1.说明书公开一种检测感应数据的方法,特别是指利用深度学习法与机器学习法从感测数据建立检测模型的一种感测数据智能检测方法与系统。
背景技术:
2.当检测一个产品、一个系统或一个场域是否有异常时,常见的方式是利用特定传感器感测出数据,如感测声音、拍摄影像等,之后以分析工具分析出感测数据中的信息,借此判断待测对象是否有异常状况。
3.举例来说,当要判断一个物体表面是否有瑕疵,可以照相机拍摄物体表面,可比对物体表面影像与样本影像,可判断出是否有异常的情况。若以马达为例,一般的方式是以声音传感器录制马达运转时产生的音讯,经比对声音样板后可判断是否运作有异常,作为日后改良的依据。
技术实现要素:
4.说明书公开一种感测数据智能检测方法与系统,方法运行于一计算机系统中,计算机系统设有一内存,其中储存执行感测数据智能检测方法的程序集以及算法,计算机系统还设有一数据库,其中储存自一待检测对象所取得的感测数据。
5.在一实施例中,感测数据为通过传感器感测待检测对象得出的数据,在感测数据智能检测方法中,先将感测数据区分为训练数据与测试数据,对其中的训练数据执行一深度学习算法,从该训练数据中取得关于待检测对象的特征,建立用以检测待检测对象的一检测模型,接着以其中的测试数据测试此检测模型,针对测试结果为不通过的测试数据,执行机器学习算法,并以历史参数数据训练检测模型,以一模型优化算法优化检测模型,以得出经优化待检测对象的控制参数。
6.进一步地,还从训练数据中得出验证数据,于上述步骤中从训练数据经深度学习算法形成检测模型时,可以此验证数据验证检测模型,以得出用以产生控制参数的一参数模型。所述控制参数为驱动待检测对象运作的参数,产生经过优化的控制参数即为所述方法的主要目的的一个。
7.进一步地,可再以模型优化算法优化参数模型,再产生经优化的控制参数,并继续驱动待检测对象,反复以上步骤,再次得出感测数据,通过重复感测数据智能检测方法优化待检测对象的控制参数。
8.进一步地,在一实施例中,可以一k折交叉验证法利用验证数据评估从多个深度学习算法与机器学习法产生的多个模型,评估的因子例如为从多个深度学习算法产生的该多个模型中得出各模型的准确度、精确度与召回率,再根据评分从中选出检测模型。
附图说明
9.图1示出感测数据智能检测系统的系统架构实施例图;
10.图2示出感测数据智能检测方法的主要流程实施例图;
11.图3示出系统运行感测数据智能检测方法的流程实施例之一;
12.图4示出系统运行感测数据智能检测方法的流程实施例之二;
13.图5示出感测数据智能检测方法中训练数据、验证数据与测试数据的运作实施例示意图;
14.图6示出感测数据智能检测方法的实施例流程图;
15.图7示出感测数据智能检测方法中优化的范例流程图;以及
16.图8示出应用感测数据智能检测方法的范例流程图。
具体实施方式
17.说明书公开一种感测数据智能检测方法与系统,方法的主要目的的一个是利用深度学习算法初期训练与建立模型,以及配合机器学习算法执行后期测试与训练,从感测数据中训练得出用以检测特定待检测对象的检测模型。举例来说,待检测对象可为一个产品、一个系统或一个场域,利用传感器感测待检测对象的特定信息,如影像、声音、震动,得出的感测数据如拍摄待检测对象得出的影像、录制待检测对象产生的声音并转换得到的频谱,或是检测待检测对象运作时产生的震动的信息,这些感测数据可成为检测各种待检测对象的信息,用以优化驱动待检测对象运作的控制参数。
18.实现所述感测数据智能检测系统的实施例可参考图1所示的系统架构实施例图。
19.图中示出一待检测对象10,待检测对象以控制参数驱动而运作,所述感测数据智能检测系统能够通过学习感测数据优化其本身的控制参数,或是优化产生此待检测对象的系统的控制参数。举例来说,待检测对象10通过一或多个传感器(传感器一101、传感器二102与传感器三103)感测待检测对象10得出感测数据,若以拍摄待检测对象10产生影像为例,传感器一101、传感器二102与传感器三103可为拍摄多角度的摄影机;若以感测某个场域的环境情形,传感器一101、传感器二102与传感器三103可为设于场域中不同位置传感器。传感器一101、传感器二102与传感器三103产生的感测数据可储存于感测数据处理主机12,再转换与初步处理成为计算机系统14中数据库145中的数据。
20.计算机系统14设有处理器141、内存143以及数据库145,其中内存143用以储存执行感测数据智能检测方法的程序集以及算法,数据库145用以储存以一或多个传感器量测待检测对象10后所得出的感测数据,再以计算机系统14的处理器141执行感测数据智能检测方法。
21.运用上述系统架构,图2示出系统所执行的感测数据智能检测方法的主要流程实施例图。
22.系统一开始,如步骤s201,取得自待检测对象所得出的感测数据,接着如步骤s203,将感测数据区分为训练数据(training data)与测试数据(testing data),在特定实施例中,可再由训练数据中得出验证数据(validation data)。在步骤s205中,对训练数据执行一深度学习算法(deep-learning algorithm),可从训练数据中取得关于待检测对象的特征,这些特征反映出待检测对象运作或是相关系统运作的信息,从中学习而建立用以检测待检测对象的检测模型,这是一种基于深度学习的检测模型。
23.之后,如步骤s207,以感测数据中选择的测试数据测试以上步骤得出的检测模型,
检测结果包括通过测试的部分,以及未通过测试的部分。通过测试的数据表示检测模型符合预期,表示从目前检测模型所得出的模型参数为适当,不用调整。然而,若检测结果包括了未通过测试的部分,在所述感测数据智能检测方法中,如步骤s209,可针对不通过的测试数据,执行机器学习算法,并以历史参数数据训练以上步骤得出的检测模型,可以历史参数数据训练得出参数模型,再以一模型优化算法优化检测模型,此为一种基于机器学习的检测模型,如步骤s211,可以得出经优化待检测对象的控制参数。
24.机器学习(machine learning)方法涵盖众多,如支持向量机(support vector machine)、随机森林(random forest)、简单贝叶斯(bayes)和深度学习算法等等。以上所述深度学习算法为机器学习(machine learning)方法的一种,利用计算机系统中处理器的算力,可以将所得到的大量感测数据通过多个处理层(layer)中的线性或非线性转换(linear or non-linear transformation),以特征抽取(feature extraction)步骤取得数据中代表关于待检测对象的感测数据特性的特征。
25.常见深度学习算法采用了卷积神经网络(convolution neural networks,cnn)或递归神经网络(recurrent neural network,rnn)两种方法,卷积神经网络可以其卷积层(convolutional layer)里利用卷积运算过滤感测数据,以计算机处理器算力逐步抽取其中特征,以求最终能建立模型(如上述检测模型),能用以检测系统产生的感测数据。
26.举例来说,自待检测对象取得的感测数据如影像数据、声音数据、震动数据等,在所述方法中,系统可将感测数据(sensed data)中的一部分(如90%)设为训练数据(training data),训练数据通过深度学习算法(如cnn、rnn)建立检测模型,感测数据剩下的一部分(如10%)设为测试数据(testing data),用以测试系统所建立的检测模型。
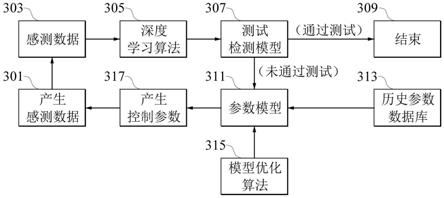
27.图3示出系统运行感测数据智能检测方法的流程实施例。
28.在流程一开始,可以自待检测对象产生感测数据(301),并形成感测数据智能检测建立模型的感测数据(303),感测数据或其部分(如从感测数据取得的训练数据)用于执行深度学习算法(305),以建立一种基于深度学习的检测模型,再以部分数据(如从感测数据取得的测试数据)测试此检测模型(307),针对通过测试的部分,即无需后续参数优化的过程,结束流程(309);针对未通过测试的部分,则用以建立一参数模型(311)。
29.在建立参数模型(311)的过程中,将所述未通过测试的数据再次进行机器学习,从系统中历史参数数据库(313)取得历史参数数据,对参数进行模型训练,建立参数模型,并以一种模型优化算法(model optimization)(315)优化检测模型的模型参数,形成基于机器学习的检测模型,最终产生经过优化的控制参数(317),能再次汇入待检测对象,继续产生感测数据(301)。
30.在此一提的是,所述控制参数,为驱动待检测对象运作的参数,或是产生待检测对象的系统的运作参数。特别的是,在一实施例中,还可从训练数据中得出验证数据(validation data),可以在训练数据经深度学习算法形成检测模型时,以此验证数据验证检测模型,以得出用以产生控制参数的一参数模型,之后才以模型优化算法(315)优化参数模型,再输出经优化的控制参数。
31.如此,将经优化的控制参数(317)驱动待检测对象,再次得出感测数据(301),通过重复所述的感测数据智能检测方法持续优化待检测对象的控制参数,直到系统默认的一个期待的状态。
32.图4接着示出另一系统运行的流程实施例,此实施例示出系统中保存持续产生的感测数据(303)将成为历史感测数据库(400),这些历史感测数据库400继续进行深度学习(305),利用计算机系统的算力持续训练数据,优化检测数据。另一方面,经测试检测模型后,通过测试的数据,其中的参数可成为历史参数数据库(313)的一部分,持续反复地进行机器学习,优化参数模型。
33.根据一实施例,在执行模型优化算法时,可以采用多种参数模型,例如遗传算法(genetic algorithms)、粒子群优化算法(particle swarm optimization)、蚁群优化算法(ant colony optimization)、仿真退火法(simulated annealing)、禁制搜寻法(tabu search)、海鸥优化算法(seagull optimization algorithm)以及贝氏优化算法(bayesian optimization)的其中的一个。而进行优化的参数模型如梯度提升判定树模型(gradient boosting decision tree)、极限梯度提升模型(extreme gradient boosting)、类别提升模型(categorical boosting)、轻型gbm模型(light gbm)、随机森林模型(random forest)、支持向量机模型(support vector machine)、关系型向量机模型(relevance vector machine)、简单贝氏分类模型(bayes)、k最近邻居演算模型(k nearest neighbor)、cnn模型或rnn模型。在一优选实施例中,系统所采用的模型优化算法可以采用贝氏优化算法(bayesian optimization),深度学习算法可采用cnn模型,参数模型则可采用极限梯度提升模型(extreme gradient boosting)。
34.根据实施例之一,所述感测数据智能检测方法中可以采用一k折交叉验证法(k-fold cross-validation),此验证法可为将训练数据分为多组(k个)数据,其中一组数据作为验证模型的数据,其他组数据(k-1个)作为训练数据,之后轮替k组数据进行k次验证,最终可得到评估模型的参数。其中,以此k折交叉验证法从验证数据评估从多个深度学习算法产生的多个模型,再从中选出检测模型,而其中评估多个模型的方式的一个为得出各模型的一准确度(accuracy)、一精确度(precision)与一召回率(recall)等因子,包括利用这些因子所得出的评估方程式。
35.举例来说,所述k折交叉验证法,以10折(10-fold)交叉验证为例,运算时,将所取得的感测数据分为10等份,其中第1份数据可用来作为测试模型用的测试数据,其余9份可用于训练数据用。接着,到了下一轮流程,将以第2份数据作为测试检测模型用的数据,其余9份同样用于训练数据用。以此类推,总共执行10轮流程,可以取得10的准确率,并取得平均值,得到较为客观的准确率。
36.在一实施例中,可根据各个检测模型所预测的结果为是或否(yes/no)以及实际量测待检测对象所得到的实际检测结果为是或否(yes/no)之间的关联性得出「准确度」、「精确度」与「召回率」,作为评估检测模型的依据。
37.举例来说,模型预测结果为是(yes)而实际检测结果也为是(yes)的数据设为「tp」;模型预测结果为是(yes)而实际检测结果为否(no)(表示预测错误)的数据设为「fp」;模型预测的结果为否(no)而实际检测结果为是(yes)(表示预测错误)的数据设为「fn」;模型预测为否(no)且实际测试也为否(no)的数据设为「tn」。
38.根据以上设定,所述「准确度」表示模型预测正确的比例,数学式为:“accuracy=(tp tn)/n
total”,也就是:模型预测结果为是而实际检测结果也为是的数据(”tp”)加上模型预测为否且实际测试也为否的数据(”tn”)除以全部数据(n
total
)。
39.所述「精确度」为整个系统要优化检测模型的主要目标的一个,数学式为:”precision=tp/(tp fp)”,也就是实际检测结果为是且模型预测也为是的数量(”tp”)占了模型预测为是的全部数量(即”tp” ”fp”)的比例。
40.所述「召回率」表示模型的错误率,数学式为:”recall=tp/(tp fn)”,也就是:模型预测结果为是而实际检测结果也为是的数据(”tp”)占了实际检测为是的全部数据(即”tp” ”fn”)的比例。
41.进一步地,更可将以上「准确度」、「精确度」与「召回率」的计算结果进行其他运算(如f1 score=2/((1/precision) (1/recall)))作为评估模型优劣的依据。
42.图5示出感测数据智能检测方法中训练数据、验证数据与测试数据的运作实施例示意图,以下并配合图6所示感测数据智能检测方法的实施例流程图进行说明。
43.系统中数据库50设有感测数据与参数数据(步骤s601),感测数据主要可分为训练数据501与测试数据505,而训练数据501的一部分可用于作为验证数据503(步骤s603)。基于训练数据501,以深度学习算法训练模型(52),得出一检测模型(步骤s605)。以测试数据505进行测试模型(56)(步骤s607),以得出用以产生控制参数的参数模型。这时,可以机器学习模型产生控制参数(步骤s609)。另一方面,验证数据503则是执行模型的验证,得出一参数模型(步骤s611)。
44.根据一实施例,其中可通过模型优化算法(53)优化参数模型(步骤s613,并可继续以测试数据测试参数模型(步骤s615),再形成检测模型(54)。经反复上述流程,可以从引入不同的深度学习算法,通过训练数据501、验证数据503与测试数据505反复优化而得出多个检测模型,以产生控制参数(步骤s617)。再经比较模型57,而根据需求判断出系统适用的模型(58),并完成所述感测数据智能检测流程(59)。
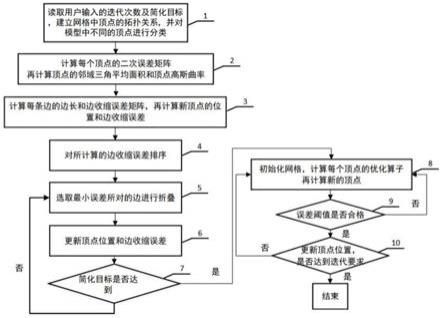
45.上述优化模型的方法可参考图7所示感测数据智能检测方法中优化的范例流程图。
46.根据以上实施例描述利用模型优化算法优化模型以定义出最优检测模型的流程中,可汇入历史参数数据(步骤s701),以机器学习算法训练这些数据建立参数模型(步骤s703),接着以此参数模型得出控制参数,在逐一以k折交叉验证法(步骤s705),利用验证数据测试从多个深度学习算法产生的多个模型(步骤s707),再从中评估(如采用上述「准确度」、「精确度」与「召回率」等因子)与选出最适合的检测模型(步骤s709)。之后对所选择的模型执行模型参数优化算法(步骤s711),以得出优化后的检测模型(步骤s713),检测模型可用来生成最优控制参数。
47.列举一范例,可参考图8所示流程图,此例示出建立检测马达的检测模型的智能方法。
48.通过声音传感器取得马达的振动声音(步骤s801),将音讯转换为频谱,建立感测数据库中的数据(步骤s803),接着以深度学习算法训练这些感测数据(如其中取得的训练数据),抽取数据中关于马达运作状况的声音特征,得出各种音频关于马达运作异常与否以及其控制参数的关联性,建立用以检测马达的检测模型(步骤s805)。之后,系统利用感测数据中取得的验证数据验证上述步骤训练得出检测模型(步骤s807),验证后决定检测模型(步骤s809)。
49.系统即利用此检测模型产生控制参数,驱动马达,也同时通过传感器录制声音,形
成音频的感测数据,接着检测这些感测数据(如影像化的频谱)(步骤s811),从感测数据判断是否通过测试?(步骤s813),若通过测试,表示以目前的检测模型决定的控制参数驱动马达是符合系统所需,即结束此流程(步骤s815)。
50.若并未通过测试(否),表示需要持续以参数模型优化参数(步骤s817),再以产生的控制参数驱动马达运作(步骤s819),持续利用传感器得出震动声音,经转频谱后,由检测模型检测数据判断是否通过检测,并反复以上步骤,持续优化参数模型以得出最优的控制参数。
51.进一步地,根据另一应用的实施例,以所揭露的感测数据智能检测方法应用在检测屏幕,以示出参数驱动屏幕以显示内容,如上流程,可先以影像传感器取得大量屏幕的影像数据,从中以深度学习算法取得影像数据中的特征,建立影像与屏幕显示参数的关联性,可以建立检测屏幕的检测模型,包括以验证数据验证而决定检测模型,再利用此检测模型产生显示参数,并接着产生屏幕的影像数据,进行测试,以及执行后续机器学习算法优化检测模型,以得出屏幕经优化的显示参数。
52.综上所述,根据以上实施例所描述的感测数据智能检测方法与系统,特别的是,在方法中训练数据建立模型时,除了由感测数据中的一部分作为训练数据(training data)外,也有一部分作为测试模型的数据(testing data),再从训练数据中取得一部分作为验证数据(validation data),以验证系统产生的检测模型,此为一种内部优化的步骤。更者,在训练模型时,还可采用多种深度学习与机器学习算法,产生多种模型,可同样优化这些模型后,最后进行模型比较、评估后再选择其中的一个模型进入实际应用。
53.惟以上所述仅为本发明的优选可行实施例,非因此即局限本发明的专利范围,故举凡运用本发明说明书及图示内容所为的等效结构变化,均同理包含于本发明的范围内,合予陈明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。