
[0108][0109][0110]
其焦点的像m1满足:
[0111]
m1=l
i
×
l
j
ꢀꢀꢀ
(9)
[0112]
由极点极线关系可以求解两条准线的像l
a
,l
b
:
[0113][0114]
通过求解l
a
,l
b
与消失线l
∞
的交点得到v
3∞
,v
4∞
:
[0115]
v
3∞
=l
a
×
l
∞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0116]
v
4∞
=l
b
×
l
∞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0117]
由完全四点形aa1ji和bb1ji的调和性和拉盖尔定理推论可知,其公共边l
∞
上存在两组正交方向的无穷远点,由射影不变性可知,v
1∞
,v
3∞
和v
2∞
,v
4∞
是两组正交消失点。
[0118]
4.求解绝对二次曲线的像
[0119]
因为q1和q2,q3和q4位于同一平面上,所求的圆环点的像m
i
,m
j
相同,圆环点的像位于绝对二次曲线的像ω上,则有:
[0120][0121]
因为m
i
,m
j
是一对共轭复点,因此只对ω提供两个约束,即:
[0122][0123]
其中,re和im表示取公式中的实部和虚部,三幅图片提供关于ω的六个约束,通过svd分解求解ω。
[0124]
由正交消失点与绝对二次曲线的像ω满足:
[0125][0126][0127][0128]
因此对于有心共焦二次曲线,五幅图片提供对ω的五个约束,对于无心共焦二次曲线,三幅图片提供对ω的六个约束,通过svd分解可求解ω。
[0129]
5.求解摄像机内参数
[0130]
绝对二次曲线的像ω与针孔摄像机内参数矩阵k满足ω=k
‑
t
k
‑1,对ω进行cholesky分解再求逆得到内参数矩阵k,从而获得针孔摄像机5个内参数。
[0131]
作为一个实施例,本发明采用的实验模板示意图如图7所示,其中图7(a)为椭圆实验模板示意图,图7(b)为抛物线实验模板示意图。基于共焦二次曲线标定针孔摄像机采用的实验模板是共面的两条共焦椭圆和共焦抛物线。利用本发明中的方法来标定针孔摄像机,其具体步骤如下:
[0132]
1.拟合靶标的投影方程
[0133]
本发明利用针孔摄像机拍摄靶标的5幅图像,读入图像。利用matlab中的edge函数提取靶标图像边缘点的像素坐标,并利用最小二乘法拟合获得共焦二次曲线的像的方程,这里用c
n1
和c
n2
表示第n(n=1,2,
…
,5)幅图像中的两条共焦椭圆的系数矩阵,c
n3
和c
n4
表示第n(n=1,2,3)幅图像中的两条共焦抛物线的系数矩阵,结果如下:
[0134][0135][0136][0137][0138][0139][0140][0141][0142][0143][0144][0145]
[0146][0147][0148][0149][0150]
2.获得消失线
[0151]
因为q1和q2,q3和q4位于同一平面上,因此所求消失线相同,通过共焦二次曲线公切线性质可以判断出消失线,将五幅图片中的消失线的齐次线坐标矩阵分别记作l
n∞
(n=1,2,
…
,5),可得:
[0152]
l
1∞
=[
‑
0.001576096650242 0.000891226344602 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(34)
[0153]
l
2∞
=[
‑
0.000596434214352
ꢀ‑
0.000034228805877 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(35)
[0154]
l
3∞
=[
‑
0.000277652722623
ꢀ‑
0.0005450184685501]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(36)
[0155]
l
4∞
=[
‑
0.001073080263935
ꢀ‑
0.000124870114277 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(37)
[0156]
l
5∞
=[0.006502239658000
ꢀ‑
0.0051308826738261]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(38)
[0157]
3.获得圆环点的像或者正交消失点
[0158]
利用消失线和共轭复切线相交可以得到圆环点的像m
1i
和m
1j
,用m
ni
和m
nj
表示第n(n=1,2,3)幅图像中圆环点的像的齐次坐标矩阵,其中坐标中的i表示复数,如下所示:
[0159][0160][0161][0162]
[0163][0164][0165]
求解正交消失点,将利用共焦椭圆求出的五对正交消失点记作如下:
[0166]
v
1m
=[1428.135183943206 1403.548141369801 1]
t
ꢀꢀꢀ
(45)
[0167]
v
1n
=[427.4237735895693
ꢀ‑
366.1682850690036 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(46)
[0168]
v
2m
=[1549.956902816710 2207.283323271339 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(47)
[0169]
v
2n
=[1732.305092911781
ꢀ‑
970.1193558313195 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(48)
[0170]
v
3m
=[1229.420432816443 1208.487615715997 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(49)
[0171]
v
3n
=[
‑
3252.130774120768 3491.556843607697 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(50)
[0172]
v
4m
=[812.3110955605783 1027.667796420715 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(51)
[0173]
v
4n
=[1068.687076451496
ꢀ‑
1175.517544075917 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(52)
[0174]
v
5m
=[878.7094273063829 1308.464783328090 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(53)
[0175]
v
5n
=[
‑
203.9133729357064
ꢀ‑
63.51609284726921 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(54)
[0176]
利用前三幅图片中共焦抛物线求出六对正交消失点,用v
n1
和v
n3
,v
n2
和v
n3
表示第n(n=1,2,3)幅图像中的两对正交消失点,如下所示:
[0177]
v
11
=[669.8074282172780 62.4771072557840 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(55)
[0178]
v
13
=[199.5643030199445
ꢀ‑
769.1282631552055 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(56)
[0179]
v
21
=[1549.956908402741 2207.283225935183 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(57)
[0180]
v
22
=[1878.035542712339
ꢀ‑
3509.460828766771 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(58)
[0181]
v
23
=[1584.783320405642 1600.435772478928 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(59)
[0182]
v
24
=[1500.142285919463 3075.299052439041 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(60)
[0183]
v
31
=[1229.420508234093 1208.487577295436 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(61)
[0184]
v
32
=[968.134438246694 1341.596440392121 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(62)
[0185]
v
n3
=[7689.338205002919
ꢀ‑
2082.435281150562 1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(63)
[0186]
v
34
=[1496.640524812950 1072.3557406261321]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(64)
[0187]
4.确定绝对二次曲线的像
[0188]
对于圆环点的像,将(39)式到(44)式代入到(14)式中,建立关于ω的线性约束方程,对方程组进行svd分解,可得ω的系数矩阵,结果如下:
[0189][0190]
对于共焦椭圆求出的五对正交消失点,建立关于ω的线性约束方程,对方程组进行svd分解,可得ω的系数矩阵,结果如下:
[0191][0192]
对于共焦抛物线求出的六对正交消失点,建立关于ω的线性约束方程,对方程组进行svd分解,可得ω的系数矩阵,结果如下:
[0193][0194]
5.求解针孔摄像机内参数
[0195]
根据约束ω=k
‑
t
k
‑1,对(65)式中ω进行cholesky分解再求逆得到内参数矩阵k,结果如下:
[0196][0197]
故针孔摄像机的5个内参数分别为:f
u
=799.9999999996533,f
v
=849.9999999995438,s=0.2000000003413,u0=399.9999999995597,v0=349.9999999996217。
[0198]
对(66)式中的ω进行cholesky分解再求逆得到内参数矩阵k,结果如下:
[0199][0200]
故针孔摄像机的5个内参数分别为:f
u
=800.0000000000920,f
v
=850.0000000001444,s=0.1999999999137,u0=400.0000000001802,v0=350.0000000001015。
[0201]
对(67)式中的ω进行cholesky分解再求逆得到内参数矩阵k,结果如下:
[0202][0203]
故针孔摄像机的5个内参数分别为:f
u
=799.9999999998992,f
v
=849.9999999999362,s=0.2000000000686519,u0=399.9999999999671,v0=349.9999999999783。
[0204]
本发明还提供了一种基于共焦二次曲线标定针孔摄像机的系统,包括:
[0205]
获取模块,用于获取针孔摄像机拍摄的多张靶标图像。
[0206]
共焦二次曲线的像的方程确定模块,用于根据多张所述靶标图像确定共焦二次曲线的像的方程。
[0207]
其中,所述共焦二次曲线的像的方程确定模块,具体包括:
[0208]
提取单元,用于提取多张所述靶标图像的边缘点的像素坐标。
[0209]
拟合单元,用于利用最小二乘法拟合所述边缘点的像素坐标得到共焦二次曲线的
像的方程。
[0210]
消失线确定模块,用于根据所述共焦二次曲线的像的方程利用位置或者叉乘确定消失线。
[0211]
其中,所述消失线确定模块,具体包括:
[0212]
位置确定单元,用于当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,通过位置确定消失线。
[0213]
叉乘确定单元,用于当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,通过叉乘确定消失线。
[0214]
圆环点的像或正交消失点确定模块,用于根据所述消失线和所述共焦二次曲线的像的方程确定圆环点的像或正交消失点。
[0215]
其中,所述圆环点的像或正交消失点确定模块,具体包括:
[0216]
圆环点的像确定单元,用于将所述消失线和所述共焦二次曲线的像的一对共轭复切线相交,确定圆环点的像。
[0217]
第一正交消失点确定单元,用于当所述共焦二次曲线的像的方程为共焦椭圆的像的方程时,根据所述共焦椭圆的主轴的像与所述消失线的交点确定正交消失点。
[0218]
第二正交消失点确定单元,用于当所述共焦二次曲线的像的方程为共焦抛物线的像的方程时,根据准线方向、所述共焦椭圆的像与消失线的切点确定正交消失点。
[0219]
绝对二次曲线的像求解模块,用于根据所述圆环点的像求解绝对二次曲线的像,或者根据所述正交消失点求解绝对二次曲线的像。
[0220]
摄像机内参数确定模块,用于根据所述绝对二次曲线的像确定摄像机内参数。其中,所述摄像机内参数确定模块,具体包括:
[0221]
cholesky分解和求逆单元,用于对所述绝对二次曲线的像进行cholesky分解和求逆,得到摄像机内参数矩阵。
[0222]
摄像机内参数确定单元,用于根据所述摄像机内参数矩阵得到摄像机内参数。
[0223]
本发明具有以下优势:
[0224]
(1)该靶标制作简单,只需两条共焦二次曲线。
[0225]
(2)对该靶标的物理尺度没有要求,无需知道二次曲线中心在世界坐标系下的坐标。
[0226]
(3)该靶标的图像边界点几乎可以全部提取,从而提高曲线拟合的精确度和标定精度。
[0227]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0228]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。