技术特征:
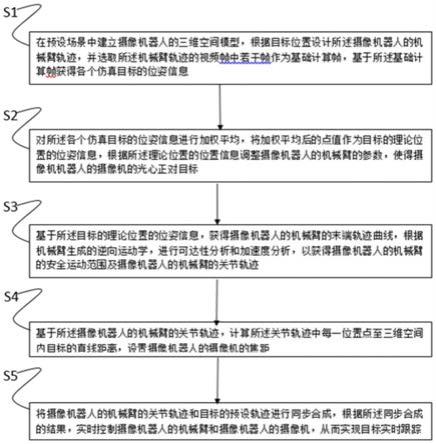
1.一种基于摄像机器人的目标跟踪方法,其特征在于,所述目标跟踪方法包括:步骤s1:在预设场景中建立摄像机器人的三维空间模型,根据目标位置设计所述摄像机器人的机械臂轨迹,并选取所述机械臂轨迹的视频帧中若干帧作为基础计算帧,基于所述基础计算帧获得各个仿真目标的位姿信息;步骤s2:对所述各个仿真目标的位姿信息进行加权平均,将加权平均后的点值作为目标的理论位置的位姿信息,根据所述理论位置的位置信息调整摄像机器人的机械臂的参数,使得摄像机机器人的摄像机的光心正对目标;步骤s3:基于所述目标的理论位置的位姿信息,获得摄像机器人的机械臂的末端轨迹曲线,根据机械臂生成的逆向运动学,进行可达性分析和加速度分析,以获得摄像机器人的机械臂的安全运动范围及摄像机器人的机械臂的关节轨迹;步骤s4:基于所述摄像机器人的机械臂的关节轨迹,计算所述关节轨迹中每一位置点至三维空间内目标的直线距离,设置摄像机器人的摄像机的焦距;步骤s5:将摄像机器人的机械臂的关节轨迹和目标的预设轨迹进行同步合成,根据所述同步合成的结果,实时控制摄像机器人的机械臂和摄像机器人的摄像机,从而实现目标实时跟踪。2.根据权利要求1所述的一种基于摄像机器人的目标跟踪方法,其特征在于,步骤s1中基于右手坐标系建立目标的三维空间模型。3.根据权利要求2所述的一种基于摄像机器人的目标跟踪方法,其特征在于,基于所述基础计算帧获得各个仿真目标的位姿信息之后,规划摄像机器人的机械臂的笛卡尔轨迹。4.根据权利要求3所述的一种基于摄像机器人的目标跟踪方法,其特征在于,所述步骤s3中通过可达性分析和加速度分析将机械臂的笛卡尔轨迹转换成关节轨迹。5.根据权利要求1所述的一种基于摄像机器人的目标跟踪方法,其特征在于,所述基于所述基础计算帧的计算方法为采用射线聚焦方法计算出各个仿真目标的位姿信息。6.根据权利要求1所述的一种基于摄像机器人的目标跟踪方法,其特征在于,所述步骤s2中的摄像机器人的机械臂的参数包括姿态滚动角,俯仰角和偏航角。
技术总结
本发明实施例公开了一种基于摄像机器人的目标跟踪方法。该基于摄像机器人的目标跟踪方法使得影视创作者能够在具有围绕目标跟踪物的过程拍摄需求中,能够只关注摄像机器人的机械臂的关键帧位置,利用目标跟踪算法在机械臂运动轨迹过程中,实时调整继续臂和摄像机,使得摄像机镜头实时对准目标物、摄像机镜头的焦距实时与目标物距离处于一致的位置。焦距实时与目标物距离处于一致的位置。焦距实时与目标物距离处于一致的位置。
技术研发人员:何健 褚轶 朱登明 朱正刚
受保护的技术使用者:太仓中科信息技术研究院
技术研发日:2021.08.18
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。