1.本发明涉及一种输送和整理纸币的自动纸币处理系统的技术。
背景技术:
2.过去提出了“应用了带有机械手的多关节型机械臂(以下,有时称为
‘
带有手的臂’。)的纸币处理装置”(例如,日本特开昭62
‑
92095号公报等)。在这样的纸币处理装置中,在纸币码齐单元中码齐的纸币捆被带有手的臂的机械手把持并被多关节型机械臂输送到纸币计数纸币确认单元,纸币捆在纸币计数纸币确认单元中按照币种类别被分类,并且对每个币种的张数进行计数。然后,分类为各个币种的纸币捆按照币种类别被另一个带有手的臂输送到规定的位置。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开昭62
‑
92095号公报。
技术实现要素:
6.发明要解决的问题
7.本发明的技术问题在于提供一种易于使用的自动纸币处理系统。
8.用于解决问题的手段
9.根据本发明的第一方面,提供一种自动纸币处理系统,其包括:容器输送装置,用于输送存储纸币的存储容器;第一臂,用于解锁存储容器的锁并打开存储容器的盖;第二臂,用于取出存储于存储容器的纸币;纸币输送装置,用于输送第二臂取出的纸币;箱体,用于蓄积多个存储容器份的纸币;以及第三臂,抓取由纸币输送装置输送的纸币并蓄积于箱体中。
10.发明的效果
11.如上所述,根据本发明,能够提供一种易于使用的自动纸币处理系统。
附图说明
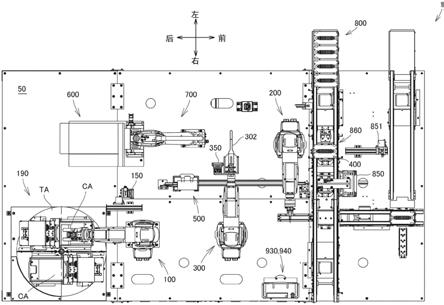
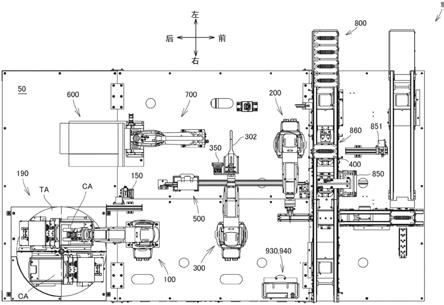
12.图1是示出本发明实施方式的自动纸币处理系统的整体结构的平面图。
13.图2是示出本发明实施方式的自动纸币处理系统的整体结构的右侧视图。
14.图3是本发明实施方式的纸币存储容器的立体图。
15.图4是本发明实施方式的第一臂的侧视图。
16.图5是本发明实施方式的第二臂的侧视图。
17.图6是本发明实施方式的机械手的立体图。
18.图7是本发明实施方式的机械手的侧视图。
19.图8是示出本发明实施方式的纸币存储容器的前盖打开状态下的纸币存储容器和机械手的侧视图。
20.图9是示出本发明实施方式的机械手插入于纸币存储容器状态下的纸币存储容器和机械手的立体图。
21.图10是示出本发明实施方式的机械手插入于纸币存储容器状态下的纸币存储容器和机械手的侧剖视图。
22.图11是示出本发明实施方式的输送装置的侧视图。
23.图12是示出本发明实施方式的输送装置的平面图。
24.图13是示出本发明实施方式的输送装置的动作的第一侧视示意图。
25.图14是示出本发明实施方式的输送装置的动作的第一侧视示意图。
26.图15是示出本发明实施方式的箱体和第三臂的平面图。
27.图16是本发明实施方式的第三臂的侧视图。
28.图17是示出本发明实施方式的控制装置的构成的框图。
29.图18是示出本发明实施方式的容器种类数据的示意图。
30.图19是示出本发明实施方式的各个容器数据的示意图。
31.图20是示出本发明实施方式的锁数据的示意图。
具体实施方式
32.以下,参照附图对本发明的实施方式进行说明。在以下的说明中,对相同的部件标注相同的附图标记。它们的名称以及功能也相同。因此,不重复关于它们的详细说明。
33.如图1和图2所示,本实施方式的自动纸币处理系统1主要具有box输送装置800、box传感器850、反转装置860、第一臂200、第二臂300、纸币输送装置500、打印机600、第四臂700、第三臂100、拍摄装置150、容纳部190以及控制它们的控制装置。在本实施方式中,这些装置载置于台50上。更详细而言,控制装置容纳于台50下,而在台50上配置有操作部930和显示部940。
34.在台50的前部配置有输送装置800。在输送装置800的后方的左侧配置有第一臂200。在输送装置800的后方的右侧配置有第二臂300。在第一臂200的后方配置有第四臂700,在第四臂700的后方配置有打印机600。在第二臂300的后方配置有第三臂100,在第三臂100的后方配置有容纳部190。并且,在从第一臂200与第二臂300之间至第四臂700与第三臂100之间配置有纸币输送装置500。
35.以下,对构成自动纸币处理系统1的各部的功能、结构、动作等进行说明。需要说明的是,以下为了进行说明,将从第三臂100朝向第二臂300称为前方,从第二臂300朝向第三臂100称为后方,从第一臂200朝向第二臂300称为右方,从第二臂300朝向第一臂200称为左方,铅锤向上称为上方,铅锤向下称为下方。换言之,将图1中的上方称为各装置的前方,图1的下方称为各装置的后方,图1的右方称为各装置的右方,图1的左方称为各装置的左方,图1的纸面的近前方向称为各装置的上方,图1的纸面的里侧方向称为各装置的下方。
36.<box输送装置800>
37.首先,对box输送装置800的结构进行说明。如图3所示的纸币存储容器400通过商店的工作人员载置于输送装置800的端部(图1中的上方侧)。纸币被层叠并容纳于纸币存储容器400。输送装置800将纸币存储容器400输送到第一臂200的附近。
38.在本实施方式中,在纸币存储容器400的锁孔或前盖的背侧的表面埋设有存储与
纸币存储容器400有关的信息的ic标签等。例如,在ic标签中存储有与纸币存储容器400有关的各种信息,例如纸币存储容器400的种类、设定的装置的识别信息等。并且,通过利用输送装置800的附近的相机851拍摄纸币存储容器400,来确定纸币存储容器400的种类。另外,通过利用输送装置800的附近的box传感器850进行基于光学传感器的通信和基于rfid的通信,来读出ic标签的各种信息。在本实施方式中,控制装置900(参照图17)基于来自box传感器850的数据和来自安装于第二臂300的拍摄部350的图像,获取与作为对象的纸币存储容器400有关的种类、尺寸、锁孔的位置、锁孔的角度,并且将这些信息传递给第一臂200和第二臂300。
39.当锁孔的方向不在第一臂200侧时,控制装置900利用反转装置860变更纸币存储容器400的朝向。
40.需要说明的是,还可以通过利用红外线等,使box传感器850读取与纸币存储容器400有关的各种信息,而不限于埋设有ic标签的纸币存储容器400。例如,优选地,box传感器850具有ic传感器、红外线传感器、条形码传感器、接近传感器等。
41.<第一臂200>
42.在本实施方式中,如图4所示,第一臂200具有用于解锁纸币存储容器400的前盖420的钥匙210。例如,第一臂200基于来自控制装置900的锁孔的位置、角度的信息等,通过使钥匙210的位置向前后左右上下移动,或使钥匙210旋转,来将钥匙210插入到纸币存储容器400的锁孔。第一臂200基于来自控制装置900的指令,通过使钥匙210转动,来解锁纸币存储容器400,并且直接打开前盖420。更详细而言,控制装置900基于从第二臂300的拍摄部350获得的图像来正确地确定锁孔的上下左右的位置和锁孔的旋转角度并向第一臂200发送控制命令,以使钥匙210插入到锁孔。
43.<第二臂300>
44.如图5所示,第二臂300在多关节型机械臂301的前端安装有用于把持纸币的机械手302。
45.如图6和图7所示,机械手302是二指型的机械手,如图5所示,安装于第二臂300的前端。并且,如图6和图7所示,该机械手302主要由可动指310、固定指320、可动指升降机构330、连接部340以及拍摄部350构成。以下,对这些构成要素进行详细描述。
46.如图6和图7所示,可动指310由基部311、中间部312以及爪部313形成。如图6所示,基部311是呈大致长方形形状的厚板部位。如图6所示,中间部312是呈大致梯形形状的厚板部位,并且从基部311的前端向前方dy延伸。需要说明的是,该中间部312的宽度随着朝向前方dy而变窄。如图6所示,爪部313是细长且呈大致矩形的厚板部位,从中间部312的前端向前方dy延伸。另外,在此,如图7所示,该爪部313的前端部形成为向下侧突起的形状。并且,如图7所示,在该可动指310中,从中间部312的基端到爪部313的前端为止的部位的上表面,随着从中间部312的基端朝向爪部313的前端而向下方倾斜。另外,如图7所示,在该爪部313的下表面贴附有橡胶片sr。并且,该可动指310在基部311的基端侧固定于可动指升降机构330的前侧升降板332f(后述)。另外,为了提高可动指310和前侧升降板332f的接合强度而设置有加强板315(参照图6和图7)。该加强板315固定于可动指310和前侧升降板332f双方。
47.如图6和图7所示,固定指320由基部321、中间部322、爪部323以及突出部324形成。如图6所示,基部321是呈大致长方形形状的厚板部位。如图6所示,中间部322是呈大致梯形
形状的厚板部位,并且从基部321的前端向前方dy延伸。需要说明的是,该中间部322的宽度随着朝向前方dy而变窄。如图6所示,爪部323是细长且呈大致矩形的厚板部位,从中间部322的前端侧的侧面的宽度方向中央向前方dy延伸。如图7所示,在该爪部323的上侧设置有切口cv。其结果,如图6所示,爪部323的前端部形成为向上侧突起的形状。另外,如图7所示,在该固定指320中,从爪部323的中间位置到前端为止的部位的下表面随着从中间位置朝向前端而向上方倾斜。如图6所示,突出部324是与爪部323同宽度的细长且呈大致矩形的厚板部位,从爪部323的前端向前方dy延伸。另外,如图7所示,该突出部324的前端位置ts位于可动指310的爪部313的前端位置tm的前侧。即,固定指320的突出部324比可动指310的爪部313更向前方dy突出。进而,在该突出部324贴附有作为防滑件的橡胶片(橡胶片材)sr。如图7所示,该橡胶片sr的贴附部位与可动指310的橡胶片sr的贴附位置不相对。并且,该固定指320固定于可动指升降机构330的支撑板331(后述)。另外,为了提高固定指320和支撑板331的接合强度而在左右设置有一对加强板325(参照图6和图7)。这些加强板325固定于固定指320和支撑板331双方。并且,如图6和图7所示,该固定指320在可动指310的升降方向上与可动指310相对。
48.如图6和图7所示,可动指升降机构330是两段行程型的升降机构,主要由支撑板331、前侧升降板332f、后侧升降板332r、前侧气缸机构333f以及后侧气缸机构333r构成。支撑板331支撑后侧气缸机构333r。后侧气缸机构333r为复动型气缸,是用于使后侧升降板332r升降的驱动源。并且,如上所述,该后侧气缸机构333r安装于支撑板331。在后侧升降板332r安装有前侧气缸机构333f。前侧气缸机构333f为复动型气缸,是用于使前侧升降板332f升降的驱动源。并且,如上所述,在前侧升降板332f安装有可动指310。即,后侧气缸机构333r通过使后侧升降板332r升降,来使前侧气缸机构333f、前侧升降板332f以及可动指310升降。另一方面,前侧气缸机构333f通过使前侧升降板332f升降,来使可动指310升降。另外,如图6和图7所示,在前侧气缸机构333f和后侧气缸机构333r分别设置有供气排气口335、336。在这些供气排气口335、336连接有供气排气管(未图示)。
49.连接部340是使机械手302连接于第二臂300的部位,例如是法兰等。
50.如图6和图7所示,拍摄部350例如是ccd相机等小型相机,通过从可动指升降机构330的支撑板331延伸的支撑臂sa,固定于可动指升降机构330的右侧。此外,该拍摄部350间歇地进行拍摄,同时将拍摄到的图像的电子数据发送给控制装置(未图示)。
51.接下来,对本实施方式的第二臂300从纸币存储容器400抽出纸币捆的例子进行说明。在说明第二臂300之前,先对纸币存储容器400进行说明。
52.如图3所示,纸币存储容器400主要由框体410、前盖420、夹持板411以及支撑台412a、412b构成。如图3所示,框体410是前侧开口的长方体形状的箱体。此外,该框体410的进深尺寸设置为比固定指320的长度充分长。前盖420是呈大致长方形形状的板构件,经由铰链等开闭机构,可开闭地轴支撑于框体410的开口边缘的上侧。夹持板411是与支撑台412a、412b协动而夹持纸币捆mt的构件,并且上下移动自由地设置于比框体410的高度方向中央稍微靠近上侧的位置。另外,在该夹持板411的前侧中央设置有半圆形状的切口rs。支撑台412a、412b是与夹持板411协动而夹持纸币捆mt的左右分离型的支撑构件,固定于框体410的下侧的左右。在这些支撑台412a、412b之间形成有狭缝rt。狭缝rt朝进深方向延伸。并且,在纸币存储容器400中,夹持板411通过设置于其上侧的施力构件(螺旋弹簧等)来向下
方被施力。即,容纳于该纸币存储容器400的纸币捆mt被夹持板411向支撑台412a、412b按压。并且,如图3所示,在该纸币存储容器400中,以纸币的长度方向沿着进深方向的状态,在支撑台412a、412b与夹持板411之间存储纸币捆mt。
53.当第二臂300抽出纸币存储容器400中的纸币捆mt时,例如,通过控制装置900,第二臂300如下地动作。
54.首先,控制装置900控制第二臂300的动作,使机械手302向规定位置移动并朝向规定方向(参照图8)。需要说明的是,在此,规定位置是纸币存储容器400的正面侧的位置,规定方向是拍摄部350能够拍摄纸币存储容器400的正面的方向。
55.接着,控制装置900控制第二臂300和机械手302,使可动指310提升到最高位置,然后将固定指320的前端部插入到支撑台412a、412b的狭缝rt(参照图9和图10)。需要说明的是,此时,可动指310位于夹持板411的切口rs的上方,而固定指320位于纸币捆mt的正下方(参照图10)。另外,此时,固定指320插入到狭缝rt的中间位置,但是可动指310只插入到夹持板411的切口rs的上方位置(参照图10)。即,固定指320与纸币捆mt的下侧面在纸币捆mt的长度方向的一半左右的长度上接触,而可动指310只与纸币捆mt的近前侧的上侧面接触(参照图10)。
56.接着,控制装置900使可动指310向下方移动,并与固定指320一起把持纸币捆mt。控制装置900控制第二臂300的动作,使机械手302后退,由此从纸币存储容器400抽出纸币捆mt。
57.并且,尤其在本实施方式中,如后所述,控制装置900控制第二臂300的动作,不改变机械手302的姿势地将纸币捆mt传递给纸币输送装置500。由此,第二臂300能够迅速地过渡到针对下一个纸币存储容器400的锁孔的拍摄处理和纸币的取出处理。
58.<纸币输送装置500>
59.如图1所示,纸币输送装置500配置于台50的大致中央部,将从第二臂300接收的纸币捆mt按照原样迅捷地移动到第三臂100的附近。参照图11和图12,纸币输送装置500包括:容纳部510,用于容纳纸币;滑动机构520,用于使容纳部510从第一臂200旁边移动到第三臂100的旁边;以及整理机构530,用于整理纸币。
60.容纳部510包括载置纸币的底面511和用于包围纸币的四角以使纸币不从容纳部510露出的壁部512、512、512、512。优选地,壁部512、512、512、512的宽度、位置关系容易对应多个国家的多种纸币。换言之,对于比较大的纸币,纸币与壁部512、512、512、512之间的间隙较小,而对于比较小的纸币,纸币与壁部512、512、512、512之间的间隙较大。例如,壁部512、512、512、512包围的空间的尺寸形成为比纸币存储容器的内部尺寸稍大。
61.如后所述,在底面511沿着前后方向形成有用于使第二臂300的机械手302的固定指320向后方抽出的槽部511x。另外,在底面511沿着左右方向形成有用于使第三臂100的固定指120进入的槽部511y。
62.需要说明的是,在本实施方式的容纳箱510中,其上方开口,并且用于使投入纸币捆mt的第二臂300通过的间隙、即后侧的两个壁部512、512之间的间隙设置于侧面,并且用于使抽出纸币捆mt的第三臂100通过的间隙、即右侧的两个壁部512、512之间的间隙设置于侧面,但是关于容纳部510的形状,不限于上述的形状,只要能够迅捷地投入纸币捆mt即可。例如,间隙可以仅形成在一个侧面,可以由第一臂200和第二臂300共同使用该间隙。
63.另外,关于滑动机构520,只要能够使容纳部510在前后方向上滑动即可,其形态不受特别限制。例如,可以通过马达来使前端安装有容纳部510的促动器滑动,也可以利用由马达驱动的驱动辊、从动辊等来驱动与容纳部510一起移动的链条、带。
64.参照图13和图14,对本实施方式的纸币输送装置500的动作进行说明。首先,在通常状态下,纸币输送装置500的容纳部510在第三臂100的附近待机。在该状态下,纸币存储容器400通过box输送装置800输送到第二臂300的附近,并且通过第一臂200解锁,由此前盖420开放。
65.如图13(a)所示,第二臂300将机械手302插入于纸币存储容器400,并且抓取并拿出纸币捆mt。需要说明的是,优选地,第二臂300将机械手302插入到纸币存储容器400并将纸币捆mt先向近前稍微抽出,然后将机械手302再次插入到纸币存储容器400并重新牢固地抓取纸币捆mt。
66.如图13(b)所示,第二臂300从纸币存储容器400抽出纸币。
67.在本实施方式中,如图13(c)所示,第二臂300在从纸币存储容器400抽出纸币之后,通过拍摄部350来拍摄纸币存储容器400的内侧,由此确认残留有纸币与否。
68.当确认到没有残留纸币时,如图13(d)所示,控制装置900利用滑动机构520来使容纳部510移动到前方、即第二臂300的附近。更详细而言,滑动机构520使容纳部510移动到第二臂300的基部的左侧旁边。
69.如图14(a)所示,第二臂300的多关节型机械臂301不改变机械手302的姿势地使机械手302移动到容纳部510的正上方。
70.如图14(b)所示,第二臂300的多关节型机械臂301不改变机械手302的姿势地使机械手302移动到容纳部510内。在本实施方式中,第二臂300的多关节型机械臂301不改变机械手302的姿势地使机械手302下降。换言之,机械臂301以保持机械手302自身的朝向、倾斜度的状态,使机械手302向下方移动。
71.此时,机械手302的爪部313、323在容纳部510内、即壁部512、512、512、512的内侧下降,而机械手302的基部311、321在容纳部510的外侧下降。换言之,机械手302的中间部312、322或者基部311、321穿过后侧的两个壁部512、512之间下降。
72.如图14(c)所示,当机械手302到达容纳部510的底面511时,第二臂300结束纸币捆mt的夹持,并且将机械手302从容纳部510抽出。即,爪部313、323通过槽部511x、后侧的两个壁部512、512之间向后方抽出。第二臂300的多关节型机械臂301将机械手302移动到偏离纸币输送装置500的路径上的位置,例如,纸币存储容器400的锁孔的拍摄位置。
73.如图14(d)示出,控制装置900利用滑动机构520来使容纳部510移动到后方、即第三臂100的附近。尤其是,在本实施方式中,在滑动机构520的后端部安装有用于整理被壁部512、512、512、512包围的纸币捆mt的角的整理机构530。
74.整理机构530是纵长的树脂制构件,并且构成为能够在前后方向上移动。并且,整理机构530配置于当容纳部510移动到滑动机构520的后端部时整理机构530的前端部进入到壁部512、512的内侧的位置。由此,即使容纳部510猛烈地向后方移动并突然停在滑动机构520的后端部,由于纸币首先与整理机构530接触而失去势头,因此能够减少纸币从后侧的壁部512、512之间向外飞出,或者纸币与后侧的壁部512、512碰撞而从容纳部510向上方飞出的可能性。
75.当容纳部510停在滑动机构520的后端部时,由第四臂700载置纸张,并且整理机构530在前后方向上振动。由此,纸币通过整理机构530的前端部,被按压到前侧的壁部512、512,其结果,纸币捆mt的角被整理。
76.在这样的本实施方式中,如图13的(a)(b)所示,机械臂301以保持机械手302水平且朝向前后方向的状态,插入到纸币存储容器400抓取纸币捆mt并拿出。如图13的(c)所示,优选地,机械臂301为了拍摄纸币存储容器400内而使机械手302朝向上下方向,但是在左右方向上不摆动。并且,如图13(d)至图14(c)所示,机械臂301以保持机械手302水平且朝向前后方向的状态,使其移动到容纳部510的正上方,然后使其下降到容纳部510的内部。即,在本实施方式中,通过使机械手302减少在与抓取纸币的方向形成直角的方向、例如俯视图中的左右方向上的摆动动作,能够使机械手302高速移动而不洒落纸币。
77.需要说明的是,也可以使机械手302在上下方向上不进行摆动动作。即,机械臂301可以以保持机械手302水平且朝向前后方向的状态,使其插入到纸币存储容器400抓取纸币捆mt并拿出,然后移动到容纳部510的正上方,之后使其下降到容纳部510的内部。即,通过减少使机械手302摆动的动作,能够使机械手302高速移动而不洒落纸币。
78.<打印机600>
79.打印机600将表示纸币捆mt是从作为对象的纸币存储容器400取出的信息打印在纸张上并排出该纸张。更详细而言,在本实施方式中,控制装置900从box传感器850获取与纸币存储容器400有关的各种信息。控制装置900将纸币存储容器400的识别信息发送给打印机600。打印机600将纸币存储容器400的识别信息打印在纸张上并排出该纸张。
80.<第四臂700>
81.当纸币输送装置500将纸币输送到后方时,第四臂700把持位于打印机600的纸张排出部的纸张。需要说明的是,通过打印机600,将曾存储该纸币的纸币存储容器400的识别信息打印在该纸张上。第四臂700将抓取的纸张载置于容纳部510内的该纸币的上表面。之后,通过整理机构530,纸张和纸币捆mt一起被整理。
82.更详细而言,在本实施方式中,通过整理机构530来使纸币捆mt在前后方向上整理,并且通过第四臂700来使纸币捆mt在左右方向上整理。在本实施方式中,通过上述两个动作,来使纸币捆mt向容纳部510的右上角整理。
83.<第三臂100>
84.如图15和图16所示,第三臂100主要由机械手110和机械臂ra构成。以下,对这些构成要素进行详细描述。
85.如图15和图16所示,机械手110是二指型的机械手。另外,机械手110固定于机械臂ra的前端。并且,如图16所示,该机械手110主要由可动指111、固定指112、可动指往复运动机构113、拖拽防止部117、拖拽防止部往复运动机构118以及连接部119构成。
86.如图15和图16所示,可动指111是用于把持纸币捆mt的双叉形状的部位。可动指111的二指两者是与固定指112(后述)大致平行相对的厚板部位。此外,可动指111固定于可动指往复运动机构113的第一升降板114(后述)。另外,在可动指111的侧面显示有标记。
87.如图16所示,固定指112是用于把持纸币捆mt的双叉形状(未图示)的部位。固定指112的二指两者是与可动指111大致平行相对的厚板部位。此外,固定指112固定于可动指往复运动机构113的支撑板116(后述)。另外,在该固定指112中,在与可动指111的标记显示面
相同一侧的侧面,显示有标记。显示在可动指111和固定指112的标记,沿着与可动指111和固定指112的相对方向平行的方向排列。
88.如图16所示,可动指往复运动机构113主要由第一升降板114、第二升降板115以及支撑板116构成。第二升降板115支撑第一升降板114,支撑板116支撑第二升降板115。第一升降板114和第二升降板115分别通过设置于各自的机构(例如,气缸机构等)(未图示)来升降。即,通过第一升降板114和第二升降板115升降,固定于第一升降板114的可动指111也进行升降。因此,能够在固定指112与升降的可动指111之间把持纸币捆mt,并且还能够解除把持状态。
89.如图16所示,拖拽防止部117是矩形的板状构件,固定于拖拽防止部往复运动机构118(后述)的前端。拖拽防止部117通过拖拽防止部往复运动机构118在前后方向上进行往复运动。
90.拖拽防止部往复运动机构118是用于在机械手110从纸币捆mt的输送目的地退避时防止拖拽纸币捆mt的机构,如图18所示,位于固定指112的二指之间,设置为与固定指112大致平行,并且固定于可动指往复运动机构113的支撑板116。另外,拖拽防止部往复运动机构118是进行往复运动的机构(例如,气缸机构等)(未图示),并且使拖拽防止部117在前后方向上往复运动。
91.通过使拖拽防止部117和拖拽防止部往复运动机构118如上所述那样构成,在把持有纸币捆mt的机械手110将纸币捆mt输送到输送目的地并解除把持状态并从输送目的地退避时,通过使拖拽防止部往复运动机构118向前方移动,拖拽防止部117防止纸币的拖拽。因此,在机械手110退避时,能够防止纸币捆mt倒塌。
92.如图16所示,连接部119是使机械手110与机械臂ra连接的部位,例如是法兰等。
93.机械臂ra例如是现有的多轴机械臂。如图15和图16所示,机械臂ra的基端可自由旋转地安装于固定台。
94.在本实施方式中,在第三臂100的附近配置有拍摄装置150。如图15所示,拍摄装置150例如是ccd相机等数字相机,设置于在机械手110把持利用点线表示的纸币捆(虚线)mt时,能够拍摄机械手110的侧面的位置。拍摄装置150以将把持有纸币捆mt的状态的机械手110的可动指111和固定指112的侧面容纳在一个图像中的方式进行拍摄,并获取拍摄数据。并且,拍摄装置150根据来自控制装置900的控制信号,向控制装置900发送拍摄数据。需要说明的是,拍摄装置150中的一系列的处理从机械手110把持纸币捆mt开始直至开始输送纸币捆mt为止之间进行。
95.在本实施方式中,控制装置900根据基于拍摄装置150发送的拍摄数据的机械手110的可动指111和固定指112的标记之间的距离,来测量纸币捆mt的厚度。控制装置900通过从拍摄数据分析并计算机械手110把持纸币捆mt时的标记之间的距离,来测量纸币捆mt的厚度。然后,控制装置900导出与纸币捆mt的厚度数据(以下,称为“厚度数据”)相应的纸币捆mt的输送速度和回旋半径。控制装置900例如可以通过将厚度数据与存储在后述的存储器的控制表进行对照,来导出与厚度数据对应的输送速度和回旋半径,也可以通过将厚度数据代入到根据厚度数据计算输送速度的计算式和根据厚度数据计算回旋半径的计算式,来导出与厚度数据对应的输送速度和回旋半径。然后,控制装置900向第三臂100发送纸币捆mt的输送速度和回旋半径的数据。需要说明的是,控制纸币捆mt的输送速度和回旋半
径,即意味着控制机械手110的输送速度和回旋半径。
96.接下来,对第三臂100进行的纸币的容纳处理的控制例进行说明。需要说明的是,在此,作为纸币捆mt的输送目的地的一例,如图15所示,采用安装于旋转台ta上的箱体ca。需要注意的是,本发明并不限定于该例。
97.首先,控制装置900控制机械臂ra,将机械手110移动到能够使在规定位置待机的机械手110把持纸币捆(参照图15的虚线)mt的位置。然后,控制装置900控制机械手110的可动指往复运动机构113,使预先提升到上方的机械手110的可动指111向下方移动并与固定指112一起把持纸币捆mt。需要说明的是,在此,优选地,预先码齐纸币捆mt,以使机械手110容易把持纸币捆mt。
98.接下来,在机械手110把持纸币捆mt的状态下,拍摄装置150以将机械手110的可动指111和固定指112的侧面容纳在一个图像中的方式拍摄。拍摄装置150向控制装置900发送拍摄数据。这些一系列的处理从机械手110把持纸币捆mt开始直至第三臂100开始输送纸币捆mt为止之间进行。
99.接着,控制装置900接收由拍摄装置150发送的拍摄数据。控制装置900根据拍摄数据中的机械手110的可动指111与固定指112之间的位置关系来测量纸币捆mt的厚度。然后,控制装置900导出与厚度数据对应的纸币捆mt的输送速度和回旋半径,并且将这些数据发送给第三臂100的控制部。这些一系列的处理也从机械手110把持纸币捆mt开始直至第三臂100开始输送纸币捆mt为止之间进行。然后,第三臂100利用导出的纸币捆mt的输送速度和回旋半径,来执行以下记载的控制。
100.例如,随着纸币捆mt的厚度变厚,控制装置900降低纸币捆mt的输送速度并缩短回旋半径。另外,随着纸币捆mt的厚度变薄,控制装置900提高纸币捆mt的输送速度并使回旋半径变长。但是,控制装置900在纸币捆mt的输送速度和回旋半径的分别设定的最大值和最小值的范围内控制纸币捆mt的输送速度和回旋半径。并且,控制装置900控制机械臂ra,将纸币捆mt输送到作为输送目的地的箱体ca。需要说明的是,控制装置900控制机械臂ra以使纸币捆mt依次堆积在箱体ca中。
101.接着,控制装置900控制机械臂ra,使机械手110的可动指111和固定指112插入到箱体ca的里侧,之后在控制拖拽防止部往复运动机构118使拖拽防止部117向前方移动的同时控制可动指往复运动机构113使可动指111向上方提升,由此解除把持状态并松开纸币捆mt。然后,控制装置900控制机械臂ra以保持机械手110的倾斜角度的状态使机械手110从箱体ca退避。此时,由于拖拽防止部往复运动机构118向前方移动,因此拖拽防止部117防止纸币捆mt被拖拽。然后,在机械手110从箱体ca完全退避之后,控制装置900控制拖拽防止部往复运动机构118将拖拽防止部117拉回到后方。最后,控制装置900控制机械臂ra,使机械手110移动至规定位置,并且准备下一次的纸币捆mt的输送。
102.<容纳部190>
103.参照图15,容纳部190包括旋转台ta和多个箱体ca。在本实施方式中,两个箱体ca配置为在旋转台ta上彼此背对背。第一箱体ca朝向第三臂100一侧,而第二箱体朝向与第三臂100相反的一侧。
104.控制装置900基于来自拍摄装置150的图像数据,计算第三臂100抓取的纸币捆mt的厚度,并且通过累计该纸币捆mt的厚度,来计算堆积在第一箱体ca中的纸币的量。当在第
一箱体ca中堆积了规定量以上的纸币时,控制装置900转动旋转台ta,使第二箱体ca朝向第三臂100一侧。操作员在该期间,将第一箱体ca从旋转台拆下,并且移动到用于进行下一项作业的装置。
105.<控制装置900>
106.接下来,参照图17说明控制装置900的构成。控制装置900搭载有cpu910、存储器920、显示器930、操作部940、通信接口960等。并且,cpu910根据存储器920的程序,控制自动纸币处理系统1的各部、控制装置900的各部。cpu910接收来自操作部940的命令,或将自动纸币处理系统1的动作状态显示于显示器930。另外,cpu910经由通信接口960,从自动纸币处理系统1的各部获取数据,或控制自动纸币处理系统1的各部。
107.例如,存储器920存储如图18所示的容器种类数据921。容器种类数据921按照纸币存储容器的种类,存储纸币存储容器的尺寸、锁孔的位置、锁孔的角度、锁的种类等。
108.另外,存储器920存储如图19所示的个别容器数据922。个别容器数据922按照纸币存储容器,存储识别信息、纸币存储容器的种类、设定的装置、上一次回收纸币的日期和时间等。
109.由此,cpu910基于从box传感器850接收的信息,通过参照个别容器数据922来确定作为对象的纸币存储容器400的种类,或通过参照容器种类数据921来确定锁孔的位置、角度。并且,cpu910经由通信接口960,将锁孔的位置、角度发送给第一臂200。
110.另外,cpu910基于来自第三臂100的拍摄装置150的数据,来计算这次抓取的纸币捆mt的厚度,或将蓄积的纸币的厚度存储于存储器920,或在箱体ca中积攒了规定量的纸币时转动旋转台ta。
111.<第二实施方式>
112.第一臂200可以具有与纸币存储容器400的种类相应的多个种类的钥匙。并且,可以通过box传感器850的检测,利用与纸币存储容器400相应的钥匙来解锁前盖420。
113.更详细而言,控制装置900的存储器920存储如图20所示的锁数据923。锁数据923按照锁的种类,存储识别信息、相对于作为基准的锁的位置的该锁的位置的校正值、相对于作为基准的锁的角度的该锁的角度的校正值、该锁尺寸即宽度、高度、深度等。
114.由此,cpu910基于从box传感器850接收的信息,通过参照个别容器数据922来确定作为对象的纸币存储容器400的种类,或通过参照容器种类数据921来确定锁孔的位置、角度,或确定与纸币存储容器400相应的锁的种类、各种校正值。然后,cpu910经由通信接口960,将锁孔的位置、角度、锁的种类、校正值发送给第一臂200。由此,第一臂200在通过校正值来校正位置、角度的同时,向纸币存储容器400的锁孔插入指定的钥匙并解锁。
115.<第三实施方式>
116.另外,在上述实施方式中,第二臂300抓住纸币存储容器400内的纸币捆mt,并在保持该纸币的姿势的状态下,将纸币投入于容纳部510。但是,第二臂300也可以改变纸币的姿势而将纸币投入于容纳部510。
117.更详细而言,优选地,第二臂300在抓取一个纸币存储容器400内的纸币之后,能够更迅捷地拍摄下一个纸币存储容器400的锁孔,或者能够更迅捷地抓取下一个纸币存储容器400内的纸币。为此,即使姿势稍微变化,只要能够通过输送装置500将第一臂200的纸币从纸币存储容器400迅捷地移离即可。
118.<第四实施方式>
119.不限于上述实施方式的构成,各个装置的作用可以由其它装置承担,或者一个装置的作用可以由多个装置承担,或者多个装置的作用可以由一个装置承担。
120.例如,第二臂300可以具有第一臂200的功能,相反地,第一臂200可以具有第二臂300的功能。或者,第一臂200或另一臂可以具有第二臂300的拍摄功能。
121.或者,例如,自动纸币处理系统1的控制结构等也不限于上述的结构。例如,box输送装置800、box传感器850、反转装置860、第一臂200、第二臂300、纸币输送装置500、打印机600、第四臂700、第三臂100、拍摄装置150、容纳部190等中的至少任一个可以由控制装置900直接控制,而不持有自身的计算机。
122.或者,相反地,可以通过使box输送装置800、box传感器850、反转装置860、第一臂200、第二臂300、纸币输送装置500、打印机600、第四臂700、第三臂100、拍摄装置150、容纳部190等中的至少任一个自身具有处理器、存储器等计算机,从控制装置900仅接收大致的指令,而详细的处理、计算在本地执行或判断。
123.<总结>
124.在上述实施方式中,提供一种自动纸币处理系统,其包括:容器输送装置,用于输送存储纸币的存储容器;第一臂,用于解锁纸币存储容器的锁并打开纸币存储容器的盖;第二臂,用于取出存储于纸币存储容器的纸币;纸币输送装置,用于输送第二臂取出的纸币;箱体,用于蓄积多个存储容器份的纸币;以及第三臂,抓取由纸币输送装置输送的纸币并蓄积于箱体中。
125.由此,通过本系统能够实现从纸币存储容器的解锁到将纸币蓄积于箱体的一系列的动作。尤其是,在本系统中,着眼于有限空间的有效利用、纸币的输送速度而选择各构成要素,并且在功能上彼此结合。
126.优选地,自动纸币处理系统还包括:打印机,用于打印用于识别每个存储容器的纸币的纸张;以及第四臂,用于将纸张载置于各纸币输送装置输送后的纸币上。第三臂按照纸张将纸币抓取并蓄积于箱体中。
127.优选地,自动纸币处理系统还包括用于整理纸币输送装置上的纸币的整理机构。第四臂将纸张载置于经整理的纸币上。
128.优选地,自动纸币处理系统还包括:相机,用于测量第三臂抓取的纸币的厚度;控制部,基于相机的图像,计算蓄积于箱体的纸币的厚度;以及用于在蓄积于箱体的纸币的厚度达到规定量以上时,将箱体更换为另一箱体的装置。
129.优选地,自动纸币处理系统在容器输送装置的附近还包括用于判断存储容器的种类的传感器。通过基于存储容器的种类确定锁的种类,来使第一臂解锁存储容器的锁。
130.优选地,自动纸币处理系统1在容器输送装置的附近还包括用于判断存储容器的种类的传感器。通过基于存储容器的种类确定锁孔的位置、锁孔的倾斜度,来使第一臂解锁存储容器的锁。
131.在上述实施方式中,提供一种纸币的自动处理方法,包括:利用第一臂解锁纸币存储容器的锁的第一步骤;利用第一臂打开已解锁的纸币存储容器的盖的第二步骤;在纸币存储容器的盖打开的状态下,利用第二臂取出存储于纸币存储容器的纸币的第三步骤;利用纸币输送装置输送已取出的纸币的第四步骤;以及利用第三臂抓取纸币输送装置输送的
纸币并蓄积于箱体中的第五步骤。
132.本发明的实施方式在所有方面均应视为示例性的而非限制性的。本发明的范围不是由上述的说明而是由权利要求的范围示出,并且意图包括在权利要求范围的等同含义和范围内的所有修改。
133.附图标记说明
134.1:自动纸币处理系统
135.50:台
136.100:第三臂
137.110:机械手
138.111:可动指
139.112:固定指
140.113:可动指往复运动机构
141.114:第一升降板
142.115:第二升降板
143.116:支撑板
144.117:防止部
145.118:防止部往复运动机构
146.119:连接部
147.120:固定指
148.150:拍摄装置
149.190:容纳部
150.200:第一臂
151.210:钥匙
152.300:第二臂
153.301:多关节型机械臂
154.302:机械手
155.310:可动指
156.311:基部
157.312:中间部
158.313:爪部
159.315:加强板
160.320:固定指
161.321:基部
162.322:中间部
163.323:爪部
164.324:突出部
165.325:加强板
166.330:可动指升降机构
167.331:支撑板
168.332f:前侧升降板
169.332r:后侧升降板
170.333f:前侧气缸机构
171.333r:后侧气缸机构
172.335:供气排气口
173.336:供气排气口
174.340:连接部
175.350:拍摄部
176.400:纸币存储容器
177.410:框体
178.411:夹持板
179.412a:支撑台
180.412b:支撑台
181.420:前盖
182.500:纸币输送装置
183.510:容纳部
184.511:底面
185.511x:槽部
186.511y:槽部
187.512:壁部
188.520:滑动机构
189.530:整理机构
190.600:打印机
191.700:第四臂
192.800:box输送装置
193.850:box传感器
194.860:反转装置
195.900:控制装置
196.910:cpu
197.920:存储器
198.930:显示器
199.940:操作部
200.960:通信接口
201.ca:纸币蓄积容纳箱体
202.mt:纸币捆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。