1.本技术涉及激光测量技术领域,尤其涉及激光雷达及机器人。
背景技术:
2.随着人工智能的发展,智能机器人的应用越来越广泛,例如无人驾驶小车、服务机器人、无人搬运车(automated guided vehicles,agv)、智能路政交通设备等。在这些设备上集成了各种传感器来感知周围环境状况,以便能够根据环境状况及时作出状态调整。例如用于环境探测和地图构建的激光雷达。
3.目前,激光雷达对环境的感知通常有两种方式,第一种方式是通过时间飞行法(time of flight,tof)来进行感知;另一种是通过三角法来进行感知。
4.但是,目前这两种感知方式均存在一定缺陷,无法同时针对远距离物体或者近距离物体进行感知,导致感知的结果不准确,精度较差。
技术实现要素:
5.本技术提供激光雷达及机器人,以解决相关技术中无法同时针对远距离物体或者近距离物体进行感知,导致感知结果不准确,精度较差的技术问题。
6.根据本技术的第一个方面,提供了激光雷达,包括:激光发射器、第一接收器、第二接收器和控制器;
7.所述激光发射器根据所述控制器的控制信号发出激光信号;
8.所述第一接收器接收障碍物反射的激光信号,并生成第一距离信息;所述第二接收器接收所述障碍物反射的激光信号,并生成第二距离信息;
9.所述控制器根据所述第一距离信息和所述第二距离信息,确定所述激光雷达与所述障碍物之间的距离。
10.在一种可能的设计方式中,所述激光发射器的光路轴线与所述第一接收器的光路轴线之间具有第一夹角;所述激光发射器的光路轴线与所述第二接收器的光路轴线之间具有第二夹角,所述第一夹角小于所述第二夹角。
11.在一种可能的设计方式中,所述激光雷达还包括安装支架,所述激光发射器、所述第一接收器和所述第二接收器分别安装在所述安装支架上;所述第一接收器与所述激光发射器之间的间距小于所述第二接收器与所述激光发射器之间的间距。
12.在一种可能的设计方式中,所述第一接收器位于所述激光发射器和所述第二接收器之间。
13.在一种可能的设计方式中,所述激光雷达还包括驱动组件,所述驱动组件与所述安装支架连接,所述驱动组件根据所述控制器的控制信号驱动所述安装支架转动。
14.在一种可能的设计方式中,所述驱动组件包括:电机、主动轮和旋转支架,所述旋转支架与所述安装支架固接,所述主动轮与所述旋转支架传动连接,所述电机的输出轴与所述主动轮连接,所述电机通过所述主动轮和所述旋转支架驱动所述安装支架转动。
15.在一种可能的设计方式中,所述驱动组件包括:电机和旋转支架,所述电机的转子与所述旋转支架连接,且所述电机的转子的轴线与所述旋转支架的旋转轴线同轴,所述电机用于驱动所述旋转支架转动。
16.在一种可能的设计方式中,所述第二接收器的视场角度小于或等于所述第一接收器的视场角度。
17.在一种可能的设计方式中,所述激光雷达还包括壳体,所述壳体具有光通孔,所述激光发射器、所述第一接收器和所述第二接收器分别与所述光通孔对齐。
18.根据本技术的第二个方面,提供了机器人,包括机器人本体和本技术第一个方面任一可能的设计方式提供的激光雷达,所述激光雷达安装在所述机器人本体上。
19.在一种可能的设计方式中,所述激光雷达位于所述机器人本体的顶部、侧壁、底部和/或机器人本体的内部。
20.本技术实施例,激光发射器发出的激光脉冲信号经过障碍物反射后,通过设置第一接收器和第二接收器来分别接收障碍物反射的激光信号,并分别生成第一距离信息和第二距离信息;控制器根据第一距离信息和第二距离信息来确定激光雷达与障碍物之间的距离。这样,在激光雷达距离障碍物较远时,可以利用tof法来确定与障碍物之间的距离;在激光雷达距离障碍物较近时,可以利用三角法来确定与障碍物之间的距离,还可以综合考虑tof和三角法两种方式来确定与障碍物之间的间距,相对于现有技术,能够根据距离障碍物的远近选择合适的感知方式,能够提高对障碍物距离感知的准确性。
21.本技术的构造以及它的其他目的及有益效果将会通过结合附图进行详细说明,以保证对优选实施例的描述更加明显易懂。
附图说明
22.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
23.图1是本技术实施例提供的激光雷达的第一种示例性结构示意图;
24.图2是图1的俯视图;
25.图3是本技术实施例提供的激光雷达的第二种示例性结构示意图;
26.图4是本技术实施例提供的激光雷达的第一种爆炸结构示意图;
27.图5是本技术实施例提供的激光雷达的第二种爆炸结构示意图;
28.图6是本技术实施例提供的激光雷达的第三种示例性结构示意图;
29.图7是图3的俯视图;
30.图8是沿图7中a
‑
a线的剖视图;
31.附图标记说明:
32.10
‑
激光发射器;20
‑
第一接收器;30
‑
第二接收器;40
‑
安装支架;50
‑
驱动组件;60
‑
壳体;70
‑
主控电路板;
33.41
‑
控制电路板;51
‑
电机;52
‑
主动轮;53
‑
旋转支架;54
‑
传动带;55
‑
轴承; 61
‑
光通孔;
34.511
‑
定子;512
‑
转子;
35.α
‑
第一夹角;β
‑
第二夹角。
具体实施方式
36.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.在本技术实施例的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
38.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
39.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.在本技术的描述中,需要理解的是,术语“内”、“外”、“上”、“底”、“前”、“后”等指示的方位或者位置关系(若有的话)为基于附图1所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
41.图1是本技术实施例提供的激光雷达的第一种示例性结构示意图。
42.针对背景技术中提出的技术问题,参照图1所示,根据本技术实施例的第一个方面,提供了激光雷达1,包括:激光发射器10、第一接收器20、第二接收器30和控制器(图中未示出)。
43.具体的,激光雷达1(light laser detection and ranging,li dar)是激光探测及测距系统的简称。其中,激光发射器10可以是各种形式的激光器,例如二氧化碳激光器、掺钕钇铝石榴石激光器、半导体激光器及波长可调谐的固体激光器。
44.可选的,本技术实施例中,激光发射器10可以是垂直腔面发射激光器 (vertical
‑
cavity surface
‑
emitting laser,vcsel)、激光二极管(laser diode, ld)或者发光二极管(light emitting diode,led)激光器等。在激光发射器 10的发射端可以设置有准直镜,从而能够对发出的激光信号进行收敛准直。
45.可以理解的是,本技术实施例中,激光信号可以是脉冲激光信号,也可以是连续激光信号。本技术实施例对此不做限定。
46.lidar测距通常包括两种方法,第一种方法是时间飞行法(time of flight, tof)。即激光器发射一个激光信号,并有计时器记录下发射的时间,激光信号在遇到障碍物后,被障碍物反射,回返光经接收器接收,计时器记录下返回的时间。从而根据两个时间得到光在发出和接收之间所经过的时间长度,通常被称为“飞行时间”。我们知道,光速是一定的,因此在已知速度和时间后,就可以计算得到激光雷达与障碍物之间的距离。
47.第二种方法是利用三角法来进行测量,具体为激光器发射激光,激光照射到障碍物后,反射的光由电荷耦合元件(charge
‑
coupled device,ccd)接收,由于激光器和ccd探测器之间间隔了一段距离,根据光学路径,不同距离的障碍物会成像在ccd探测器的不同位置上。按照三角公式进行计算,就能够得到障碍物与激光雷达之间的距离。
48.可选的,本技术实施例中,第一接收器20和第二接收器30分别可以是互补金属氧化物半导体(complementary metal oxide semiconductor,cmos)、 ccd、雪崩光电二极管(avalanche photo diode,apd)、硅光电倍增管(siliconphotomultiplier,sipm)、单光子雪崩二极管(single photon avalanche diode, spad)等电子器件中的任意一种。
49.可选的,控制器可以是中央处理器(central processing unit,cpu)、微控制单元(microcontroller unit,mcu)、可编程逻辑控制器(programmable logiccontroller,plc)或者现场可编程门阵列(field programmable gate array,fpga) 等中的任意一种。
50.其中,控制器可以产生控制信号,例如在用户的操作下产生控制型号,或者根据预设的逻辑产生控制信号。
51.激光发射器10可根据控制器的控制信号发出连续或脉冲激光信号。激光信号可以入射射到障碍物上,并被障碍物反射。
52.第一接收器20可接收障碍物反射的激光信号,并生成第一距离信息。具体的,第一接收器20在接收到激光信号后,可以按照tof方法计算障碍物与激光雷达1之间的距离,从而得到第一距离信息。
53.第二接收器30可接收障碍物反射的激光信号,并生成第二距离信息。具体的,第二接收器30在接收到激光信号后,可以按照三角法计算障碍物与激光雷达1之间的距离,从而得到第二距离信息。
54.控制器可根据第一距离信息和第二距离信息,确定与障碍物之间的间距。
55.具体的,在第一接收器20和第二接收器30计算出第一距离信息和第二距离信息后,控制器接收到第一距离信息和第二距离信息,并根据这两个距离信息来确定激光雷达1与障碍物之间的距离。例如,在第一距离信息和第二距离信息均在第一预设范围内时,可以将第二距离信息确定为当前激光雷达1与障碍物之间的距离。其中,第一预设范围可以是0
‑
20米,在该范围内,利用三角法测量能够获得更加精确的测量距离,因此,控制器可以将三角法计算得到的第二距离信息作为与障碍物之间的距离。
56.可以理解,在第一距离信息和第二距离信息均在第二预设范围(例如20
‑
300 米)时,此时可以认为激光雷达1与障碍物的间距较远,采用tof法计算的距离更为准确,因此,控制器可以将tof法计算的第一距离信息作为当前激光雷达1与障碍物之间的距离。
57.需要说明的是,在某些情况下,可能会存在第一距离信息在第二预设范围内,而第二距离信息在第一预设范围内的情况。此时,控制器可以综合考虑第一距离信息和第二距离信息来进行对当前间距进行确定。例如,综合第一距离信息和第二距离信息的平均值。或
者,可以分别计算第一距离信息和第二距离信息偏离第一预设范围和第二预设范围的交叉点的偏差值,根据偏差值来确定当前间距。
58.需要说明的是,本技术实施例中,控制器可以是激光雷达1自身携带的控制器。在一些可能的方式中,控制器也可能是机器人上安装的控制器,通过控制接口和通讯总线与激光雷达1通讯连接。
59.本领域技术人员能够理解的是,第一接收器20和第二接收器30因为需要接收被障碍物反射的激光信号,因此,第一接收器20和第二接收器30的接收面和激光发射器10的发射面朝向可以是相同的。即可以是同时朝向障碍物方向。
60.本技术实施例,激光发射器10发出的激光信号经过障碍物反射后,通过设置第一接收器20和第二接收器20来分别接收障碍物反射的激光信号,并分别生成第一距离信息和第二距离信息;控制器根据第一距离信息和第二距离信息来确定激光雷达1与障碍物之间的距离。这样,在激光雷达1距离障碍物较远时,可以利用tof法来确定与障碍物之间的距离;在激光雷达1距离障碍物较近时,可以利用三角法来确定与障碍物之间的距离,还可以综合考虑tof和三角法两种方式来确定与障碍物之间的间距,相对于现有技术,能够根据距离障碍物的远近选择合适的感知方式,能够提高对障碍物距离感知的准确性。
61.可选的,参照图2所示,图2是图1的俯视图。本技术实施例中,激光发射器10的光路轴线(图中虚线箭头示出的轴线)与第一接收器20的光路轴线以及第二接收器30的光路轴线的夹角均小于或等于10度。
62.也就是说,激光发射器10的发射端和第一接收器20或者第二接收器30的接收端是相互靠拢设置的。并且,激光发射器10的轴线延长线与第一接收器20 或者第二接收器30的轴线延长线相交后成型的夹角小于或等于10度。这样,能够保证第一接收器20能够准确接收到障碍物反射的激光信号,并且,计算得到的距离信息更加接近激光雷达1与障碍物之间的真实距离,能够提高激光雷达1测距的准确性。
63.可选的,由于第一接收器20采用tof法计算激光雷达与障碍物之间的间距,而第二接收器30采用三角法计算激光雷达与障碍物之间的间距,根据tof和三角法的测距原理,容易知道第一接收器20与激光发射器10之间的间隔距离可以小于第二接收器30与激光发射器10之间的间隔距离。
64.在具体设置时,可以将激光发射器10设置在第一接收器20和第二接收器 30成三角形排布或者成直线排布在同一平面上。
65.可选的,本技术实施例中,激光发射器10、第一接收器20和第二接收器 30的光路轴线位于同一平面上。
66.这样,能够减小激光发射器10、第一接收器20和第二接收器30需要占用的空间,能够减小激光雷达1的整体体积。
67.进一步的,参照图2所示,激光发射器10的光路轴线与第一接收器20的光路轴线之间具有第一夹角α;激光发射器10的光路轴线与第二接收器30的光路轴线之间具有第二夹角β,第一夹角α小于第二夹角β。
68.具体的,以图2作为示例进行说明,以第一接收器20的光路轴线作为参照,激光发射器10的发射端和第二接收器30的接收端均向第一接收器20的接收端倾斜一定角度。这样,能够保证第二接收器30能够充分接收到障碍物返回的激光信号,同时,能够有效减小第
二接收器30与激光发射器10之间的间距,能够减小激光雷达1的整体体积。
69.可以理解的是,由于第一接收器20采用tof法计算与障碍物之间的间距,而第二接收器30采用三角法计算与障碍物之间的间距。根据tof法和三角法的测距原理,可以知道,第二接收器30的视场角度小于或者等于第一接收器20 的视场角度。这样,第一接收器20由于接收较远的障碍物范围的激光信号,采用较大的视场角度,能够接收到更多的激光信号,提高了第一接收器20能够接收到的激光信号的量。而将第二接收器30的视场角度设置成小于或等于第一接收器20的视场角度,在保证第二接收器30能够接收到足够激光信号的情况下,通过增大第二接收器光学元件的焦距,达到提高测距精度的效果。
70.可选的,继续参照图1和图2所示,本技术实施例中,激光雷达1还包括安装支架40,激光发射器10、第一接收器20和第二接收器30分别安装在安装支架40上。
71.其中,安装支架40可以是硬质的塑胶件,也可以是铝合金或者不锈钢等材料制成的支架。激光发射器10、第一接收器20和第二接收器30可以是通过螺栓、螺钉或者螺杆等连接件连接在安装支架40上。可选的,激光发射器10、第一接收器20和第二接收器30也可以是通过卡接的方式连接在安装支架40上,例如,可以将安装支架40设置成两个具有卡槽的工件,将激光发射器10、第一接收器20和第二接收器30安装在其中一个工件的卡槽内后,再将另一个工件扣合上,通过螺钉、螺栓或者螺杆等进行固定,从而对激光发射器10、第一接收器20和第二接收器30进行固定。
72.这样,能够将激光发射器10、第一接收器20和第二接收器30形成一个整体,能够方便快速的安装的机器人上,提高了安装效率。
73.进一步的,参照图3和图4所示,图3是本技术实施例提供的激光雷达的第二种示例性结构示意图;图4是本技术实施例提供的激光雷达的第一种爆炸结构示意图。本技术实施例中,在安装支架40上还设置有激光发射器10、第一接收器20、第二接收器30的控制电路板41,控制电路板41用于控制激光发射器10发出激光信号,并对第一接收器20和第二接收器30接收到的激光信号进行分析计算。
74.其中,控制电路板41可以是集成电路板或者印制电路板(printed circuitboards,pcb),控制电路板41可以通过螺栓、螺钉或者螺杆等连接件与安装支架40固接。可选的,控制电路板41也可以通过粘接的方式粘贴在安装支架 40上。
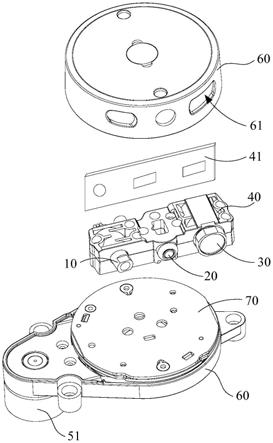
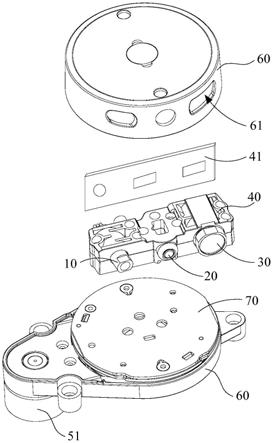
75.具体的,参照图5所示,图5是本技术实施例提供的激光雷达的第二种爆炸结构示意图。激光雷达1还包括驱动组件50,驱动组件50与安装支架40连接,驱动组件50可根据控制器的控制信号驱动安装支架40转动。
76.可以理解,机器人在行走时,通常会从各个方向行走,也就是说,可能会在各个方向上遇到障碍物。为了能够对各个方向上的障碍物进行探测,本技术实施例中,可以通过驱动组件50来驱动安装支架40转动,从而使得安装支架 40上的激光发射器10、第一接收器20和第二接收器30转动,这样就能够对各个方向的障碍物进行探测和感知。能够有效提高机器人在各个方向上的通过性和对障碍物感知的准确性。
77.当然,在一些使用情况下,机器人在静止时,驱动组件50也可以驱动安装支架40转动,从而使得安装支架40上的激光发射器10、第一接收器20和第二接收器30对周围环境进行360
°
的环境感知。
78.具体的,参照图4所示,驱动组件50包括:电机51、主动轮52和旋转支架53。
79.具体的,本技术实施例中,电机51可以是步进电机、同步电机或者伺服电机。电机51根据控制器给定的控制信号转过一定的角度,从而能够精确控制安装支架40的转动速度。
80.在一些可能的方式中,也可以在激光雷达1内设置编码盘,通过编码盘来监测安装支架40的转动速度。
81.具体的,为了便于对电机51的转速进行监测和调节,可在编码盘上设定角度为均匀设置在码盘圆周上的多个测距齿(图中未示出),每转过相邻两个测距齿的边缘所经过的角度相同。综合灵敏度和工作效率两方面因素的考虑,测距齿在码盘圆周上的设置数量可以为5
‑
50个。
82.利用码盘同步扫描测距,首先需要对电机51的转速做一个设定,例如设定 5转/秒,折算出来就是每扫描一度需要555.5μs,理想状态下,每过555.5μs 就能得到旋转一度对应的测量距离,然而由于客观原因,电机的局部转速是不均匀的,可能出现局部过快或过慢的情况,这就导致了实际转过一度耗时不是 555.5μs,例如是277.75μs,快了一倍,那么实际经过555.5μs测出的不是旋转一度对应的距离,而是旋转两度对应的距离,造成最终扫描测量结果不准确。为了解决这个问题,本发明在控制器中设置一个转速反馈调节单元,均匀设置在码盘圆周上的15个测距齿,每相邻两个左边缘间距为24
°
,将码盘分为15 等分。检测每旋转24
°
,即:两个相邻测距齿151的左边缘之间的角度,以其作为一个设定角度,自动计算出在这24
°
对应的局部转速n2并将该转速值传递给控制器,控制器内设置一转速阈值n0范围,如果该局部转速n2的数值不在该转速阈值n0范围(对应5转/秒,设为290转
‑
310转/分)内,则控制器不保留该设定角度内所测的距离值,即:视为未测量,并通过控制调整电路电压将电机51的转速重新设为最初的设定的初始转速nl,比如5转/秒,重新测量上述设定角度内各角度对应的距离值。
83.这里需要说明的是,本技术涉及的数值和数值范围为近似值,受制造工艺的影响,可能会存在一定范围的误差,这部分误差本领域技术人员可以认为忽略不计。而对于数值参数同样仅作为示例性说明,而并非对数值的具体值进行限定。
84.在另一种具体示例中,编码盘包括:发射元器件、接收元器件和反射件。在反射件的一侧设有呈规律变化的锯齿状反射区,以及用于标定位置的定位区,定位区用于作参考点,方便位置计算;反射区呈规律变化(这里可以是锯齿的斜面、平面、弧面或者棱锥面;也可以是间隔设置的黑面与白面、光滑面与粗糙面,从而根据反射率的不同,形成反射码),用于方便计算安装支架40的具体转速,以及确定激光发射器10、第一接收器20和第二接收器30与定位区之间的角度,从而方便确定障碍物的具体位置。
85.本技术实施例中,主动轮52可以连接在电机51的输出轴上,例如通过减速器或者联轴器连接在电机51的输出轴上。并可在电机51的输出轴的带动下转动。其中,旋转支架53可以是与安装支架40固接,例如通过螺栓、螺杆或者螺钉等连接件进行固定。
86.主动轮52和旋转支架53传动连接。具体的,主动轮52和旋转支架53可以相互啮合,从而实现主动轮52与旋转支架53的传动。
87.在一些可能的方式中,驱动组件50还包括:传动带54,主动轮52和旋转支架53也可以通过传动带54传动连接。在具体实现时,可以在主动轮52的侧壁设置限位槽,同样的,在旋转支架53的侧壁也设置限位槽,并将传动带54 嵌入主动轮52和旋转支架53中的限位槽
内,然后将传动带54绷直或者绷紧,利用传动带54与主动轮52和旋转支架53之间的摩擦力来实现传动。
88.在一种可能的示例中,参照图6所示,图6是本技术实施例提供的激光雷达的第三种示例性结构示意图。驱动组件50可以包括电机51和旋转支架53,电机51包括定子511和转子512,转子512与旋转支架53连接。在具体实现时,可以将电机51设置在旋转支架53的下方,旋转支架53通过螺栓、螺杆或者螺钉等于电机51的转子512连接。当然,旋转支架53也可以是通过啮合的方式与电机51的转子512连接。并且,电机51的转子512的轴线与旋转支架53的旋转轴线同轴。
89.在具体设置时,电机51可以设置在旋转支架53的下方,而安装支架40可以设置在旋转支架53的上方。当然,也可以将电机51设置在旋转支架53的上方,而安装支架40设置在旋转支架53的下方。
90.在具体使用时,本技术实施例提供的激光雷达1可以作为一个整体安装在机器人上,例如安装在机器人的顶部、侧壁或者底部等位置,从而对机器人周围的环境进行感知。
91.可以理解的是,本技术实施例中,也可以是将安装支架40以及设置在安装支架上的激光发射器10、第一接收器20和第二接收器30安装在机器人上,即安装支架40可以用来与机器人(例如无人驾驶小车、服务机器人、agv小车或者智能路政交通设备等)连接,从而将激光发射器10、第一接收器20和第二接收器30安装在机器人上。具体可以在机器人上多安装几个激光雷达1即可实现对机器人周围360
°
的环境进行感知。
92.可选的,电机51也可以固定在机器人上,而旋转支架53可以通过轴承55 与机器人转动连接。这样,能够减小旋转支架53与机器人之间的摩擦力,能够节省能耗。
93.可选的,本技术实施例中,激光雷达1还可以包括主控电路板70,主控电路板70可以设置在安装支架40上。控制器可以设置在主控电路板70上。可以理解,主控电路板70可以是集成电路板或者印制电路板(printed circuit boards, pcb),主控电路板70可以通过螺栓、螺钉或者螺杆等连接件与安装支架40 固接。
94.可以理解,为了对激光发射器10、第一接收器20、第二接收器30以及驱动组件50等部件进行有效保护,延长激光雷达1的使用寿命。参照图5、图7 和图8所示,图7是图3的俯视图,图8是沿图3中a
‑
a线的剖视图。本技术实施例中,激光雷达1还包括壳体60,安装支架40和驱动组件50分别安装在壳体60内。
95.具体的,壳体60可以是硬质塑胶、铝合金或者不锈钢等材料制成。电机51 可以安装在壳体60上。
96.进一步的,参照图5和图8所示,壳体60具有光通孔61,激光发射器10、第一接收器20和第二接收器30分别与光通孔61对齐。
97.具体的,以图3和图5作为示例进行说明。光通孔61的数量可以是三个,激光发射器10、第一接收器20和第二接收器30可分别对应一个光通孔61,并且激光发射器10、第一接收器20和第二接收器30的光轴线分别与对应的光通孔的轴线共线,从而保证激光发射器10发出的激光信号能够从光通孔61透出,而第一接收器20和第二接收器30能够接收到障碍物返回的激光信号。
98.需要说明的是,由于激光发射器10、第一接收器20和第二接收器30在驱动组件50的驱动下转动。为保证激光发射器10发出的激光信号能够透出壳体 60,以及第一接收器20
和第二接收器30能够接收到障碍物返回的激光信号,本技术实施例中,壳体60可以包括固定部分和转动部分,固定部分被配置为与机器人固接,光通孔61设置在转动部分,转动部分被配置为与旋转支架53固接,并在旋转支架53的带动下转动。
99.从前面的描述,可以理解,由于电机51可以通过主动轮52与旋转支架53 啮合或者通过传动带54与旋转支架53传动连接;因此,电机51可以通过旋转支架53带动激光发射器10、第一接收器20、第二接收器30、安装支架40以及壳体60的转动部分一起转动。当然,参照图6所示,在电机51的转子512的轴线与旋转支架53的旋转轴线同轴时,电机51的转子512也可以带动激光发射器10、第一接收器20、第二接收器30、安装支架40以及壳体60的转动部分同轴转动。其中,电极51的定子511可以与壳体60的固定部分固接,例如通过螺栓、螺钉或者螺杆等进行连接。
100.需要说明的是,图6中示出的电机51的转子512与旋转支架53同轴转动,并带动激光发射器10、第一接收器20、第二接收器30、安装支架40以及壳体 60的转动部分同轴转动仅作为一种示例性说明。本领域技术人员容易想到电机 51还可以通过其他方式来带动旋转支架53转动。
101.具体的,固定部分的周壁上可以一体成型有固定螺孔,固定部分可以通过固定螺孔与机器人固定连接。
102.在具体实现时,转动部分与固定部分之间可以留有一定间隙。
103.这样,转动部分可以和旋转支架53一起转动,从而能够更好的对激光发射器10、第一接收器20和第二接收器30进行保护。并且,由于转动部分和安装支架40一起转动,这样,激光发射器10、第一接收器20和第二接收器30能够通过同一个通孔发射或者接收激光信号,能够保证接收激光信号的准确性。
104.在一些可能的示例中,也可以将壳体60设置成透明壳体,例如采用透明亚克力板、透明塑料板或者钢化玻璃等作为壳体60,这样,壳体60可以固定,而不用随旋转支架53一起转动,从而能够降低电机51的功率消耗。同时,将壳体60设置成透明壳体,在壳体60上也不再需要设置光通孔61,这样,能够保证壳体60的完整性,从而能够更好的对激光发射器10、第一接收器20和第二接收器30进行保护。
105.根据本技术实施例的第二个方面,提供了机器人,包括机器人本体和本技术实施例的第一个方面任一可选实施方式提供的激光雷达1。
106.具体的,激光雷达1可以安装在机器人本体的顶部、侧壁、底部或者机器人的内部。
107.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。