1.本发明涉及农机技术领域,特别是涉及一种小型智能化柑橘采摘装置。
背景技术:
2.柑橘是全球最重要的经济作物之一,在全球范围内都有大规模种植,是世界第一大类水果,是世界第三大贸易农产品。我国是柑橘的重要原产地之一,柑橘资源丰富,品种繁多,产量惊人。除食用之外,柑橘在药用方面的需求量也很大,拥有很大的商业价值。
3.传统的柑橘采摘都是由人工完成,虽然人工采摘能够有效地减少果实的损伤程度和保证果实的均匀度,但是人工采摘劳动力需求大,且采摘效率低,特别是随着中国城镇化建设的逐渐发展,农村劳动力大量地向城市转移,出现农村劳动力严重的紧缺现象,种种原因导致人工采摘柑橘的成本费用不断地上升。针对于此,市面上出现了各种各样的采摘装置,但现有的采摘装置采摘的柑橘均带有果柄,果柄太长易将与其靠近的柑橘戳伤,从而导致汁液流出,缩短了保存时间。
技术实现要素:
4.本发明主要目的在于提供一种小型智能化柑橘采摘装置,以解决上述问题。
5.为达上述目的,本发明提供一种小型智能化柑橘采摘装置,包括行走机构、机械臂和采摘机构;所述机械臂设置于行走机构上,所述机械臂末端与采摘机构连接;
6.所述采摘机构包括底板、固定半球和移动半球;所述固定半球与底板一侧固定连接,所述移动半球与底板滑动连接;所述固定半球和移动半球同轴设置;所述底板另一侧设置有用于驱动移动半球往复运动的驱动装置;所述固定半球或移动半球的边缘上均匀设置有多个凸齿,所述凸齿之间的距离大于柑橘果柄直径,凸齿长度大于柑橘果柄直径;所述凸齿两侧均设置有第一刀刃。
7.进一步的,所述底板上远离固定半球的一侧滑动设置有底座;所述底座上设置有两个滑孔;所述底板上设置有两个与滑孔相适配的滑杆;所述滑杆上套设有弹簧;所述弹簧一端与滑杆末端连接,另一端与底座抵接;所述底座与机械臂末端连接;所述底座上设置有向固定半球方向伸出的齿条;所述固定半球的球底通过轴承转动设置有转轴;所述转轴上固定连接有齿轮和环形刮刀;所述齿轮与所述齿条相适配;所述环形刮刀初始位置靠近底板且远离齿条。
8.进一步的,所述环形刮刀上设置有第二刀刃。
9.进一步的,所述齿条下方设置有齿条支撑导向板;所述齿条支撑导向板与固定半球或底板固定连接。
10.进一步的,所述驱动装置包括电缸;所述电缸输出端固定连接有转接板;所述移动半球的球底固定设置有推杆;所述推杆与转接板固定连接。
11.进一步的,所述底板上设置有滑轨,所述移动半球上设置有与滑轨相适配的滑槽。
12.进一步的,所述机械臂包括旋转装置;所述旋转装置与行走机构固定连接;所述旋
转装置的输出端连接有第一支臂;所述第一支臂通过第一关节电机连接有第二支臂;所述第二支臂通过第二关节电机连接有第三支臂;所述第三支臂通过第三关节电机连接有第四支臂;所述第四支臂与底座固定连接。
13.进一步的,还包括收集装置;所述收集装置包括收集箱、柔性接料管和接料管支架;所述收集箱设置于行走机构上,所述柔性接料管一端与收集箱连接,另一端与接料管支架连接;所述接料管支架位于采摘机构下方,且与第四支臂固定连接。
14.进一步的,所述行走机构内设置有电池和控制机构;所述电池为整个装置提供电力;所述控制机构用于控制整个装置的动作。
15.本发明通过固定半球和移动半球的配合将柑橘包住,柑橘的果柄卡设于凸齿之间,通过机械臂拖拽,使柑橘紧贴固定半球和移动半球,果柄完全外漏,通过凸齿上的第一刀刃对果柄根部进行剪切,有效降低柑橘戳伤的风险。拖拽的同时,底座和底板相对滑动,进而使齿条带动齿轮旋转,带动环形刮刀辅助切割,实现对果柄的双向切割;由于切割位置不同,果柄受到径向剪切力,实现果柄软化。
附图说明
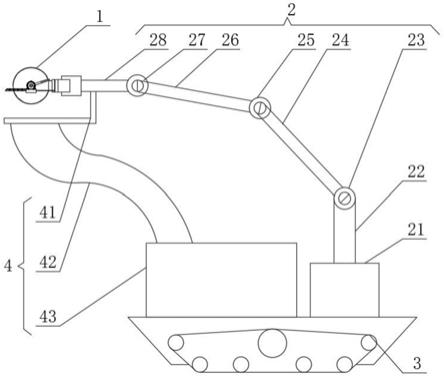
16.图1为本发明一种小型智能化柑橘采摘装置整体示意图。
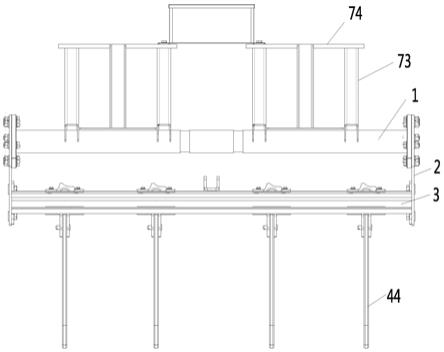
17.图2为本发明一种小型智能化柑橘采摘装置的采摘机构打开状态示意图。
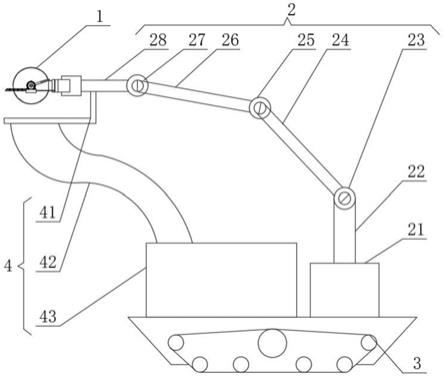
18.图3为本发明一种小型智能化柑橘采摘装置的采摘机构闭合状态示意图。
19.其中,1
‑
采摘机构;2
‑
机械臂;3
‑
行走机构;4
‑
收集装置;11
‑
移动半球;12
‑
固定半球;13
‑
底板;14
‑
驱动装置;15
‑
底座;21
‑
旋转装置;22
‑
第一支臂;23
‑
第一关节电机;24
‑
第二支臂;25
‑
第二关节电机;26
‑
第三支臂;27
‑
第三关节电机;28
‑
第四支臂;41
‑
接料管支架;42
‑
柔性接料管;43
‑
收集箱;121
‑
凸齿;122
‑
齿轮;123
‑
转轴;124
‑
环形刮刀;131
‑
滑轨;132
‑
滑杆;133
‑
弹簧;141
‑
电缸;142
‑
转接板;143
‑
推杆;151
‑
齿条;152
‑
齿条支撑导向板。
具体实施方式
20.为达成上述目的及功效,本发明所采用的技术手段及构造,结合附图就本发明较佳实施例详加说明其特征与功能。
21.如图1
‑
3所示,本发明中提供了一种小型智能化柑橘采摘装置,包括:
22.行走机构3、机械臂2和采摘机构1;所述机械臂2设置于行走机构3上,所述机械臂2末端与采摘机构1连接;
23.所述采摘机构1包括底板13、固定半球12和移动半球11;所述固定半球12与底板13一侧固定连接,所述移动半球11与底板13滑动连接;所述底板13上设置有滑轨131,所述移动半球11上设置有与滑轨131相适配的滑槽;所述固定半球12和移动半球11同轴设置;所述底板13另一侧设置有用于驱动移动半球往复运动的驱动装置14;所述固定半球12或移动半球11的边缘上均匀设置有多个凸齿121,本实施例中,凸齿121设置于固定半球12边缘;所述凸齿121之间的距离大于柑橘果柄直径,凸齿121长度大于柑橘果柄直径;所述凸齿121两侧均设置有第一刀刃。
24.在另一实施例中,所述底板13上远离固定半球12的一侧滑动设置有底座15;所述底座15上设置有两个滑孔;所述底板13上设置有两个与滑孔相适配的滑杆132;所述滑杆
132上套设有弹簧133;所述弹簧133一端与滑杆132末端连接,另一端与底座15抵接;所述底座15与机械臂2末端连接;所述底座15上设置有向固定半球12方向伸出的齿条151;所述固定半球12的球底通过轴承转动设置有转轴123;所述转轴123上固定连接有齿轮122和环形刮刀124;所述齿轮122与所述齿条151相适配;所述环形刮刀124初始位置靠近底板13且远离齿条151。所述环形刮刀124上设置有第二刀刃。
25.在另一实施例中,所述齿条151下方设置有齿条支撑导向板152;所述齿条支撑导向板152与固定半球12或底板13固定连接;本实施例中,齿条支撑导向板152与固定半球12固定连接。
26.在另一实施例中,所述驱动装置14包括电缸141;所述电缸141输出端固定连接有转接板142;所述移动半球11的球底固定设置有推杆143;所述推杆143与转接板142固定连接。
27.在另一实施例中,所述机械臂2包括旋转装置21;所述旋转装置21与行走机构3固定连接;所述旋转装置21的输出端连接有第一支臂22;所述第一支臂22通过第一关节电机23连接有第二支臂24;所述第二支臂24通过第二关节电机25连接有第三支臂26;所述第三支臂26通过第三关节电机27连接有第四支臂28;所述第四支臂28与底座15固定连接。
28.在另一实施例中,还包括收集装置4;所述收集装置包括收集箱43、柔性接料管42和接料管支架41;所述收集箱43设置于行走机构3上,所述柔性接料管42一端与收集箱43连接,另一端与接料管支架41连接;所述接料管支架41位于采摘机构1下方,且与第四支臂28固定连接。
29.在另一实施例中,所述行走机构3内设置有电池和控制机构;所述电池为整个装置提供电力;所述控制机构用于控制整个装置的动作。
30.使用时,通过控制机构控制行走机构3行走至柑橘树下;控制机械臂2运动,使采摘机构1到达柑橘处,使柑橘位于固定半球12与移动半球11之间;控制电缸141收缩,使移动半球11向固定半球12靠拢、结合;通过固定半球12和移动半球11的配合将柑橘包住,柑橘的果柄卡设于凸齿121之间;然后控制机械臂2向下运动或控制行走机构3向后运动,对柑橘进行拖拽;使柑橘紧贴固定半球12和移动半球11,果柄完全外漏,通过凸齿121上的第一刀刃对果柄根部进行剪切;拖拽的同时,底座15和底板13相对滑动,进而使齿条151带动齿轮122旋转,带动环形刮刀124辅助切割,实现对果柄的双向切割;由于切割位置不同,果柄收到径向剪切力,实现果柄软化。
31.以上所述仅为本发明较佳实施例而已,非全部实施例,任何人应该得知在本发明的启示下做出的结构变化,凡是与本发明具有相同或者相近似的技术方案,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。