1.本发明涉及机器人充电技术,具体涉及一种用于易燃易爆区域充电的挂轨机器人系统及其充电方法。
背景技术:
2.随着机器人行业的快速发展,机器人已逐步推广应用至多种行业。目前,移动式机器人充电多采用无线充电或者接触式充电,用于充电的无线充电线圈、接触式充电插针等处于外露状态,在一些特殊区域,无线充电线圈、接触式充电插针容易受损且存在电流泄漏的风险,进而造成安全事故。
技术实现要素:
3.为了解决现有移动式机器人采用无线或者接触式充电,无线充电线圈、接触式充电插针易受损且存在电流泄漏的风险,进而造成安全事故的技术问题,本发明提供了一种用于易燃易爆区域充电的挂轨机器人系统及其充电方法。
4.为实现上述目的,本发明提供的技术方案是:
5.一种用于易燃易爆区域充电的挂轨机器人系统,包括可在轨道上行走的挂轨机器人,其特殊之处在于:还包括能量转换机构;
6.所述挂轨机器人包括密封设备仓、作动机构、设置在密封设备仓内的充电电池以及分别设置在轨道侧壁的两个行走单元;
7.每个所述行走单元包括活动支撑台、行走轮以及设置在行走轮下方且驱动行走轮转动的行走电机;所述行走电机与充电电池相连;所述活动支撑台用于将行走轮压紧在轨道的侧壁上;
8.所述行走轮的转轴上端设置有第一卡扣件;
9.所述作动机构用于驱动行走轮与轨道侧壁脱离接触;
10.所述能量转换机构用于卡接挂轨机器人的行走轮,并驱动行走轮转动。
11.进一步地,所述活动支撑台包括转轴、支撑板、调节导向轴和弹性件,所述转轴平行于行走电机输出轴设置在密封设备仓上,支撑板与行走电机固连,且支撑板的一端活动连接在转轴上,另一端端部开设有过孔;调节导向轴内端部穿过过孔后与密封设备仓固连,弹性件套装在调节导向轴上且位于支撑板和调节导向轴外端部之间,用于将行走轮压紧在轨道的侧壁上;
12.所述作动机构包括设置在两个行走电机之间的一字形拨杆以及驱动一字形拨杆90
°
转动的舵机,所述一字形拨杆的两端部推动两个行走电机克服弹性件压力使行走轮与轨道侧壁脱离接触。
13.进一步地,所述能量转换机构包括固定在轨道上的下安装板、平行设置在下安装板上方的上安装板、连接下安装板和上安装板的多个导向柱、设置在下安装板上且用于驱动上安装板沿导向柱移动的驱动机构以及设置在上安装板上且分别用于与两个行走轮配
合的两个能量对接单元;
14.每个所述能量对接单元包括设置在上安装板上的能量转换电机以及位于能量转换电机下方且与能量转换电机输出轴相连的第二卡扣件,第二卡扣件用于与第一卡扣件卡接,使行走轮能够随能量转换电机输出轴同步转动。
15.进一步地,所述能量对接单元通过行走轮推开机构设置在上安装板上;
16.所述行走轮推开机构包括驱动电机、螺杆以及两个螺母;所述驱动电机设置在上安装板上;所述螺杆支撑在上安装板下方,且与驱动电机输出相连;两个螺母设置在螺杆上,能够被螺杆带动沿螺杆轴线相向运动或相背运动;
17.两个能量对接单元的能量转换电机分别与两个螺母固连。
18.进一步地,所述第一卡扣件为旋转轴,其外侧壁沿轴向开设有圆周均布的多个凸块,第二卡扣件为旋转轴套,其内壁设有与多个凸块配合的多个凹槽;
19.或者,所述第一卡扣件为旋转轴,其径向截面为多边形,第二卡扣件为旋转轴套,其内表面与旋转轴外表面相适配;
20.或者,所述第一卡扣件为第一旋转卡扣盘,其上端面沿径向设有圆周布置的多个第一卡齿,所述第二卡扣件为第二旋转卡扣盘,其下端面设有与第一卡齿配合的多个第二卡齿;
21.或者,所述第一卡扣件为锥形旋转轴,其外侧锥面设有第一齿形结构,所述第二卡扣件为锥形旋转套,其内侧锥面设有与第一齿形结构配合的第二齿形结构。
22.进一步地,所述能量对接单元还包括驱动轴、弹簧和挡圈;
23.所述驱动轴的上端与能量转换电机输出轴同轴固连,驱动轴的上外端部设有第一环形限位凸台,下外端部设有第二环形凸台;
24.所述弹簧和挡圈均套装在驱动轴中部,且弹簧的两端分别通过第一环形限位凸台下端面和挡圈上端面限位,挡圈下端面通过第二环形凸台上端面限位;
25.所述第二卡扣件的上部采用花键连接方式套装在驱动轴的下部,且与挡圈固连;
26.所述上安装板上安装有与导向柱配合的直线轴承;
27.所述驱动机构为电缸,其包括缸体和推动杆,缸体设置在下安装板上,推动杆的下部设置在缸体内,上端与上安装板固连;
28.或者,所述驱动机构为电缸,其包括缸体和电动推杆,缸体设置在下安装板上,电动推杆的下部设置在缸体内,上端与上安装板固连;
29.所述驱动轴的上部开设有用于安装能量转换电机输出轴的盲孔;
30.所述能量转换机构还包括设置在上安装板上且位于轨道上方的定位机构,用于挂轨机器人的定位阻挡。
31.同时,本发明还提供了另一种用于易燃易爆区域充电的挂轨机器人系统,包括可在轨道上行走的挂轨机器人,其特殊之处在于:还包括能量转换机构;
32.所述挂轨机器人包括密封设备仓、设置在密封设备仓内的充电电池以及分别设置在轨道侧壁的两个行走单元;
33.每个所述行走单元包括活动支撑台、行走轮以及设置在行走轮下方且驱动行走轮转动的行走电机;所述行走电机与充电电池相连;所述活动支撑台用于将行走轮压紧在轨道的侧壁上;
34.所述行走轮的转轴上端设置有第一卡扣件;
35.所述能量转换机构用于卡接挂轨机器人的行走轮,并使行走轮与轨道侧壁脱离接触,以及驱动行走轮转动。
36.进一步地,所述能量转换机构包括固定在轨道上的下安装板、平行设置在下安装板上方的上安装板、连接下安装板和上安装板的多个导向柱、设置在下安装板上且用于驱动上安装板沿导向柱移动的驱动机构以及通过行走轮推开机构设置在上安装板上且分别用于与两个行走轮配合的两个能量对接单元;
37.所述行走轮推开机构包括驱动电机、螺杆以及2个螺母;所述驱动电机设置在上安装板上;所述螺杆支撑在上安装板下方,且与驱动电机输出相连;2个螺母设置在螺杆上,能够被螺杆带动沿螺杆轴线相向运动或相背运动;
38.所述两个能量对接单元分别设置在2个螺母上,每个所述能量对接单元包括设置在螺母上的能量转换电机以及位于能量转换电机下方且与能量转换电机输出轴相连的第二卡扣件,第二卡扣件用于与第一卡扣件卡接,使行走轮能够随能量转换电机输出轴同步转动。
39.另外,本发明还提供了一种用于易燃易爆区域充电的挂轨机器人系统的充电方法,其特殊之处在于,包括以下步骤:
40.1)挂轨机器人在轨道上运行至能量转换机构下方,到位后挂轨机器人停止;
41.2)将挂轨机器人的行走轮与轨道侧壁脱离接触,以及能量转换机构与行走轮卡接;
42.3)能量转换机构驱动行走轮旋转,使行走电机旋转发电,并将电能储存至挂轨机器人的充电电池中,完成挂轨机器人的充电。
43.进一步地,步骤2)具体为:作动机构的舵机驱动一字形拨杆90
°
转动,一字形拨杆的两端部推动两个行走电机克服弹性件压力,将挂轨机器人的行走轮与轨道侧壁脱离接触;
44.能量转换机构的驱动机构驱动上安装板向下移动,使能量对接单元上的第二卡扣件与行走轮转轴上端的第一卡扣件卡接。
45.与现有技术相比,本发明的优点是:
46.1、本发明机器人系统在轨道上设有能量转换机构,在挂轨机器人正常工作时,能量转换机构位于在轨道上方,不会影响挂轨机器人的正常工作;在挂轨机器人需要充电时,挂轨机器人移动至能量转换机构下方,通过作动机构使行走轮与轨道侧壁脱开一定距离,然后能量转换机构的第二卡扣件下移与行走轮上的第一卡扣件相互卡接,通过能量转换机构驱动行走轮旋转,进而使行走电机旋转发电,将能量转换机构的动能传递至挂轨机器人的行走电机,最终将电能存储至充电电池,完成挂轨机器人的充电。因此,本发明挂轨机器人需要充电时,仅需要实现能量转换机构的第二卡扣件和行走轮上第一卡扣件的机械连接,挂轨机器人的充电是通过行走轮的转动(机械能)产生电能,实现挂轨机器人的防爆充电,避免现有无线充电线圈、接触式充电插针受损外漏风险,提高了充电的安全性。
47.2、本发明通过能量转换方式实现挂轨机器人自动充电,能量转换电机的动力源可为电机、油缸、压缩空气、液压、人工等,实现方式简单,且安全性高,提高特殊区域充电安全性。
48.3、本发明通过舵机驱动一字形拨杆转动,一字形拨杆推动行走电机绕转轴向外移动,该行走电机移动方式简单;以及一字形拨杆复位时,由于弹性件的恢复力,可使行走电机自动回位到行走轮与轨道侧壁接触状态。
49.4、本发明第二卡扣件和第一卡扣件可通过凹槽和凸块的配合(或者齿配合或多边形面型配合),实现同轴连接,连接方式简便。
50.5、本发明能量转换电机的输出轴和第二卡扣件之间设有驱动轴、弹簧和挡圈,在第二卡扣件上凹槽(或下端面的卡齿)和第一卡扣件上凸块(上端面的卡齿)未对正时,实现驱动轴与第二卡扣件的浮动连接,最终实现第二卡扣件和第一卡扣件的同轴卡装。
附图说明
51.图1为本发明具有易燃易爆区域充电的机器人系统实施例一结构示意图;
52.图2为图1的b
‑
b向剖视图;
53.图3为图1的c
‑
c向剖视图;
54.图4为本发明具有易燃易爆区域充电的机器人系统中挂轨机器人的结构示意图(一字形拨杆在舵机驱动下转动90
°
,行走轮与轨道脱开);
55.图5为图2的ⅰ处局部放大示意图;
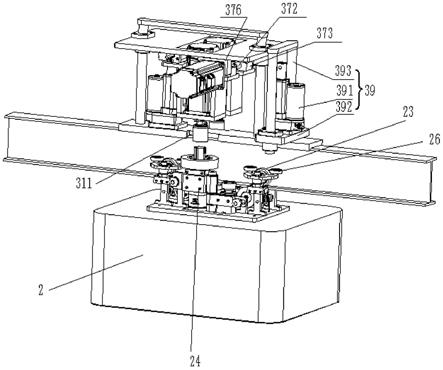
56.图6是本发明具有易燃易爆区域充电的机器人系统实施例二的立体示意图;
57.图7是本发明具有易燃易爆区域充电的机器人系统实施例二的结构示意图;
58.图8为图7的c
‑
c向剖视图;
59.图9为图7的d
‑
d向剖视图;
60.图10是本发明具有易燃易爆区域充电的机器人系统实施例三的结构示意图;
61.图11a是本发明具有易燃易爆区域充电的机器人系统实施例四中旋转轴的结构示意图;
62.图11b是本发明具有易燃易爆区域充电的机器人系统实施例四中旋转轴套的结构示意图;
63.图12a是本发明具有易燃易爆区域充电的机器人系统实施例五中第一旋转卡扣盘的结构示意图;
64.图12b是本发明具有易燃易爆区域充电的机器人系统实施例五中第二旋转卡扣盘的结构示意图;
65.图13a是本发明具有易燃易爆区域充电的机器人系统实施例六中锥形旋转轴的结构示意图;
66.图13b是本发明具有易燃易爆区域充电的机器人系统实施例六中锥形旋转套的结构示意图;
67.其中,附图标记如下:
[0068]1‑
轨道,11
‑
下横梁上侧面,12
‑
侧壁;
[0069]2‑
挂轨机器人,21
‑
密封设备仓,22
‑
作动机构,221
‑
一字形拨杆,222
‑
舵机,23
‑
支撑轮组,24
‑
行走单元,241
‑
活动支撑台,2411
‑
转轴,2412
‑
支撑板,24121
‑
过孔,2413
‑
调节导向轴,2414
‑
弹性件,242
‑
行走轮,2421
‑
第一卡扣件,2422
‑
第一卡齿,243
‑
行走电机,25
‑
充电电池,26
‑
导向轮组;
[0070]
31
‑
下安装板,311
‑
缺口,32
‑
上安装板,33
‑
导向柱,34
‑
驱动机构,35
‑
能量对接单元,351
‑
能量转换电机,352
‑
第二卡扣件,3521
‑
第二卡齿,353
‑
驱动轴,3531
‑
第一环形限位凸台,3532
‑
第二环形凸台,3533
‑
盲孔,354
‑
弹簧,355
‑
挡圈,36
‑
电机安装板,361
‑
螺母安装板,362
‑
电机安装板,363
‑
滑块安装板,371
‑
驱动电机,372
‑
螺杆,373
‑
螺母,374
‑
直线导轨,375
‑
滑块,376
‑
支座轴承,38
‑
直线轴承,39
‑
挡停机构,391
‑
动作电缸,392
‑
挡停定位板,393
‑
挡停导向轴。
具体实施方式
[0071]
以下结合附图和具体实施例对本发明的内容作进一步详细描述。
[0072]
实施例一
[0073]
如图1至图4所示,一种用于易燃易爆区域充电的挂轨机器人系统,包括能量转换机构和可在轨道1上行走的挂轨机器人2,挂轨机器人2的行走轨道为工字轨。
[0074]
挂轨机器人2包括密封设备仓21、作动机构22、与轨道1下横梁上侧面11接触的支撑轮组23、与轨道1侧壁12接触的导向轮组26以及分别设置在轨道1两侧壁12的两个行走单元24;密封设备仓21内设置有充电电池25。
[0075]
每个行走单元24包括活动支撑台241、行走轮242以及设置在行走轮242下方且驱动行走轮242转动的行走电机243,行走电机243与充电电池25相连,充电电池25向行走电机243提供电能使行走电机243动作,行走电机243驱动其上的行走轮242转动,带动挂轨机器人2整体在轨道1上行走;活动支撑台241包括转轴2411、支撑板2412、调节导向轴2413和弹性件2414,转轴2411平行与行走电机243输出轴设置在密封设备仓21上,支撑板2412的中部与行走电机243固连,且支撑板2412的一端活动连接在转轴2411上,支撑板2412可绕转轴2411转动,支撑板2412的另一端端部开设有过孔24121,本实施例中过孔24121为沿水平方向设置的长条孔;调节导向轴2413内端部穿过过孔24121后通过立板与密封设备仓21固连,调节导向轴2413的外端部设有限位结构,弹性件2414的两端抵靠于支撑板2412和调节导向轴2413外端部,用于将行走轮242压紧在轨道1侧壁12上;行走轮242的转轴上端设置有第一卡扣件2421。本实施例中,弹性件2414可为弹簧,弹簧套装在调节导向轴2413上且位于支撑板2412和调节导向轴2413外端部之间。
[0076]
作动机构22用于驱动行走轮242与轨道侧壁12脱离接触,其包括设置在两个行走电机243之间的一字形拨杆221以及驱动一字形拨杆221进行90
°
转动的舵机222,一字形拨杆221在舵机222驱动下转动90
°
,其两端部分别推动两个行走电机243向外(相背)移动,由于行走电机243与支撑板2412固连为一体,支撑板2412的一端与转轴2411活动连接,因此,在舵机222驱动一字形拨杆221转动过程中,一字形拨杆221端部推动行走电机243绕转轴2411向外移动,同时弹性件2414被压缩,行走电机243向外移动,使得行走电机243上的行走轮242与轨道1侧壁12脱离接触。
[0077]
能量转换机构用于卡接挂轨机器人2的行走轮242,并驱动行走轮242转动,其包括固定在轨道1上的下安装板31、平行设置在下安装板31上方的上安装板32、连接下安装板31和上安装板32的多个导向柱33、设置在下安装板31上且用于驱动上安装板32沿导向柱33移动的驱动机构34、设置在上安装板32上且分别位于两个行走轮242侧上方的两个能量对接单元35以及设置在上安装板32上且位于轨道上方的定位机构;上安装板32上安装有与导向
柱33配合的直线轴承38,直线轴承38与导向柱33配合使用,可上下做直线运动;每个能量对接单元35包括设置在上安装板32上的能量转换电机351以及位于上安装板32下方且与能量转换电机351输出轴相连的第二卡扣件352,能量转换电机351的上部穿设在上安装板32上,下部设有电机安装板36,电机安装板36设置在上安装板32上,电机安装板36上设有供能力转换电机输出轴穿过的通孔,当行走轮242与轨道1侧壁12脱离接触后,驱动机构34驱动上安装板32沿导向柱33向下移动,上安装板32上的能量对接单元35同步向下移动,能量对接单元35的第二卡扣件352穿过下安装板31上的缺口311与第一卡扣件2421配合,在能量转换电机351驱动下,实现能量转换电机输出轴与行走轮242同步转动,行走轮242转动过程产生的电能经行走电机243、转换电路板后存储至充电电池25,实现挂轨机器人2的充电。
[0078]
本发明第一卡扣件2421和第二卡扣件352需实现卡接,使行走轮242能够随能量转换电机351输出轴同步转动,本实施例第二卡扣件352为旋转轴套,其内壁沿轴向开设有圆周均布的多个凹槽,第一卡扣件2421为旋转轴,其外表面设有与多个凹槽配合的多个凸块。
[0079]
如图2和图5所示,本实施例能量对接单元35还包括驱动轴353、弹簧354和挡圈355;驱动轴353的上部中心开设有盲孔3533,能量转换电机351输出轴设置在该盲孔3533内,实现驱动轴353与能量转换电机351输出轴的同轴固连,驱动轴353的上外端部设有第一环形限位凸台3531,下外端部设有第二环形凸台3532;弹簧354和挡圈355均套装在驱动轴353中部,且弹簧354的两端分别通过第一环形限位凸台3531下端面和挡圈355上端面限位,挡圈355下端面通过第二环形凸台3532上端面限位;第二卡扣件352的上部用花键连接方式套装在驱动轴353的下部,且与挡圈355固连。
[0080]
在驱动机构34驱动上安装板32(能量对接单元35)向下移动过程中,当旋转轴套的凹槽与旋转轴的凸块对正时,随着上安装板32的下移,旋转轴装入旋转轴套内,实现旋转轴套和旋转轴的连接,即能量转换电机351输出轴与行走轮242的同轴连接;当旋转轴套的凹槽与旋转轴的凸块未对正时,随着上安装板32的下移,旋转轴的上端面和旋转轴套的下端面抵靠,能量转换电机351输出轴相对旋转轴套向下移动,弹簧354被压缩,直至能量转换电机351输出轴与旋转轴接触,在能量转换电机351微转动下,使旋转轴套上的凹槽发生转动,进而使旋转轴的凸块与旋转轴套的凹槽对正,旋转轴套向下移动,旋转轴装入旋转轴套内,实现旋转轴套和旋转轴的连接,即能量转换电机351输出轴与行走轮242的同轴连接。
[0081]
定位机构包括前挡停机构、后挡停机构、动作电缸以及设置在动作电缸下端部且用于与挂轨机器人2上端面定位销配合的第一定位销孔,前挡停机构和后挡停机构下行,用于阻挡挂轨机器人2,实现挂轨机器人2到位停止。
[0082]
本实施例中驱动机构34为气缸,其包括缸体和推动杆,缸体设置在下安装板31上,推动杆的下部设置在缸体内,上端与上安装板32固连。在其他实施例中,驱动机构34也可为电缸,其包括缸体和电动推杆,缸体设置在下安装板31上,电动推杆的下部设置在缸体内,上端与上安装板32固连。
[0083]
本实施例挂轨机器人系统的工作过程:
[0084]
1)挂轨机器人2在轨道1上运行,当挂轨机器人2的充电电池25电量低于设定值时,挂轨机器人2到达充电位置(能量转换机构下方),前挡停机构(或后挡停机构)下行阻挡,挂轨机器人2停止,然后后挡停机构(或者前挡停机构)下行阻挡,动作电缸驱动第一定位销套下行,与挂轨机器人2上端面的定位销配合,实现挂轨机器人2精确定位;
[0085]
2)启动舵机222,舵机222的输出轴旋转,带动一字形拨杆221旋转,将行走电机243推开一定距离,使行走轮242与轨道侧壁12脱开,如图4所示;
[0086]
3)启动驱动机构34,驱动机构34驱动上安装板32沿导向柱33在竖直方向向下移动,上安装板32上的能量转换机构同步向下移动,直至能量转换电机351输出轴的旋转轴套卡装入行走轮242的旋转轴内;
[0087]
4)外部动力源驱动能量转换电机351转动,实现能量转换电机351输出轴上的旋转轴套旋转,进而带动行走轮242的同步转动,行走轮242带动行走电机243旋转,将能量转换电机351的动能传递至挂轨机器人2的行走电机243,行走电机243旋转发电产生电流,产生的电流通过密封设备仓21内的电路存储至充电电池25,从而实现挂轨机器人端电机动能向电能的转换,完成挂轨机器人系统充电。
[0088]
充电完成后,驱动机构34驱动上安装板32沿导向柱33向上移动,然后舵机222带动一字形拨杆221反向旋转复位,由于弹性件2414的恢复力,行走电机243复位,行走电机243上的行走轮242与轨道1侧壁12接触,可实现行走轮242可在轨道1上行走。
[0089]
本发明将外部安全动力源(外部动力源:电机、油缸、压缩空气、液压、人工等)通过能量转换电机351旋转转换为动能,再通过能量转换电机351下方的旋转轴套与行走轮242上旋转轴相互卡接,将动能传递至行走电机243,行走电机243旋转发电,以达到将动能转换为电能,储存至充电电池25中,实现挂轨机器人2在易爆环境下的安全充电。
[0090]
实施例二
[0091]
如图6至图9所示,本实施例一种用于防爆区域的挂轨机器人系统,包括可在轨道1上行走的挂轨机器人2和能量转换机构;
[0092]
挂轨机器人2包括密封设备仓21、与轨道1下横梁上侧面11接触的支撑轮组23、与轨道1侧壁12接触的导向轮组26以及分别设置在轨道1两侧壁12的两个行走单元24;密封设备仓21内设置有充电电池25。
[0093]
每个行走单元24包括活动支撑台241、行走轮242以及设置在行走轮242下方且驱动行走轮242转动的行走电机243,行走电机243与充电电池25相连,充电电池25向行走电机243提供电能使行走电机243动作,行走电机243驱动其上的行走轮242转动,带动挂轨机器人2整体在轨道1上行走;活动支撑台241用于将行走轮242压紧在轨道1侧壁12上,同时,行走轮242可在外力作用下,与轨道1侧壁12脱离接触。活动支撑台241用于将行走轮242压紧在轨道1的侧壁12上,本实施例活动支撑台241包括转轴2411、支撑板2412、调节导向轴2413和弹性件2414,转轴2411平行与行走电机243输出轴设置在密封设备仓21上,支撑板2412的中部与行走电机243固连,且支撑板2412的一端活动连接在转轴2411上,支撑板2412可绕转轴2411转动,支撑板2412的另一端端部开设有过孔24121,本实施例中过孔24121为沿水平方向设置的长条孔;调节导向轴2413内端部穿过过孔24121后通过立板与密封设备仓21固连,调节导向轴2413的外端部设有限位结构,弹性件2414的两端抵靠于支撑板2412和调节导向轴2413外端部,用于将行走轮242压紧在工字轨1侧壁12上,本实施例弹性件2414为弹簧,弹簧套装在调节导向轴2413上且位于支撑板2412和调节导向轴2413外端部之间;行走轮242的转轴2411上端设置有第一卡扣件2421。
[0094]
能量转换机构位于轨道1上方,能量转换机构包括下安装板31、上安装板32、多个导向轴33、驱动机构34、行走轮推开机构以及两个能量对接单元35。
[0095]
上安装板32平行设置在下安装板31的上方;多个导向轴33的下端与下安装板31固定连接,上端与上安装板32获得连接,上安装板32上安装有与导向轴33配合的直线轴承38,直线轴承38与导向轴33配合使用,可上下做直线运动;驱动机构34设置在下安装板31上,用于驱动上安装板32沿导向轴33移动;行走轮推开机构包括驱动电机371、水平设置的螺杆372以及两个螺母373;驱动电机371设置在上安装板32上;螺杆372的两端分别通过支座轴承376支撑在上安装板32的下底面上,且螺杆372的一端与驱动电机371输出相连;两个螺母373设置在螺杆372上,两个螺母373能够被螺杆372带动沿螺杆372轴线相向运动或相背运动,本实施例螺杆372可为正反丝杆,即螺杆372包括螺纹方向相反的第一轴段和第二轴段,两个螺母373分别设置在第一轴段和第二轴段上,驱动电机371为分离电机;在其它实施例中,也可将螺杆372设计为丝杆,两个螺母373的螺纹旋向相反。
[0096]
两个能量对接单元35分别设置在两个螺母373上,每个能量对接单元35包括设置在螺母373上的能量转换电机351以及位于上安装板32下方且与能量转换电机351输出轴相连的第二卡扣件352,能量转换电机351输出轴的轴线与导向轴33的轴线平行,下安装板31上设有供第二卡扣件352伸出的缺口311,第二卡扣件352用于与第一卡扣件2421卡接,使能量转换电机351和挂轨机器人2的行走轮242同步移动和转动。。
[0097]
在挂轨机器人2需要充电时,挂轨机器人2移至能量对接单元35下方,驱动机构34驱动上安装板32向下移动,进而带动两个能量对接单元35向下移动,使两个能量转换电机351输出轴上的第二卡扣件352分别穿过下安装板31上的缺口311与挂轨机器人2的两个行走轮242上的第一卡扣件2421卡接;驱动电机371驱动螺杆372转动,使两个螺母373沿螺杆372轴线相背运动,由于能量转换电机351与螺母373固连,能量转换电机351输出轴上的第二卡扣件352与个行走轮242上的第一卡扣件2421卡接,两个能量对接单元35带动两个行走轮242相背运动,推动行走电机243绕转轴2411向外移动,同时弹性件2414被压缩,行走电机243向外移动,使得行走电机243上的行走轮242与轨道1侧壁12脱离接触,然后在能量转换电机351驱动下,实现能量转换电机351输出轴与行走轮242同步转动,行走轮242转动过程产生的电能经行走电机243、密封设备仓21内的转换电路板后存储至充电电池25,实现挂轨机器人2的充电。
[0098]
为了提高螺母373带动能量转换电机351移动的稳定性,本实施例行走轮推开机构还包括导向组件,导向组件包括平行于螺杆372设置在下安装板31侧面上的直线导轨374以及设置在直线导轨374上且分别与两个螺母373配合的两个滑块375,两个能量转换电机351通过u型电机安装架36分别设置在两个螺母373以及相应的滑块375上,每个u型电机安装架36包括形成u型结构且依次连接的螺母安装板361、电机安装板362和滑块安装板363,螺母安装板361与螺母373固连,滑块安装板363与滑块375固连,能量转换电机351设置在电机安装板362上,且电机安装板362上设有供能量转换电机输出轴穿过的通孔。
[0099]
本发明第一卡扣件2421和第二卡扣件352需实现卡接,使行走轮242能够随能量转换电机351输出轴同步动作,本实施例第二卡扣件352为旋转轴套,其内壁沿轴向开设有圆周均布的多个凹槽,第一卡扣件2421为旋转轴,其外表面设有与多个凹槽配合的多个凸块。
[0100]
本实施例能量对接单元35还包括驱动轴353、弹簧354和挡圈355;驱动轴353的上部中心开设有盲孔3533,能量转换电机351输出轴设置在该盲孔3533内,实现驱动轴353与能量转换电机351输出轴的同轴固连,驱动轴353的上外端部设有第一环形限位凸台3531,
下外端部设有第二环形凸台3532;弹簧354和挡圈355均套装在驱动轴353中部,且弹簧354的两端分别通过第一环形限位凸台3531下端面和挡圈355上端面限位,挡圈355下端面通过第二环形凸台3532上端面限位;第二卡扣件352的上部采用花键连接方式固定套装在驱动轴353的下部,且与挡圈355固连。
[0101]
在驱动机构34驱动上安装板32(能量对接单元35)向下移动过程中,当旋转轴套的凹槽与旋转轴的凸块对正时,随着上安装板32的下移,旋转轴装入旋转轴套内,实现旋转轴套和旋转轴的连接,即能量转换电机351输出轴与行走轮242的同轴连接;当旋转轴套的凹槽与旋转轴的凸块未对正时,随着上安装板32的下移,旋转轴的上端面和旋转轴套的下端面抵靠,能量转换电机351输出轴相对旋转轴套向下移动,弹簧354被压缩,直至能量转换电机351输出轴与旋转轴接触,在能量转换电机351微转动下,使旋转轴套上的凹槽发生转动,进而使旋转轴的凸块与旋转轴套的凹槽对正,旋转轴套向下移动,旋转轴装入旋转轴套内,实现旋转轴套和旋转轴的连接,即能量转换电机351输出轴与行走轮242的同轴连接。
[0102]
为了实现挂轨机器人2在机器人充电装置处的精确定位,本实施例机器人充电装置还包括设置在上安装板32上且位于轨道1上方的挡停机构39,挡停机构39包括设置在上安装板32上动作电缸391、设置在动作电缸391下端(驱动端)的挡停定位板392以及给挡停定位板392移动提供导向作用的挡停导向轴393,挡停定位板392下端面设有用于与挂轨机器人2上端面定位销配合的第一定位销孔,动作电缸391驱动挡停定位板392下行,挡停定位板392上的第一定位销孔与挂轨机器人2上端面定位销配合,用于阻挡挂轨机器人2,实现挂轨机器人2到位停止。
[0103]
本实施例中驱动机构34可为气缸,其包括缸体和与缸体配合的推动杆,缸体设置在下安装板31上,推动杆的驱动端与上安装板32固连。在其他实施例中,驱动机构34也可为电缸,其包括缸体和和与缸体配合电动推杆,缸体设置在下安装板31上,电动推杆的驱动端与上安装板32固连。
[0104]
本实施例挂轨机器人2系统的工作过程:
[0105]
1)挂轨机器人2在轨道1上运行,当挂轨机器人2的充电电池25电量低于设定值时,挂轨机器人2到达充电位置(能量转换机构下方),动作电缸391驱动挡停定位板392下行,挡停定位板392上的第一定位销孔与挂轨机器人2上端面定位销配合,实现挂轨机器人2精确定位;
[0106]
2)启动驱动机构34,驱动机构34驱动上安装板32沿导向轴33在竖直方向向下移动,上安装板32上的能量转换机构同步向下移动,直至两个能量转换电机351输出轴的旋转轴套分别卡装入行走轮242的旋转轴内;
[0107]
3)驱动电机371驱动螺杆372转动,使两个螺母373沿螺杆372轴线相背运动,由于能量转换电机351与螺母373固连,能量转换电机351输出轴上的第二卡扣件352与两个行走轮242上的第一卡扣件2421卡接,则两个能量对接单元35带动两个行走轮242相背运动,推动行走电机243绕转轴2411向外移动,同时弹性件2414被压缩,行走电机243向外移动,使得行走电机243上的行走轮242与轨道1侧壁12脱开;
[0108]
4)外部动力源驱动能量转换电机351转动,实现能量转换电机351输出轴上的旋转轴套旋转,进而带动行走轮242的同步转动,行走轮242带动行走电机243反向旋转,将能量转换电机351的动能传递至挂轨机器人2的行走电机243,行走电机243反向旋转发电产生电
流,产生的电流通过密封设备仓21内的电路存储至充电电池25,从而实现挂轨机器人2端电机动能向电能的转换,完成挂轨机器人充电。
[0109]
充电完成后,驱动电机371驱动螺杆372反向转动,使两个螺母373沿螺杆372轴线相向运动,进而带动两个行走轮242相向运动,由于弹性件2414的恢复力,行走电机243复位,行走电机243上的行走轮242与轨道1侧壁12接触,可实现行走轮242可在轨道1上行走。
[0110]
本发明将外部安全动力源(外部动力源:电机、油缸、压缩空气、液压、人工等)通过能量转换电机351旋转转换为动能,再通过能量转换电机351下方的旋转轴套与行走轮242上旋转轴相互卡接,将动能传递至行走电机243,行走电机243反向旋转发电,以达到将动能转换为电能,储存至充电电池25中,实现挂轨机器人2在易爆环境下的安全充电。
[0111]
实施例三
[0112]
与实施例一不同之处在于:如图10所示,能量转换机构还包括行走轮推开机构,能量对接单元35通过行走轮推开机构设置在上安装板32上;
[0113]
行走轮推开机构与实施例二的结构相同,包括驱动电机371、螺杆372以及两个螺母373;驱动电机371设置在上安装板32上;螺杆372支撑在上安装板32下方,且与驱动电机371输出相连;两个螺母373设置在螺杆372上,能够被螺杆372带动沿螺杆372轴线相向运动或相背运动;两个能量对接单元35的能量转换电机351分别与两个螺母373固连。
[0114]
行走轮242与轨道侧壁12脱开也可通过能量转换机构实现,在挂轨机器人2需要充电时,挂轨机器人2移至能量对接单元35下方,驱动机构34驱动上安装板32向下移动,进而带动两个能量对接单元35向下移动,使两个能量转换电机351输出轴上的第二卡扣件352分别穿过下安装板31上的缺口311与挂轨机器人2的两个行走轮242上的第一卡扣件2421卡接;驱动电机371驱动螺杆372转动,使两个螺母373沿螺杆372轴线相背运动,由于能量转换电机351与螺母373固连,能量转换电机351输出轴上的第二卡扣件352与个行走轮242上的第一卡扣件2421卡接,两个能量对接单元35带动两个行走轮242相背运动,推动行走电机243绕转轴2411向外移动,同时弹性件2414被压缩,行走电机243向外移动,使得行走电机243上的行走轮242与轨道1侧壁12脱离接触,然后在能量转换电机351驱动下,实现能量转换电机351输出轴与行走轮242同步转动,行走轮242转动过程产生的电能经行走电机243、密封设备仓21内的转换电路板后存储至充电电池25,实现挂轨机器人2的充电。
[0115]
实施例四
[0116]
与实施例一至三不同之处在于:如图11a和图11b所示,本实施例第一卡扣件2421为旋转轴,其径向截面为多边形,相应的,第二卡扣件352为旋转轴套,其内表面与旋转轴外表面相适配。
[0117]
实施例五
[0118]
与实施例一至三不同之处在于:如图12a和图12b所示,第一卡扣件2421可为第一旋转卡扣盘,其上端面沿径向设有圆周布置的多个第一卡齿2422,所述第二卡扣件352为第二旋转卡扣盘,其下端面设有与第一卡齿2422配合的多个第二卡齿3521。
[0119]
实施例六
[0120]
与实施例一至三不同之处在于:如图13a和图13b所示,第一卡扣件2421可为锥形旋转轴,其外侧锥面设有第一齿形结构,第二卡扣件352为锥形旋转套,其内侧锥面设有与第一齿形结构配合的第二齿形结构,锥形旋转套内侧锥面与锥形旋转轴外锥面相适配。
[0121]
以上仅是对本发明的优选实施方式进行了描述,并不将本发明的技术方案限制于此,本领域技术人员在本发明主要技术构思的基础上所作的任何变形都属于本发明所要保护的技术范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。