1.本发明涉及一种基于动静态测试的三相12/8极开关磁阻电机建模方法,属于电机控制领域。
背景技术:
2.开关磁阻电机结构简单,转子无永磁体及绕组,转矩由定、转子间气隙磁阻变化产生。调速范围宽、可靠性高、适用于恶劣环境等优点,使其具有广阔的应用前景。然而,双凸极结构及磁路饱和特性,导致很难通过常规电磁和物理特性推导获得其精确的非线性数学模型,因此需要使用开关磁阻电机磁链特性建立其数学模型。目前开关磁阻电机磁链特性测试方法有两种:直接法与间接法。直接法是使用固定在电机上的磁链传感器直接测量磁链特性,该方法成本高误差大。间接法是通过测量电压与电流间接计算磁链,测试方法可分为两种:转子位置固定法与转矩平衡法。其中,转子位置固定法需要转子固定装置,测量电流与电压可得到每个位置的磁链特性。转矩平衡法是先通过给单相通电将转子旋转至对其位置,然后利用开关磁阻电机的对称结构,保持合转矩相同,给各相通入不同脉冲电压,可测量特殊位置的磁链特性。综上所述,转子位置固定法与转矩平衡法均有明显的缺点:转子位置固定法需要设计测量平台,测量成本高,耗时长,难以操作;转矩平衡法可得到磁链特性过少,拟合结果误差大。
技术实现要素:
3.针对转子位置固定法实现成本高、操作繁琐以及转矩平衡法建模误差较大的缺陷,本发明提出了一种基于动静态测试的开关磁阻电机建模方法,通过转矩平衡法静态测试获得的特殊位置磁链特性,以及动态测量获得的开关磁阻电机不饱和电感,根据相电感与不饱和电感的关系,计算得到开关磁阻电机所有位置的磁链特性。技术方案如下:
4.步骤一:使用转矩平衡法,利用开关磁阻电机在对齐位置与非对齐位置转矩为零的特点,通过给各相通入不同的脉冲电压,获得0
°
,7.5
°
,15
°
和22.5
°
四个特殊位置电感特性。
5.步骤二:开关磁阻电机低速运行时,给非导通相注入脉冲电压,记录相绕组的电流波形。根据母线电压、开关管压降、二极管压降以及各相电流斜率计算非饱和电感,非饱和电感的计算由式(1)求解,结合所记录的相应位置信号,再根据电感的对称性得到开关磁阻电机不饱和电感特性。
[0006][0007]
式中v
dc
、v
d
、v
t
、i
ph
分别表示直流母线电压、二极管压降、开关管压降、相电流。
[0008]
步骤三:通过式(2)计算开关磁阻电机特殊角度,并将电感特性分为三个阶段。其中θ1表示开关磁阻电机的定子前沿与转子后沿重合时的转子位置,θ2表示开关磁阻电机的
定子前沿与转子前沿重合时的转子位置,θ
a
表示开关磁阻电机的定子与转子中心对齐时的转子位置,θ
hr
为转子前沿与定子中心线相重合时的转子位置,β
r
为转子极弧,β
s
为定子极弧,n
r
为转子极对数。
[0009][0010]
步骤四:在0
°
<θ<θ1位置,认为相电感等于不饱和电感。
[0011]
步骤五:在θ1<θ<θ
hr
位置,认为不饱和电感与相电感为线性关系,可使用一次函数对不饱和电感与相电感进行拟合,如式(3)。基于不饱和电感得到θ1到θ
hr
位置相电感。
[0012]
l(θ)=k(i)l
un
(θ,i) l0(i)
ꢀꢀꢀ
(3)
[0013]
步骤六:在θ
hr
<θ<θ
a
位置,认为不饱和电感与相电感为二次关系,可使用二次函数对不饱和电感与相电感进行拟合,如式(4)。完成不饱和电感与相电感拟合后,基于不饱和电感数据与二次函数求根公式反解相电感数据,得到θ
hr
到θ2位置相电感。
[0014]
l
un
(θ)=a(i)l(θ,i)2 b(i)l(θ,i) c(i)
ꢀꢀꢀ
(4)
[0015]
步骤七:整合上述步骤得到[0,θ
a
]的电感特性,根据开关磁阻电机电感特性的对称性可以得到完整的电感特性,由式(5)计算得到磁链特性,由式(6)计算得到转矩特性。
[0016]
ψ
k
(θ,i
k
)=l
k
(θ,i
k
)i
k
ꢀꢀꢀ
(5)
[0017][0018]
其中,i
k
,t
k
,ψ
k
分别表示第k相绕组电流、转矩和磁链。
[0019]
步骤八:基于步骤七得到的开关磁阻电机磁链和转矩特性,完成开关磁阻电机数学模型建立。
[0020]
本发明的有益效果:
①
弥补了转矩平衡法精度误差过大的缺陷,能够得到较为精确的开关磁阻电机磁链和转矩特性;
②
测量过程操作简单,耗时短,成本低,能够实现开关磁阻电机建模。
附图说明
[0021]
图1为转矩平衡法得到的四条磁链特性图。
[0022]
图2为不饱和电感图。
[0023]
图3为不饱和电感与相电感的关系曲线图。
[0024]
图4为计算磁链与实验测试对比图。
[0025]
图5为计算转矩与实验测试对比图。
[0026]
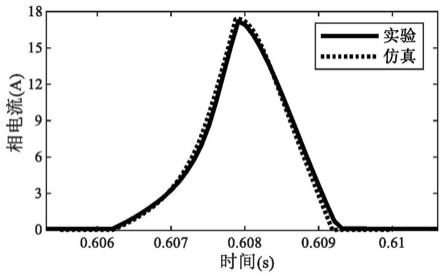
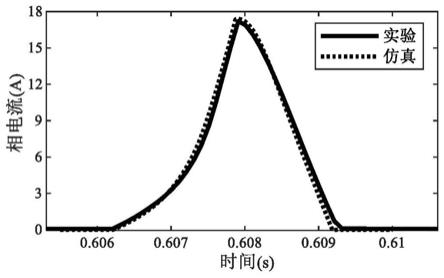
图6为转速1560rpm,开关角5
°
,关断角15
°
电动状态下,相电流对比图。
[0027]
图7为转速1000rpm,开关角30
°
,关断角40
°
发电状态下,相电流对比图。
具体实施方式
[0028]
以下结合附图和具体实例,对本发明的技术方案进行详细说明。实例所用电机为一个1kw三相12/8极开关磁阻电机。
[0029]
步骤一:使用转矩平衡法,利用开关磁阻电机在对齐位置与非对齐位置转矩为零的特点,通过给各相通入不同的脉冲电压,获得0
°
,7.5
°
,15
°
,22.5
°
位置电感特性,如图1所示;相电感计算公式如式(7)所示。
[0030][0031]
其中u为相电压,i为相电阻,r为绕组电阻。
[0032]
步骤二:开关磁阻电机低速运行时,给非导通相注入脉冲电压,记录相绕组的电流波形和对应的位置信号。根据母线电压、开关管压降、二极管压降以及各相电流斜率计算非饱和电感,非饱和电感的计算由式(1)求解,结合所记录的相应位置信号,再根据电感的对称性得到开关磁阻电机不饱和电感特性。如图2所示。
[0033]
步骤三:计算开关磁阻电机特殊角度,并将电感特性分为三个阶段,如图3所示。特殊角度的计算公式如式(2)所示。
[0034]
步骤四:在0
°
<θ<θ1位置,相电感等于不饱和电感。
[0035]
步骤五:在θ1<θ<θ
hr
位置,建立相电感与不饱和电感的线性函数关系如式(3)所示。
[0036]
将l(θ
hr
,i)、l(θ1,i)、l
un
(θ
hr
,i)、l
un
(θ1,i)带入线性函数解算得到k(i)和l0(i),其中l
un
(θ1,i)和l(θ1,i)可通过不饱和电感线性区计算得到,l(θ
hr
,i)近似为15
°
位置相电感。具体解算公式如式(8)所示。
[0037][0038]
步骤六:在θ
hr
<θ<θ
a
位置,建立相电感与不饱和电感的二次函数关系如式(4)所示。将l(θ
hr
,i)、l(θ
a
,i)、l
un
(θ
hr
)、l
un
(θ
a
)和k(i)带入二次函数如式(9)所示,根据式(10)解算得到a(i)、b(i)、c(i)。其中l(θ
a
,i)为22.5
°
位置相电感。得到不饱和电感与相电感二次函数关系后,根据不饱和电感的值使用二次函数求根公式反解相电感的值,从两根中取较大正值。具体解算公式如式(11)所示。
[0039][0040]
[0041][0042]
步骤七:利用上述步骤得到的完整电感特性,计算得到磁链特性与转矩特性曲线如图4、图5所示。
[0043]
步骤八:基于步骤七得到的开关磁阻电机磁链和转矩特性,完成开关磁阻电机数学模型建立。
[0044]
将使用本发明得到的开关磁阻电机与仿真和实验结果进行对比验证。图6所示为转速1560rpm,开关角5
°
,关断角15
°
电动状态下,开关磁阻电机相电流对比,实线为实验结果,点线为基于本发明计算得到特性仿真结果。图7所示为转速1000rpm,开关角30
°
,关断角40
°
发电状态下,开关磁阻电机相电流对比,实线为实验结果,点线为基于本发明计算得到特性仿真结果。以上对比验证证明本发明的准确性。
[0045]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。