1.本实用新型属于智能家居技术领域,尤其涉及基于机器视觉的多维度除湿机器人。
背景技术:
[0002]“回南天”天气是华南地区在冬春季常见的一种较特别的天气,通常表现为空气十分潮湿,建筑物内墙壁、地板、家具等表面凝结大量的水滴,特别是不吸水的光面材料表面凝结水滴量更大,给人们的生活带来诸多不便。由于这种天气通常在冷空气过后转南风时出现,老百姓通俗的称这种天气为“回南天”。
[0003]
智能扫地机器人通常包括机体及设置在机体上的功能单元和线路规划单元。其中,功能单元根据机器人作用的不同又可以包括地面清扫模块、拖地模块、地面吸尘模块等,并配备相应的执行单元,比如,清扫模块包括毛刷、驱动毛刷转动的电机及吸尘风机和储尘仓等。线路规划单元根据结构原理的不同又可分为感应式线路规划模块和机器视觉线路规划模块。其中,感应式线路规划模块中使用的传感器通常包括超声波传感器和红外传感器。机器视觉线路规划模块通常是利用摄像头对机器人周边环境先进行一个全景的三维扫描,并在处理器当中建立好与周边环境对应的3d模型,并将该3d模型转换为二维平面图,再结合模块来完成路线规划。比如,公开号为cn111419117a的中国发明专利公开的是一种视觉扫地机器人返航控制方法及视觉扫地机器人。
[0004]
虽然目前市场上的扫地机器人具有扫地或拖地或吸尘等多种功能,但缺乏一种具有烘干除湿功能的扫地机器人,尤其是缺乏可以对墙面进行烘干除湿的智能机器人。
技术实现要素:
[0005]
本实用新型的目的在于克服现有技术的缺陷,提供了一种对墙面烘干除湿效果好的基于机器视觉的多维度除湿机器人。
[0006]
为实现上述目的,本实用新型所设计的基于机器视觉的多维度除湿机器人,包括机体、微控制器及与所述微控制器电连接的清扫单元、行走单元、除湿干燥单元和摄像头;
[0007]
所述清扫单元和所述行走单元均设于所述机体下端,所述清扫单元包括毛刷、驱动毛刷转动的电机、吸尘风机及与所述吸尘风机连通的储尘仓;所述行走单元包括行走轮;
[0008]
所述摄像头设于所述机体上端;
[0009]
所述除湿干燥单元包括加热半导体、冷凝铝片、导热铝片、风扇、冷凝水容器、进风口和出风口;所述机体内设有相连通的冷风通道和热风通道;所述加热半导体和所述风扇设于所述冷风通道和所述热风通道之间;所述加热半导体位于所述冷风通道一侧设有所述冷凝铝片;所述加热半导体位于所述热风通道一侧设有所述导热铝片;所述进风口和所述出风口分别设于所述机体侧壁,所述进风口与所述冷风通道连通,所述出风口与所述热风通道连通。
[0010]
进一步,所述出风口设有百叶窗。通过百叶窗调节出风口的出风方向,增大烘干除
湿作用范围。
[0011]
进一步,所述进风口设有过滤网。过滤网可过滤空气中的微尘颗粒,避免加热半导体、冷凝铝片或导热铝片上集尘过多。
[0012]
进一步,所述机体外侧沿其周向均匀设有多个与所述微控制器电连接的超声波传感器。
[0013]
进一步,所述机体外侧还设有与所述微控制器电连接的红外传感器。通过超声波传感器和红外传感器的作用,使机器人具备避障防跌落的功能。
[0014]
进一步,所述机体外侧设有与所述微控制器电连接的湿度传感器。通过湿度传感器可检测机器人所处环境湿度,便于实现机器人的自动除湿功能。
[0015]
进一步,所述机器人还包括远程控制装置;所述机体上设有与所述微控制器电连接的通讯单元;所述通讯单元与所述远程控制装置通过无线信号连接。远程控制装置可以是遥控器或其他智能终端,比如手机或平板电脑等。通过远程控制装置与通讯单元建立无线通讯连接,可远程遥控机器人进行除湿干燥作业。
[0016]
本实用新型的有益效果是:通过除湿干燥系统的加热半导体对进风口进入的空气进行加热,并利用风扇将加热后的热空气从出风口吹出,实现室内空气干燥除湿,并利用行走单元实现机体方位的调节,使其可对室内各区域进行流动式干燥除湿作业。另外,通过设置的清扫单元使其具备传统扫地机器人的扫地功能,使机器人在除湿作业的同时可对室内地面进行清扫,提升室内环境处理效率。
附图说明
[0017]
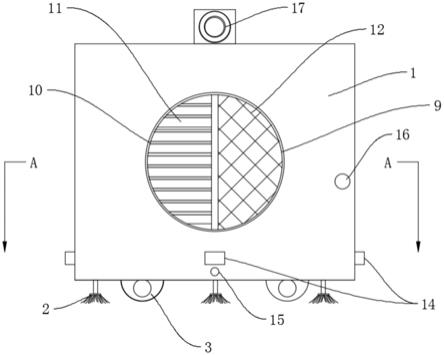
图1为本实用新型基于机器视觉的多维度除湿机器人的主视结构示意图。
[0018]
图2为图1的俯视结构示意图。
[0019]
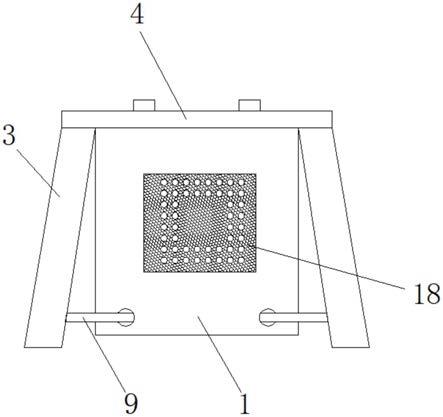
图3为图1的a
‑
a面剖视结构示意图。
[0020]
图中,机体1、清扫单元2、行走单元3、加热半导体4、冷凝铝片5、导热铝片6、风扇7、冷凝水容器8、进风口9、出风口10、百叶窗11、过滤网12、通讯单元13、超声波传感器14、红外传感器15、湿度传感器16、摄像头17、冷风通道18、热风通道19。
具体实施方式
[0021]
以下结合附图和具体实施例对本实用新型作进一步的详细描述。
[0022]
如图1、图2、图3所示的基于机器视觉的多维度除湿机器人,包括机体1及设于机体1内相电连接的中央控制系统、除湿干燥单元、清扫单元2、行走单元3、自动规划系统、避障防跌落系统和远程控制装置。
[0023]
具体的,中央控制系统包括stm32微控制器,其用于除湿干燥单元、清扫单元2、行走单元3、自动规划系统、避障防跌落系统和远程控制装置的控制和信号传输。
[0024]
除湿干燥单元:包括加热半导体4、冷凝铝片5、导热铝片6、风扇7、冷凝水容器8、进风口9和出风口10;机体1内设有相连通的冷风通道18和热风通道19;加热半导体4和风扇7设于冷风通道18和热风通道19之间;加热半导体4位于冷风通道18一侧设有冷凝铝片5;加热半导体4位于热风通道19一侧设有导热铝片6;进风口9和出风口10分别设于机体1侧壁,进风口9与冷风通道18连通,出风口10与热风通道19连通。进一步优化方案:出风口10设有
百叶窗11。所述进风口9设有过滤网12。百叶窗11采用现有角度可调式叶片,从而可调整出风口10出风方向。过滤网12可以是现有常规空气过滤棉或空气过滤芯。当室内空气通过进风口9进入机体1内的冷风通道18,在加热半导体4的作用下,空气升温后形成的高温气流在风扇7的作用下经过热风通道19从出风口10吹出,从而将室内潮湿的地面或墙面烘干。为了更清楚的掌握室内空气湿度情况,机体1外侧还可设有与微控制器电连接的湿度传感器16。通过湿度传感器16检测环境湿度。
[0025]
清扫单元2:包括设于机体1下端的毛刷、驱动毛刷转动的电机、吸尘风机及与吸尘风机连通的储尘仓。电机驱动毛刷转动,并在吸尘风机的作用下将地面的灰尘及垃圾吸入储尘仓内。
[0026]
行走单元3包括设于机体1下端的行走轮;行走轮连接有与微控制器电连接的行走电机。行走电机不仅可作为行走轮的转动驱动件,使机器人可移动,还可作为行走轮的转向驱动件,使机器人可转向。
[0027]
自动规划系统:包括设于机体1上端的摄像头17;利用摄像头17对机器人周边环境先进行一个全景的三维扫描,并在微控制器中建立好与周边环境对应的3d模型,并将该3d模型转换为二维平面图,再根据二维平面图完成机器人的路线规划,优选为机器人采用“弓”字形作业路线,最大限度完成清扫任务。
[0028]
避障防跌落系统:包括设于机体1外侧的超声波传感器14和红外传感器15,其中,超声波传感器14沿机体1外侧周向均匀设置四个。机器人在行走单元3的驱动下行走时,超声波传感器14和红外传感器15实时检测前方障碍物,当检测有障碍物或存在跌落风险时,微控制器控制行走单元3的行走轮的转向。
[0029]
需要说明的是,清扫单元2、行走单元3、自动规划系统、避障防跌落系统均可采用现有技术,本实施例对其具体结构不进行限定。
[0030]
机器人还包括远程控制装置;机体1上设有与微控制器电连接的通讯单元13;通讯单元13与远程控制装置通过无线信号连接。通讯单元13由nrf24l01实现其功能,其工作频段为2.4g频段。
[0031]
远程控制装置可以是手机或平板电脑,用户可通过远程控制装置查看和调整机器人的清扫作业时长或作业面积,干燥除湿作业时长和区域等,实现机器人的智能化控制管理。
[0032]
以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,同样也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。