技术特征:
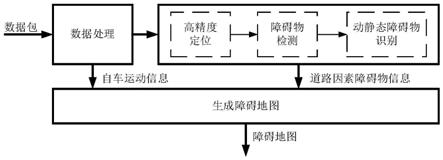
1.一种基于云计算的障碍地图的创建方法,其特征在于,主要步骤包括:s1、数据处理:接收并解析来自车辆终端的数据包,根据传感器类别分类存储数据以供建立障碍地图使用;s2、高精度定位:融合多传感器信息,使用ndt配准算法,配准当前时刻的配准点云与预先存储的点云地图以实现定位;s3、障碍物检测:根据高精度定位的结果,采用基于判断分析的降目标处理算法过滤非道路因素障碍物信息,采用聚类检测算法完成障碍物检测;s4、障碍物识别:根据障碍物检测的结果,采用目标识别与跟踪算法,识别动、静态障碍物并分类储存;s5、生成障碍地图:设计障碍地图界面,分类显示动、静态障碍物,实时更新障碍物的位置与运动信息。2.根据权利要求1所述的方法,其特征在于,所述数据处理具体包括如下步骤:s11、接收来自车辆终端的数据包;s12、解析所收到的数据包并存储于数据库内便于预处理;s13、提取gps、惯性导航传感器、激光雷达和自车行驶状态的数据并分类存储。3.根据权利要求1或2所述的方法,其特征在于,所述高精度定位具体包括如下步骤:s21、时间同步处理gps、惯性导航传感器和激光雷达数据;s22、加载存储于云端的点云地图,并对该点云地图进行网格化处理,计算每个网格的概率密度函数;s23、加载当前时刻的配准点云,并以使得配准得分最大化为优化目标,实现配准点云与点云地图的ndt配准;s24、获得配准后的对齐点云。4.根据权利要求3所述的方法,其特征在于,所述障碍物检测具体包括如下步骤:s31、对所述对齐点云进行地面分割,过滤与障碍物检测无关的地面点云信息;s32、对对齐点云进行降目标处理,过滤非道路因素障碍物信息;s33、过滤车身附近的对齐点云数据,防止出现因雷达反射而存在的虚假点云信息;s34、降采样处理对齐点云,减小计算复杂度;s35、使用欧几里德聚类算法处理对齐点云,获得障碍物点云簇;s36、利用框模型处理障碍物点云簇,便于障碍物识别。5.根据权利要求4所述的方法,其特征在于,所述障碍物识别具体包括如下步骤:s41、以框模型为对象,利用融合该模型形状参数和位置信息的模型差异度函数计算当前帧与上一帧的框模型之间的差异度,将差异度最小的两个框模型视为同一障碍物;s42、获得同一障碍物相邻两帧的位置和自车的运动状态,计算该障碍物在车辆坐标系下相对于自车的运动状态,包括相对速度、加速度和距离;s43、将计算所得的相对速度、加速度、距离与预设的障碍物分类阈值进行比较,根据结果将障碍物划分为静态障碍物与动态障碍物,并存储相应的运动状态信息;s44、利用跟踪控制器对动态障碍物进行跟踪,输出并存储当前帧的位置和车速。6.根据权利要求5所述的方法,其特征在于,所述生成障碍地图具体包括如下步骤:s51、以自车为中心,订阅包含框模型的对齐点云,并将其裁剪为预设尺寸,建立障碍地
图显示界面;s52、标记正在跟踪的框模型为红色,静态障碍物框模型为黄色;s53、存储并实时更新框模型的位置信息与运动信息于界面右侧,用于避障策略的选择和便于远程监控。7.根据权利要求4所述的方法,其特征在于,步骤s31对所述对齐点云进行地面分割,过滤与障碍物检测无关的地面点云信息中的地面分割为根据同一射线前后两点的坡度是否符合所设定的阈值而决定该激光点是否属于地面点云,具体步骤包括:s311、遍历所有射线以及射线上的所有激光检测点,确定所属激光检测点的位置;s312、根据所述激光检测点的半径梳理同一射线附近的点云关系;s313、通过判断前后两点高度差是否符合高度阈值实现地面识别,即若当前点高度并不在根据前一点高度所计算的高度范围内,且前一点是地面点,则当前点是地面点,若当前点高度在高度范围内,且前后两点距离大于相邻两点距离阈值,则当前点是地面点,若以上条件都不符合,则该点不是地面点。8.根据权利要求4所述的方法,其特征在于,步骤s32对对齐点云进行降目标处理,过滤非道路因素障碍物信息具体步骤包括:s321、对对齐点云进行空间划分,空间划分所需的距离阈值由激光检测点的坐标决定;s322、根据激光检测点的空间划分结果,计算该空间内点云地图的数据量,通过判断该数据量是否超过预置的数据量阈值确定激光检测点是否属于非道路因素障碍物点云,数据量阈值由所述激光检测点与车辆之间的距离决定。9.根据权利要求4所述的方法,其特征在于,步骤s32中的非道路因素障碍物信息指对道路行车安全影响小的障碍物的点云信息。10.根据权利要求9所述的方法,其特征在于,非道路因素障碍为树木、建筑物或城市基础设施建设。
技术总结
本发明公开一种基于云计算的障碍地图的创建方法。主要步骤包括:数据处理;高精度定位:配准当前时刻的配准点云与预先存储的点云地图以实现定位;障碍物检测:采用基于判断分析的降目标处理算法过滤非道路因素障碍物信息,采用聚类检测算法完成障碍物检测;障碍物识别:识别动、静态障碍物并分类储存;生成障碍地图。本发明将车端的计算与存储任务转移至云计算平台,将过滤非道路因素障碍物的障碍检测结果用于动、静态障碍物的识别,生成仅包含道路因素障碍物与自车运动信息的障碍地图,利用云计算平台的异构计算特点提高障碍检测过程的计算能力,使障碍地图能够满足实时、高效、准确的检测需求。确的检测需求。确的检测需求。
技术研发人员:王洪亮 王宜馨 皮大伟 谢伯元 王显会 王尔烈 孙晓旺 王霞
受保护的技术使用者:南京理工大学
技术研发日:2021.08.02
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。