基于ai地磁的巡检车控制方法与系统
技术领域
1.本发明涉及智能停车技术领域,尤其涉及基于ai地磁的巡检车控制方法与系统。
背景技术:
2.巡检车应用于各种各样的领域,如轨道检测巡检车、道路巡检车以及环境巡检车等。停车场是供车辆停放之场所。停车场有仅画停车格而无人管理及收费的简易停车场,亦有配有出入栏口、泊车管理员及计时收款员的收费停车场。现代化的停车场常有自动化计时收费系统、闭路电视及录影机系统。人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,可以设想,未来人工智能带来的科技产品,将会是人类智慧的
″
容器
″
。人工智能可以对人的意识、思维的信息过程的模拟。人工智能不是人的智能,但能像人那样思考、也可能超过人的智能。ai地磁定位的优势在于不需要借助其他器械,单纯靠一台智能设备就能够进行数据采集和定位,算法简单易实现,有自我纠偏的功能,误差不会累计。
3.现有的停车场内通常会在出入口和停车场内的一些节点上设置摄像头,这些摄像头只能用于出入车辆的监控,但是对于停车场内的停车位状况以及车辆的停车规范不能进行很好的监控,停车场的范围较大,且车辆的出入情况较多,单靠人工进行监管很难做到对停车场内的停车位进行合理的资源分配和监管。
技术实现要素:
4.针对现有技术存在的不足,本发明目的是提供基于ai地磁的巡检车控制方法与系统,通过巡检车能够对停车场内的空余车位以及占用车位和停车路径的障碍物进行识别,以解决现有的停车场的管控不够智能有效的问题。
5.为了实现上述目的,本发明是通过如下的技术方案来实现:基于ai地磁的巡检车控制方法,所述控制方法包括如下步骤:
6.步骤s1,当识别到停车路径上具备障碍物时,切换ai地磁定位模块对障碍物位置进行定位,并切换通讯模块将障碍物信息以及障碍物的定位信息发送至维护终端;
7.步骤s2,当识别到有违停车辆时,切换ai地磁定位模块对违停车辆的位置进行定位,并切换通讯模块将违停车辆的信息以及违停车辆的定位信息发送至维护终端;
8.步骤s3,当识别到有空余车位时,切换ai地磁定位模块对空余车位进行定位,并切换通讯模块将空余车位的信息以及空余车位的定位信息发送至维护终端。
9.进一步地,所述步骤s1还包括:通过巡检车对停车路径进行识别,并对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;
10.对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;
11.当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物
信号时,通知其他障碍物维护人员进行维护。
12.进一步地,所述步骤s2还包括:对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息;
13.当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;
14.当接收到第一车辆违停信号时,通知车辆维护人员进行维护。
15.进一步地,所述步骤s3还包括:对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输出该空余停车位以及空余停车位的定位信息;
16.将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;
17.获取空余车位的定位信息,并与地图数据库内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出。
18.进一步地,所述步骤s3还包括:对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;
19.当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。
20.基于ai地磁的巡检车控制方法的控制系统,所述控制系统包括地图数据库、ai地磁定位模块、检测模块、处理模块以及通讯模块,所述地图数据库存储有停车场的停车路径信息和车位位置信息,所述ai地磁定位模块用于获取巡检车的位置信息,所述检测模块用于对停车场的场景信息进行获取,所述处理模块用于根据获取的场景信息进行处理并控制驱动模块驱动巡检车进行运作,所述通讯模块用于与维护终端通讯连接;
21.所述处理模块包括信息处理单元以及模式转换单元,所述信息处理单元包括障碍物处理子单元、违规停放处理子单元以及车位识别子单元;
22.所述障碍物处理子单元配置有障碍物信息处理策略,所述障碍物信息处理策略包括:当巡检车沿停车路径进行行进时,对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;
23.所述违规停放处理子单元配置有违规停放处理策略,所述违规停放处理策略包括:对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息;
24.所述车位识别子单元配置有车位识别策略,所述车位识别策略包括:对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输出该空余停车位以及空余停车位的定位信息;
25.所述模式切换单元配置有模式切换策略,所述模式切换策略包括:当识别到停车路径上具备障碍物时,切换ai地磁定位模块对障碍物位置进行定位,并切换通讯模块将障碍物信息以及障碍物的定位信息发送至维护终端;当识别到有违停车辆时,切换ai地磁定位模块对违停车辆的位置进行定位,并切换通讯模块将违停车辆的信息以及违停车辆的定位信息发送至维护终端;当识别到有空余车位时,切换ai地磁定位模块对空余车位进行定
位,并切换通讯模块将空余车位的信息以及空余车位的定位信息发送至维护终端。
26.进一步地,所述障碍物处理策略还包括:对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;
27.所述维护终端配置有车辆维护人员以及其他障碍物维护人员,所述维护终端配置有维护策略,所述维护策略包括:当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物信号时,通知其他障碍物维护人员进行维护。
28.进一步地,所述违规停放处理策略还包括:对违规车辆的停放两侧和前后进行识别,当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;
29.所述维护策略还包括:当接收到第一车辆违停信号时,通知车辆维护人员进行维护。
30.进一步地,所述地图数据库配置有车位标记策略,所述车位标记策略包括:将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;
31.所述车位识别策略还包括:获取空余车位的定位信息,并与地图数据库内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出。
32.进一步地,所述车位识别策略还包括:对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;
33.所述维护策略还包括:当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。
34.本发明的有益效果:本发明当识别到停车路径上具备障碍物时,切换ai地磁定位模块对障碍物位置进行定位,并切换通讯模块将障碍物信息以及障碍物的定位信息发送至维护终端;当识别到有违停车辆时,切换ai地磁定位模块对违停车辆的位置进行定位,并切换通讯模块将违停车辆的信息以及违停车辆的定位信息发送至维护终端;当识别到有空余车位时,切换ai地磁定位模块对空余车位进行定位,并切换通讯模块将空余车位的信息以及空余车位的定位信息发送至维护终端,能够通过巡检车及时有效的对停车路径以及空余车位上的障碍物进行识别,从而及时通知维护终端进行维护,能够对停车场的停车资源进行有效的管控,提高了停车场的资源利用率。
附图说明
35.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
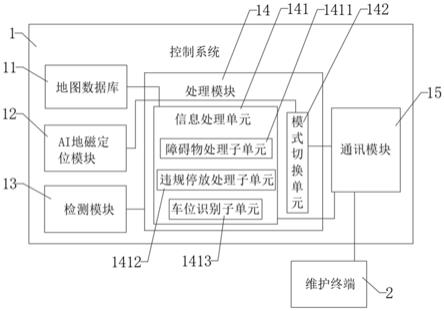
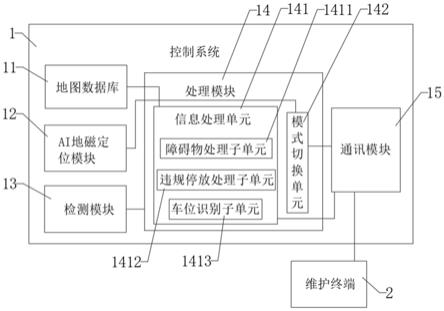
36.图1为本发明的控制系统的原理框图图;
37.图2为本发明的控制方法的流程图。
38.图中:1、控制系统;11、地图数据库;12、ai地磁定位模块;13、检测模块;14、处理模块;141、信息处理单元;1411、障碍物处理子单元;1412、违规停放处理子单元;1413、车位识别子单元;142、模式切换单元;15、通讯模块;2、维护终端。
具体实施方式
39.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合
具体实施方式,进一步阐述本发明。
40.请参阅图1,基于ai地磁的巡检车控制方法的控制系统1,所述控制系统1包括地图数据库11、ai地磁定位模块12、检测模块13、处理模块14以及通讯模块15,所述地图数据库11存储有停车场的停车路径信息和车位位置信息,所述ai地磁定位模块12用于获取巡检车的位置信息,ai地磁定位模块12采用ai地磁定位传感器,所述检测模块13用于对停车场的场景信息进行获取,所述处理模块14用于根据获取的场景信息进行处理并控制驱动模块驱动巡检车进行运作,所述通讯模块15用于与维护终端2通讯连接。通过巡检车进行停车路径和空余车位的巡检,能够及时发现停车路径以及空余车位上的障碍物,从而及时通知维护终端2进行维护,对于停车场的规范化进行及时监控。
41.所述处理模块14包括信息处理单元141以及模式转换单元,所述信息处理单元141包括障碍物处理子单元1411、违规停放处理子单元1412以及车位识别子单元1413。
42.所述障碍物处理子单元1411配置有障碍物信息处理策略,所述障碍物信息处理策略包括:当巡检车沿停车路径进行行进时,对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库11中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;当识别到的路径与地图数据库11中的图片不一致时,进行障碍物的识别,能够及时有效发现障碍物。
43.所述违规停放处理子单元1412配置有违规停放处理策略,所述违规停放处理策略包括:对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息,通过对车辆的停车状态进行识别,能够及时发现多占用车位的车辆,并通过维护终端2及时联系车主进行挪车,避免停车资源的浪费。
44.所述车位识别子单元1413配置有车位识别策略,所述车位识别策略包括:对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输出该空余停车位以及空余停车位的定位信息;通过及时识别空余车位,能够对停车场的空余车位进行及时的统计,并输出定位信息,便于新进入停车场的车辆快速寻找到空余车位,提高了停车的效率。
45.所述模式切换单元142配置有模式切换策略,所述模式切换策略包括:当识别到停车路径上具备障碍物时,切换ai地磁定位模块12对障碍物位置进行定位,并切换通讯模块15将障碍物信息以及障碍物的定位信息发送至维护终端2;当识别到有违停车辆时,切换ai地磁定位模块12对违停车辆的位置进行定位,并切换通讯模块15将违停车辆的信息以及违停车辆的定位信息发送至维护终端2;当识别到有空余车位时,切换ai地磁定位模块12对空余车位进行定位,并切换通讯模块15将空余车位的信息以及空余车位的定位信息发送至维护终端2。通过模式的快速切换,能够提高对停车场内各种状态下的及时监控。
46.所述障碍物处理策略还包括:对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;所述维护终端2配置有车辆维护人员以及其他障碍物维护人员,所述维护终端2配置有维护策略,所述维护策略包括:当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物信号时,通知其他障碍物维护人员进行维护。将障碍物信息分成车辆障碍物和其他障碍物,能
够提高障碍物处理的效率,车辆障碍物一般由停车场的进出口管理人员进行处理,该维护人员掌握着停车用户的信息,能够便于及时通知车主;其他障碍物的维护人员通常为清理人员,能够对无关的障碍物进行直接的清理,提高了维护人员的配置合理性。
47.所述违规停放处理策略还包括:对违规车辆的停放两侧和前后进行识别,当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;所述维护策略还包括:当接收到第一车辆违停信号时,通知车辆维护人员进行维护。当车辆的两侧压线或跨线时会影响到两侧车辆的停放,当前后压线或跨线时,对于两侧的车辆停放的影响不大。
48.所述地图数据库11配置有车位标记策略,所述车位标记策略包括:将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;所述车位识别策略还包括:获取空余车位的定位信息,并与地图数据库11内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出。对空余车位进行标号,能够提高车位寻找的效率。
49.所述车位识别策略还包括:对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;所述维护策略还包括:当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。通过其他障碍物维护人员,能够对空余车位上的其他障碍物进行及时清除。
50.请参阅图2,基于人工智能的巡检车多模式的控制方法,所述控制方法包括如下步骤:
51.步骤s1,当识别到停车路径上具备障碍物时,切换ai地磁定位模块12对障碍物位置进行定位,并切换通讯模块15将障碍物信息以及障碍物的定位信息发送至维护终端2;
52.通过巡检车对停车路径进行识别,并对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库11中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;
53.对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;
54.当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物信号时,通知其他障碍物维护人员进行维护。
55.步骤s2,当识别到有违停车辆时,切换ai地磁定位模块12对违停车辆的位置进行定位,并切换通讯模块15将违停车辆的信息以及违停车辆的定位信息发送至维护终端2;
56.对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息;
57.当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;
58.当接收到第一车辆违停信号时,通知车辆维护人员进行维护。
59.步骤s3,当识别到有空余车位时,切换ai地磁定位模块12对空余车位进行定位,并切换通讯模块15将空余车位的信息以及空余车位的定位信息发送至维护终端2;
60.对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输
出该空余停车位以及空余停车位的定位信息;
61.将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;
62.获取空余车位的定位信息,并与地图数据库11内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出;
63.对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;
64.当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。
65.最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。