1.本发明属于高空线缆剪切技术领域,尤其是一种基于远程遥控的高空线缆剪切装置。
背景技术:
2.近年来,得益于各项无人机相关的智能化技术与设备的提升,电力巡线由传统人工为主到现在人机(无人机)协同,无人机逐渐被运维人员接受。无人机因其具备成本低、操作简单、机动性高、视野大、巡检范围广、巡检效率高、便捷运输且风险性低等优点,使得其已在电力巡检、国土资源调查、应急救灾、城市规划等诸多领域中得到了突破性的运行与发展,在电力、光伏、交通等多个行业的投入应用也取得了显著效果。无人机与人工巡检方式协同配合,是智能运检的发展方向。带电作业是确保电力不间断供的重要需求,而高架电力线普通车辆也无法满足要求,所以采用无人机加装特定设备用于带电作业的需求也随之产生。
3.在电力作业中,高压电力线的带电剪线在施工中经常遇到,现在的做法一般是施工人员登高进行手工作业,随说会采取很好的保护措施,但是高空作业仍然存在一定危险,而且在带电作业中,如果防护不到位,很容易造成触电风险,因此研制一种可以自动地进行高空线缆切断的设备是很有必要的。
技术实现要素:
4.本发明的目的在于提供一种基于远程遥控的高空线缆剪切装置,以解决现有技术中高空线缆切断工作效率低,危险性较高的问题。
5.本发明提供了一种基于远程遥控的高空线缆剪切装置,其解决技术问题的技术方案包括提升装置、控制组件以及夹紧剪切组件,所述提升装置将控制组件以及夹紧剪切组件从低处提升至高空线缆的位置,所述夹紧剪切组件设有夹紧部和剪切部,所述夹紧部与剪切部平行间隔布置;所述夹紧部和剪切部均安装在支架上,所述夹紧部设有两个同步转动开合的夹爪,所述剪切部设有定刀片、动刀片、推杆、油缸、活塞;所述油缸以及定刀片固定在支架上,所述动刀片的刀口与定刀片的刀口相向设置且转动连接在定刀片的一侧,所述活塞位于油缸内部,所述活塞的一端与推杆连接,所述推杆的另一端铰接在动刀片上,所述控制组件安装在支架上,用于控制夹紧剪切组件的动作,所述控制组件设有开关总成以及电线组件。
6.优选的,所述提升装置设有卷轴,所述卷轴上缠绕有链条或者钢丝绳,所述链条或者钢丝绳的一端连接至支架。
7.优选的,所述定刀片上穿插有销轴,所述动刀片转动连接在销轴上且一端面与所述定刀片的一端面贴合布置。
8.优选的,所述夹紧部还设有架体、推块,所述架体固定在支架上,两个所述夹爪转动连接在架体的下端,两个夹爪相对设置,架体上设有沿架体直线往复运动的推块,所述推
块的一端同时与两个夹爪的接触,所述推块的滑动可推动两个夹爪同步打开。
9.优选的,所述两个夹爪与所述架体之间转动连接的部位均设有扭簧,所述两个夹爪在扭簧的作用下处于夹紧状态。
10.优选的,所述动刀片的转动中心与所述夹爪的转动中心位于同一水平直线上。
11.优选的,所述提升组件还包括无人机,所述卷轴安装在无人机上,所述无人机上设有用于驱动所述卷轴转动的伺服电机。
12.优选的,所述支架上安装有位于定刀片一侧的摄录组件,还包括显示装置,所述显示装置与所述摄录组件通信连接。
13.优选的,所述剪切部的剪切直径范围为0
‑
20cm。
14.综上所述,运用本发明的技术方案,至少具有如下的有益效果:
15.1、采用无人机操控夹紧剪切装置自动提升,无需操作人员攀爬施工,减少了高处施工的危险;
16.2、通过远程遥控控制夹紧剪切装置自动夹紧线缆,自动切断,杜绝了人工参与,避免由于带电作业对人体可能造成的触电风险;
17.3、在电缆剪切前,可对设备进行预定位夹紧,便于后续剪切操作的进行,提高了高空线缆剪切的工作效率。
附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明整体结构立体图;
20.图2是本发明侧视图;
21.图3是本发明主视图;
22.图4是本发明剪切部部位局部剖视图;
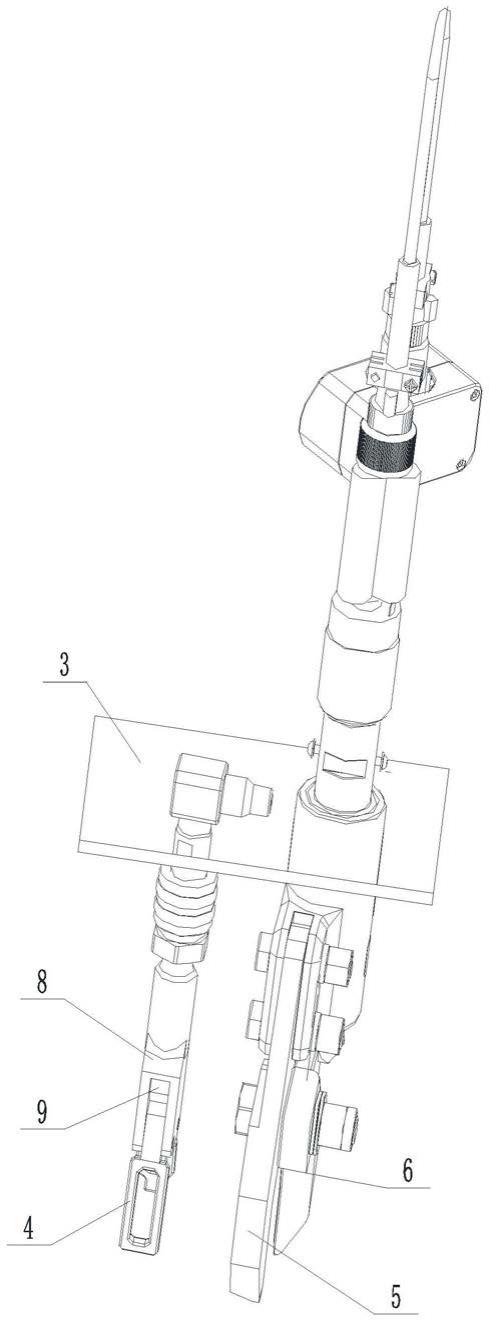
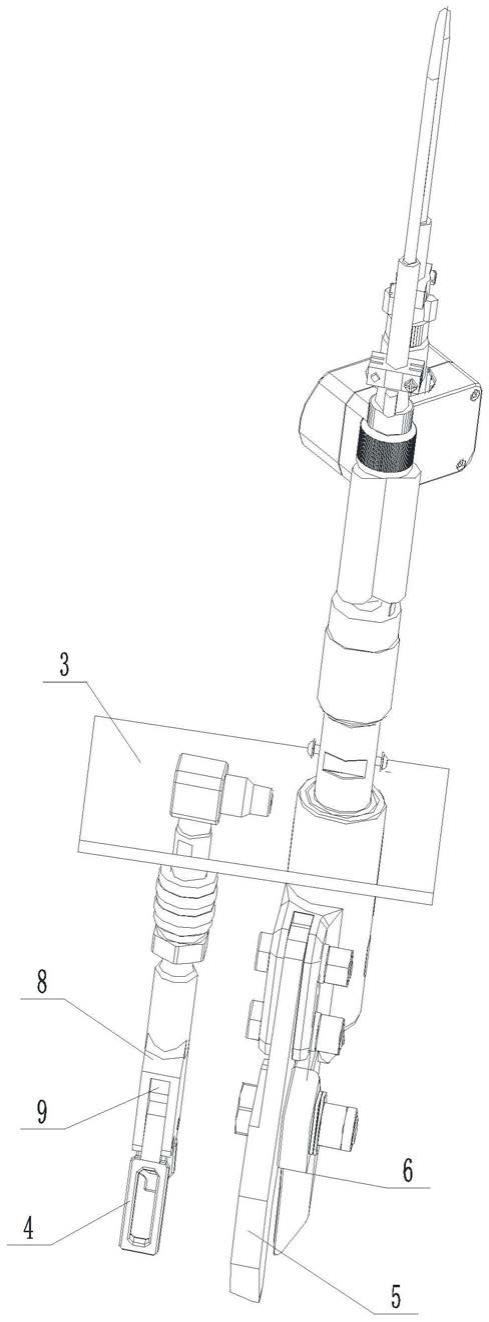
23.图5是本发明提升装置和夹紧剪切组件连接结构示意图。
24.图中;1、提升装置;2、夹紧剪切组件;3、支架;4、夹爪;5、定刀片;6、动刀片;7、推杆;8、架体;9、推块。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明提供一种基于远程遥控的高空线缆剪切装置,如图1
‑
5所示,包括提升装置1、控制组件以及夹紧剪切组件2,其中提升装置1用于将控制组件以及夹紧剪切组件2从低处提升至高空线缆的位置,在具体设计时,为了便于操作,提升装置1可采用无人机作为平台进行提升,工作人员通过操控无人机将夹紧剪切组件2升至高空线缆的位置,并通过遥控
移动至待工作的区域;通过夹紧剪切组件2进行切断作业。本发明中夹紧剪切组件2设有夹紧部和剪切部,其中夹紧部用来预定位夹紧剪切组件2的位置,并通过自身的结构实现对线缆的预夹紧,其中夹紧部设有两个可同步转动开合的夹爪4;夹爪4具体的开合结构有以下两种实施例:第一是夹紧部设有架体8、推块9,所述架体8固定在支架3上,两个所述夹爪4转动连接在架体8的下端,两个夹爪4相对设置,架体8上设有沿架体8直线往复运动的推块9,所述推块9的一端同时与两个夹爪4的接触,所述推块9的滑动可推动两个夹爪4同步打开;在本实施例中,通过推块9的往复直线运动带动两个夹爪4同步动作;第二是夹紧部设有架体8、螺杆、螺母、导杆,其中螺杆与螺母螺纹连接,螺母滑动连接在导杆上,螺杆的转动通过螺纹会带动螺母沿导杆直线运动,两个夹爪4与螺母之间是铰接连接的,夹爪4与架体8之间也为铰接连接,这样螺母的直线运动会带动两个夹爪4的转动。本发明中夹紧部与剪切部是平行间隔布置的且二者均安装在支架3上,形成一个整体,剪切部设有定刀片5、动刀片6、推杆7、油缸、活塞;油缸以及定刀片5固定在支架3上,所述动刀片6的刀口与定刀片5的刀口相向设置且转动连接在定刀片5的一侧,所述活塞位于油缸内部,所述活塞的一端与推杆7连接,所述推杆7的另一端铰接在动刀片6上;在工作过程中,定刀片5是固定不动的,剪切力的实现只是通过动刀片6的转动与定刀片5之间的相互作用实现的,其中推杆7是直线运动的,推杆7的直线运动通过油缸驱动,采用油压驱动,可提高较大而且稳定的驱动力,推杆7的直线运动可推动动刀片6转动,进而提供剪切力。控制组件安装在支架3上,用于控制夹紧剪切组件2的动作,所述控制组件设有开关总成以及电线组件,控制组件用来控制夹紧部和剪切部的动作,通过控制组件来协调二者之间的相互动作关系,以及各部分单独的动作,比如夹紧部的夹紧动作以及剪切部的剪切动作,本发明中夹紧部和剪切部是通过同一套油路系统进行控制的,这样控制组件在工作过程中,还起到控制右路走向,实现在剪切作业时,先夹紧后剪切的效果,其中控制组件控制油路的运行是通过阀体来实现的。
27.本发明中提升装置1设有卷轴,所述卷轴上缠绕有链条或者钢丝绳,所述链条或者钢丝绳的一端连接至支架3;卷轴和驱动转轴转动的伺服电机在使用时都是负载在无人机上的,无人机需要满足一定的承载力,其负载额定力与夹紧剪切组件2以及提升组件的重量有关。
28.本发明在动刀片6铰接的具体结构为;在定刀片5上穿插有销轴,所述动刀片6转动连接在销轴上且一端面与所述定刀片5的一端面贴合布置。
29.为了使夹紧部更好的实现对线缆的夹紧效果,夹紧部设有架体8、推块9,所述架体8固定在支架3上,两个所述夹爪4转动连接在架体8的下端,两个夹爪4相对设置,架体8上设有沿架体8直线往复运动的推块9,所述推块9的一端同时与两个夹爪4的接触,所述推块9的滑动可推动两个夹爪4同步打开,针对该夹紧结构,本发明的其中一个实施例为两个夹爪4与所述架体8之间转动连接的部位均设有扭簧,所述两个夹爪4在扭簧的作用下处于夹紧状态,在该实施例中,夹紧部对线缆的夹紧是通过扭簧来实现的,这样推块9的推力需要克服扭簧的扭力以实现对两个夹爪4的打开。
30.为了使预定位更加可靠精准,本发明中动刀片6的转动中心与所述夹爪4的转动中心位于同一水平直线上。
31.为了便于地面操作人员观测线缆切割过程中可能遇到的问题,本发明支架3上安装有位于定刀片5一侧的摄录组件,还包括显示装置,所述显示装置与所述摄录组件通信连
接,其中显示装置是位于地面上的,可供施工操控人员进行观测。
32.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。