技术特征:
1.基于ai地磁的巡检车控制方法,其特征在于,所述控制方法包括如下步骤:步骤s1,当识别到停车路径上具备障碍物时,对障碍物位置进行定位,并将障碍物信息以及障碍物的定位信息发送至维护终端(2);步骤s2,当识别到有违停车辆时,对违停车辆的位置进行定位,并将违停车辆的信息以及违停车辆的定位信息发送至维护终端(2);步骤s3,当识别到有空余车位时,对空余车位进行定位,并将空余车位的信息以及空余车位的定位信息发送至维护终端(2)。2.根据权利要求1所述的基于ai地磁的巡检车控制方法,其特征在于,所述步骤s1还包括:通过巡检车对停车路径进行识别,并对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库(11)中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物信号时,通知其他障碍物维护人员进行维护。3.根据权利要求2所述的基于ai地磁的巡检车控制方法,其特征在于,所述步骤s2还包括:对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息;当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;当接收到第一车辆违停信号时,通知车辆维护人员进行维护。4.根据权利要求3所述的基于ai地磁的巡检车控制方法,其特征在于,所述步骤s3还包括:对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输出该空余停车位以及空余停车位的定位信息;将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;获取空余车位的定位信息,并与地图数据库(11)内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出。5.根据权利要求4所述的基于ai地磁的巡检车控制方法,其特征在于,所述步骤s3还包括:对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。6.根据权利要求1
‑
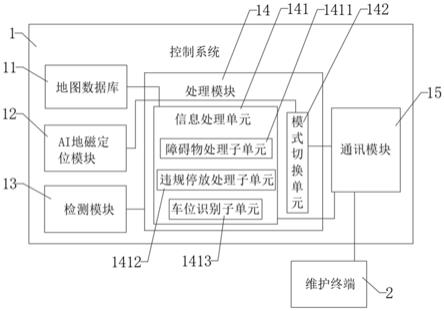
5任一项所述的基于ai地磁的巡检车控制方法的控制系统,其特征在于,所述控制系统(1)包括地图数据库(11)、ai地磁定位模块(12)、检测模块(13)、处理模块(14)以及通讯模块(15),所述地图数据库(11)存储有停车场的停车路径信息和车位位置信息,所述ai地磁定位模块(12)用于获取巡检车的位置信息,所述检测模块(13)用于对停车场的场景信息进行获取,所述处理模块(14)用于根据获取的场景信息进行处理并控制驱
动模块驱动巡检车进行运作,所述通讯模块(15)用于与维护终端(2)通讯连接;所述处理模块(14)包括信息处理单元(141)以及模式转换单元,所述信息处理单元(141)包括障碍物处理子单元(1411)、违规停放处理子单元(1412)以及车位识别子单元(1413);所述障碍物处理子单元(1411)配置有障碍物信息处理策略,所述障碍物信息处理策略包括:当巡检车沿停车路径进行行进时,对沿停车路径获取的图片进行进行识别,并获取巡检车的定位信息;从地图数据库(11)中抽取该定位信息下的停车路径信息,并与获取到的图片进行比对,当识别到图片中有多余物体存在时,输出第一障碍物信号以及障碍物的位置信息;所述违规停放处理子单元(1412)配置有违规停放处理策略,所述违规停放处理策略包括:对停车位上的车辆的停放位置依次进行识别,识别停车位的框线是否有车辆跨线或压线的状态,当识别到停车位上的车辆有压线和跨线车位的问题时,输出车辆违停信号以及违停车辆的位置信息;所述车位识别子单元(1413)配置有车位识别策略,所述车位识别策略包括:对空余的停车位进行识别,识别到空余的停车位时对该空余停车位进行定位,输出该空余停车位以及空余停车位的定位信息;所述模式切换单元(142)配置有模式切换策略,所述模式切换策略包括:当识别到停车路径上具备障碍物时,切换ai地磁定位模块(12)对障碍物位置进行定位,并切换通讯模块(15)将障碍物信息以及障碍物的定位信息发送至维护终端(2);当识别到有违停车辆时,切换ai地磁定位模块(12)对违停车辆的位置进行定位,并切换通讯模块(15)将违停车辆的信息以及违停车辆的定位信息发送至维护终端(2);当识别到有空余车位时,切换ai地磁定位模块(12)对空余车位进行定位,并切换通讯模块(15)将空余车位的信息以及空余车位的定位信息发送至维护终端(2)。7.根据权利要求6所述的基于人工智能的巡检车多模式的控制系统,其特征在于,所述障碍物处理策略还包括:对障碍物图片进行识别,并将图片中的障碍物分为车辆障碍物以及其他障碍物,并输出车辆障碍物信号和其他障碍物信号;所述维护终端(2)配置有车辆维护人员以及其他障碍物维护人员,所述维护终端(2)配置有维护策略,所述维护策略包括:当接收到车辆障碍物信号时,通知车辆维护人员进行维护;当接收到其他障碍物信号时,通知其他障碍物维护人员进行维护。8.根据权利要求7所述的基于人工智能的巡检车多模式的控制系统,其特征在于,所述违规停放处理策略还包括:对违规车辆的停放两侧和前后进行识别,当识别到车辆的两侧存在压线或跨线时,输出第一车辆违停信号;当识别到车辆的前后存在压线或跨线时,输出第二车辆违停信号;所述维护策略还包括:当接收到第一车辆违停信号时,通知车辆维护人员进行维护。9.根据权利要求8所述的基于人工智能的巡检车多模式的控制系统,其特征在于,所述地图数据库(11)配置有车位标记策略,所述车位标记策略包括:将停车场内的车位分别进行标号,每一个标号分别对应一个车位以及该车位的位置信息;所述车位识别策略还包括:获取空余车位的定位信息,并与地图数据库(11)内标记好的车位的位置信息进行比对,将比对相同的车位的标号输出。
10.根据权利要求9所述的基于人工智能的巡检车多模式的控制系统,其特征在于,所述车位识别策略还包括:对空余车位进行障碍物识别,当识别到空余车位上存在其他障碍物时,输出第二障碍物信号;所述维护策略还包括:当接收到第二障碍物信号时,通知其他障碍物维护人员进行维护。
技术总结
本发明提供基于AI地磁的巡检车控制方法与系统,所述控制方法包括如下步骤:步骤S1,当识别到停车路径上具备障碍物时,切换AI地磁定位模块对障碍物位置进行定位,并切换通讯模块将障碍物信息以及障碍物的定位信息发送至维护终端;步骤S2,当识别到有违停车辆时,切换AI地磁定位模块对违停车辆的位置进行定位,并切换通讯模块将违停车辆的信息以及违停车辆的定位信息发送至维护终端;步骤S3,当识别到有空余车位时,切换AI地磁定位模块对空余车位进行定位。本发明通过巡检车能够对停车场内的空余车位以及占用车位和停车路径的障碍物进行识别,以解决现有的停车场的管控不够智能有效的问题。的问题。的问题。
技术研发人员:李长平 田华 邵威烈 吴春辉
受保护的技术使用者:厦门中卡科技股份有限公司
技术研发日:2021.08.25
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。