技术特征:
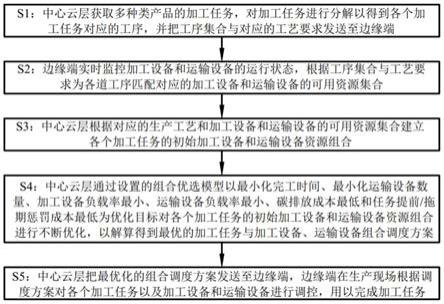
1.一种云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于,包括:s1:中心云层获取多种类产品的加工任务,对加工任务进行分解以得到各个加工任务对应的工序,并把工序集合与对应的工艺要求发送至边缘端;s2:边缘端实时监控加工设备和运输设备的运行状态,根据工序集合与工艺要求为各道工序匹配对应的加工设备和运输设备的可用资源集合;s3:中心云层根据对应的生产工艺和加工设备和运输设备的可用资源集合建立各个加工任务的初始加工设备和运输设备资源组合;s4:中心云层通过设置的组合优选模型以最小化完工时间、最小化运输设备数量、加工设备负载率最小、运输设备负载率最小、碳排放成本最低和任务提前/拖期惩罚成本最低为优化目标对各个加工任务的初始加工设备和运输设备资源组合进行不断优化,以解算得到最优的加工任务与加工设备、运输设备组合调度方案;s5:中心云层把最优化的组合调度方案发送至边缘端,边缘端在生产现场根据调度方案对各个加工任务以及加工设备和运输设备进行调控,用以完成加工任务。2.如权利要求1所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于:步骤s1中,中心云层根据产品加工的业务逻辑和工艺流程将对应的加工任务分解成若干个可以被单个加工设备完成的工序,生成工序集合与对应的工艺要求并发送给边缘端。3.如权利要求1所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于,步骤s2中,边缘端根据设备的运行状态为工序匹配加工设备和运输设备可用资源集合时,满足以下约束条件:同一时刻,一台运输设备只承载一个运输任务、每个加工设备只能加工一个工件,运输设备开始运行后不能中断;每一道工序只能在对应类型的工作站完成;工序的加工顺序必须遵守生产工艺的规定,工序的加工顺序不能发生混乱;第r辆运输设备把工件从工序o
i,k
‑1加工处运输至工序o
i,k
加工处的最早开始时间应大于等于运输设备上一装载任务的完成时间和工件上一道工序o
i,k
‑1的完成时间工序o
i,k
的最早开始时间应大于等于运输设备完成装载时间和加工设备m
j,h
上一个加工任务的结束时间4.如权利要求1述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于:步骤s3中,中心云层按照顺序、并行、选择以及循环的生产工艺,从加工设备和运输设备可用资源集合中选取各个工序的加工设备和运输设备,以建立对应加工任务的初始加工设备和运输设备资源组合。5.如权利要求1所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于:步骤s4中,所述组合优选模型基于鲸鱼算法构建,并基于莱维飞行和模糊支配关系实现模型求解,中心云层以能够以优化目标量化评估初始加工设备和运输设备资源组合,进而得到最优的加工任务与加工设备、运输设备组合调度方案。6.如权利要求1所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征
在于:最小化完工时间通过公式minf1=max(time
i
)表示;式中:i表示加工任务编号,time
i
表示第k道工序的完工时间,包括加工时间运输时间和等待时间,具体通过如下公式计算:式中:表示工序o
i,k
开始加工时刻;表示工序o
i,k
完成加工时刻;表示工序o
i,k
在工作站m
j,h
的加工时间;表示工序o
i
′
,k
′
完成后,第r辆运输设备开始装载工件至工序o
i,k
所在机床缓存区的时刻;表示第r辆运输设备完成装载工序o
i,k
的时刻;表示第r台运输设备从设备j1搬运工件至设备j2所需要的时间;最小化运输设备数量通过公式min f2=max(r);式中:r表示运输设备数量;加工设备负载率最小通过如下公式表示:式中:表示加工设备m
j,h
的最小负载率,表示加工设备m
j,h
的最大负载率;运输设备负载率最小通过如下公式表示:式中:ea
r
表示第r辆运输设备的最小负载率,da
r
表示第r辆运输设备的最大负载率;任务提前/拖期惩罚成本通过如下公式表示:式中:et
k
表示加工任务的最小完成时间,dt
k
表示加工任务的最大完成时间;当time
k
<et
k
时,表示提前完成了任务,不满意程度增大;time
k
>dt
k
时,表示任务延期完成,惩罚值增大;碳排放成本最低通过如下公式表示:
式中:c
j,h
表示工作站m
j,h
的单位加工时间碳排放成本;pt
j,h
表示工作站m
j,h
的总加工运行时间。7.如权利要求5所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于:所述组合优选模型中用每只鲸鱼表示一个加工任务与加工设备、运输设备组合调度方案,并采用等长三段式编码的方式表示鲸鱼的位置矩阵;鲸鱼的位置矩阵中,第一个维度表示所有加工任务的工序顺序链,第二个维度表示每道工序对应的机床设备顺序链,第三个维度表示每道工序对应的运输设备顺序链。8.如权利要求7所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于:通过如下步骤对迭代后的鲸鱼位置向量进行调整:对于迭代后的工序编码:将位置更新后的工序向量按数值大小从小到大到排序后得到新的向量,然后把新编码和初始编码的值进行一一对应,得到修正后编码的原始位置;对于迭代后的加工设备编码:首先对编码进行四舍五入得到整数;然后对超过取值范围的编码进行处理,将所有超出加工设备总数上限的取值为上限,低于下限的取值为1;最后得到新的加工设备编码,且始终与工序的初始编码对应;对于迭代后的运输设备编码:首先对编码进行四舍五入得到整数;然后对超过取值范围的编码进行处理,将所有超出运输设备总数上限的取值为上限,低于下限的取值为1;最后得到新的运输设备编码,且始终与工序的初始编码对应。9.如权利要求5所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于,步骤s4中,通过如下步骤解算得到最优的加工任务与加工设备、运输设备组合调度方案:s401:初始化迭代次数t=1和最大迭代次数t
max
,并生成加工任务与加工设备、运输设备组合调度方案对应的初始种群x
(t)
;s402:对初始种群x(t)进行非支配排序并计算对应的拥挤度值;然后选择拥挤度值相对较大的个体生成精英解集archive;s403:合并初始种群x
(t)
和精英解集archive;然后进行鲸鱼位置解码并计算对应的适应度值;最后进行非支配排序并计算对应的拥挤度值,选择拥挤度相对较大的个体更新精英解集archive;s404:对精英解集archive进行模糊支配排序并计算对应的支配度值;最后选择支配度值相对较小的个体生成最优解集gbest;s405:对初始种群x
(t)
的鲸鱼位置进行迭代进化并生成对应的子代种群x
(t 1)
;然后更新迭代次数t=t 1,并判断t是否大于或等于最大迭代次数t
max
:若是,则输出最优解集gbest作为加工任务与加工设备、运输设备组合调度方案;否则,返回步骤s403。10.如权利要求9所述的云边协同环境下考虑运输设备的多目标组合调度方法,其特征在于,步骤405中,通过如下步骤对初始种群x
(t)
的鲸鱼位置进行迭代进化:通过如下公式计算系数变量a、a、c、ap:a=2
‑
2*t/t
max
;
a=2a*rand1‑
a;c=2*rand2;ap=min_ap max_ap*t/t
max
;式中:t表示当前迭代次数,t
max
表示最大迭代次数,a表示从2到0随迭代次数t线性递减的收敛因子,rand1和rand2均为[0,1]范围之间的随机数,系数变量a、c用于决定鲸鱼位置迭代的方向与步伐大小,ap表示随迭代次数t线性递增的意识概率;同时,设置p为[0,1]范围内均匀分布产生的随机数;当p≥ap时:1)若|a|≥1,则通过如下公式结合进行猎物包围:式中:x
t
、x
t 1
分别表示座头鲸在第t、t 1次迭代的位置,表示从当前种群中随机选择的个体;2)若|a|<1,则通过如下公式进行泡泡网攻击:式中:表示当前精英解集中随机选择的个体,b表示限定对数螺旋形状的常数,l表示[
‑
1,1]之间的随机数;若p<ap,则通过如下公式结合莱维飞行的方法进行猎物搜索:若p<ap,则通过如下公式结合莱维飞行的方法进行猎物搜索:若p<ap,则通过如下公式结合莱维飞行的方法进行猎物搜索:若p<ap,则通过如下公式结合莱维飞行的方法进行猎物搜索:式中:u、v服从标准正态分布,β表示系数常量,取值为1.5。
技术总结
本发明具体涉及一种云边协同环境下考虑运输设备的多目标组合调度方法,包括:中心云层对加工任务进行分解以得到对应的工序;边缘端根据工序集合与工艺要求为各道工序匹配加工设备和运输设备的可用资源集合;中心云层建立各个加工任务的初始加工设备和运输设备资源组合;中心云层对初始加工设备和运输设备资源组合进行不断优化,以解算得到最优的加工任务与加工设备、运输设备组合调度方案;中心云层把最优化的组合调度方案发送至边缘端,边缘端在生产现场对各个加工任务以及加工设备和运输设备进行调控。本发明中的多目标组合调度方法能够兼顾加工设备和运输设备运行实时性、可靠性和效率,从而能够提升多目标生产调度的调度效果和生产效率。调度效果和生产效率。调度效果和生产效率。
技术研发人员:李孝斌 江沛 刘宇杰 尹超 李坤
受保护的技术使用者:重庆大学
技术研发日:2021.08.25
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。