1.本技术涉及办公家具技术领域,尤其涉及一种智能工作平台。
背景技术:
2.人们在工作、学习或者生活中,都需要使用桌子或者平台作为支撑,以提高效率和舒适性。为节省成本,在进行批量生产时,通常都是按统一的高度标准制作。然而现实中,因为每个人的身高和习惯差异,所以能适应桌子或者台面的高度也不同。
3.目前市面上提供了一种桌子,可通过按键来调控桌子的升降,人们可根据自身的需要调节桌子的高度。但是对于不同的用户使用时,都要根据需要人为调整高度,并且,针对同一用户使用时,每次调节的桌子高度也很难控制一致,且操作繁琐,智能化程度低。
技术实现要素:
4.为克服现有技术中的不足,本技术提供了一种智能工作平台,用以解决现有技术中桌子升降调节操作繁琐,智能化程度低的问题。
5.为达上述目的,第一方面,本技术提供的一种智能工作平台,包括支撑面板、升降支撑装置、拍摄装置、人机交互装置及控制装置;
6.所述升降支撑装置包括伸缩支腿及升降执行机构,所述伸缩支腿支撑于所述支撑面板的下方,所述升降执行机构设置于所述伸缩支腿,所述升降执行机构用于驱动所述伸缩支腿执行伸缩运动,以带动所述支撑面板升降;
7.所述拍摄装置和所述人机交互装置均设置于所述支撑面板,所述拍摄装置用于对人体进行拍摄以得到人体信息,所述人机交互装置用于显示和键入交互信息;
8.所述控制装置分别与所述拍摄装置、所述人机交互装置以及所述升降执行机构连接,所述控制装置用于获取用户的身份信息,确认当前用户的状态,并根据所述身份信息及所述用户的状态控制所述升降执行机构动作;
9.其中,所述身份信息包括拍摄的人体信息和键入的所述交互信息,所述用户的状态包括站立状态和端坐状态。
10.结合第一方面,在一种可能的实施方式中,所述智能工作平台还包括灯光装置,所述灯光装置包括传感器及灯带;
11.所述传感器连接所述控制装置,所述传感器用于感应外界环境信息的变化;
12.所述灯带设置于所述支撑面板及连接于所述控制装置,所述控制装置用于获取所述外界环境信息,以控制所述灯带实现灯光色彩和/或亮度变换。
13.结合第一方面,在一种可能的实施方式中,所述智能工作平台包括两个所述伸缩支腿,两个所述伸缩支腿之间设置有支撑横梁,所述支撑横梁连接所述支撑面板。
14.结合第一方面,在一种可能的实施方式中,所述伸缩支腿包括第一支撑柱腿及第二支撑柱腿,所述第一支撑柱腿沿轴向形成有第一导向腔,所述第二支撑柱腿沿轴向形成有第二导向腔,所述第二支撑柱腿插设于所述第一导向腔内,所述升降执行机构用于驱动
所述第二支撑柱腿相对所述第一支撑柱腿滑动,其中所述第二支撑柱腿远离所述第一支撑柱腿的一端设置于所述支撑面板。
15.结合第一方面,在一种可能的实施方式中,所述第二支撑柱腿的外侧壁与第一导向腔的内侧壁相适配。
16.结合第一方面,在一种可能的实施方式中,所述伸缩支腿还包括支撑底座及可调支撑脚垫,所述支撑底座设置于所述第一支撑柱腿远离所述支撑面板的一端,所述可调支撑脚垫设置于所述支撑底座上。
17.结合第一方面,在一种可能的实施方式中,所述升降执行机构包括升降丝杠组件、驱动电机及传动组件,所述升降丝杠组件设置于所述伸缩支腿内,所述驱动电机设置于所述支撑面板下表面,所述驱动电机通过所述传动组件与所述升降丝杠组件连接,所述升降丝杠组件用于驱动所述伸缩支腿伸缩。
18.结合第一方面,在一种可能的实施方式中,所述传动组件包括传动轴及锥齿轮传动结构,所述锥齿轮传动结构设置于所述伸缩支腿内,所述驱动电机通过所述传动轴连接所述锥齿轮传动结构。
19.结合第一方面,在一种可能的实施方式中,所述升降执行机构包括电动推杆,所述电动推杆设置于所述伸缩支腿内。
20.结合第一方面,在一种可能的实施方式中,所述智能工作平台还包括拓展端口,所述拓展端口设置于所述支撑面板及连接于所述控制装置,所述拓展端口用于接入外部设备。
21.相比现有技术,本技术的有益效果:
22.本技术提供的一种智能工作平台,智能工作平台包括支撑面板、升降支撑装置、拍摄装置、人机交互装置及控制装置;升降支撑装置包括伸缩支腿及升降执行机构,伸缩支腿支撑于支撑面板的下方,升降执行机构设置于伸缩支腿,升降执行机构用于驱动伸缩支腿执行伸缩运动,以带动支撑面板升降;拍摄装置和人机交互装置均设置于支撑面板,拍摄装置用于对人体进行拍摄以得到人体信息,人机交互装置用于显示和键入交互信息;控制装置分别与拍摄装置、人机交互装置以及升降执行机构连接,控制装置用于获取用户的身份信息,身份信息包括拍摄的人体信息和键入的交互信息,以控制升降执行机构动作。本技术提供的智能工作平台,通过拍摄装置和控制装置的配合,确认用户当前状态是站立状态还是端坐状态,控制装置根据用户当前状态,最终控制升降执行机构驱动伸缩支腿执行伸缩运动,以带动支撑面板准确地升降至目标高度,满足用户当前的使用需求。本技术提供的智能工作平台操作便捷,智能化程度高。
附图说明
23.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
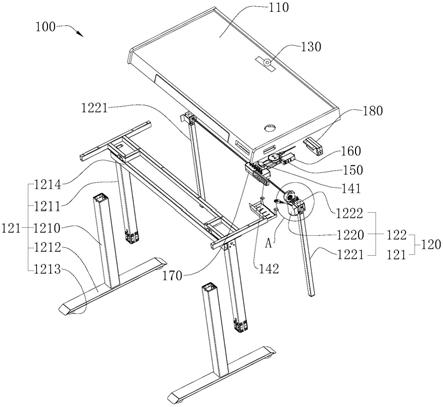
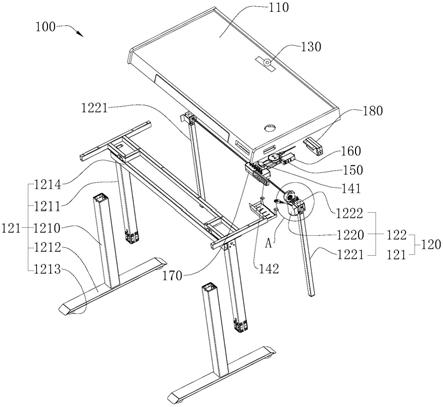
24.图1示出了本技术实施例提供了第一种智能工作平台的立体结构示意图;
25.图2示出了本技术实施例提供了第二种智能工作平台的立体结构示意图;
26.图3示出了图2所示智能工作平台的分解示意图;
27.图4示出了图3中a处的局部放大示意图;
28.图5示出了智能工作平台中升降执行机构部分结构的分解示意图;
29.图6示出了智能工作平台中控制装置与各功能模块连接的模块示意图;
30.图7示出了本技术实施例提供的智能工作平台的第一种使用场景示意图;
31.图8本技术实施例提供的智能工作平台的第二种使用场景示意图;
32.图9本技术实施例提供的智能工作平台的第三种使用场景示意图。
33.主要元件符号说明:
34.100
‑
智能工作平台;110
‑
支撑面板;120
‑
升降支撑装置;121
‑
伸缩支腿;1210
‑
第一支撑柱腿;1211
‑
第二支撑柱腿;1212
‑
支撑底座;1213
‑
可调支撑脚垫;1214
‑
支撑横梁;122
‑
升降执行机构;1220
‑
驱动电机;1221
‑
升降丝杠组件;1221a
‑
丝杠;1221b
‑
螺母;1221c
‑
支撑套;1222
‑
传动组件;1222a
‑
传动轴;1222b
‑
锥齿轮传动结构;130
‑
拍摄装置;131
‑
动作传感器;132
‑
摄像头;140
‑
人机交互装置;141
‑
显示屏;142
‑
功能按键;150
‑
无线充电装置;160
‑
拓展端口;170
‑
控制装置;171
‑
身份识别装置;172
‑
无线通讯装置;173
‑
声控装置;180
‑
安全电源;190
‑
灯光装置;191
‑
传感器;192
‑
灯带。
具体实施方式
35.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
36.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
37.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
39.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.实施例一
41.请参阅图1至图8,本实施例提供了一种智能工作平台100,可应用于办公家具领域或工业生产领域。
42.其中,办公家具领域可具体应用到一种餐桌、办公桌、书桌、茶几桌、案板桌等。工业生产领域可具体应用到加工台、置物台等。
43.请结合参阅图1、图2以及图3,本实施例提供的智能工作平台100,包括支撑面板110、升降支撑装置120、拍摄装置130、人机交互装置140及控制装置170。其中,升降支撑装置120设置于支撑面板110的下方,升降支撑装置120的作用是为支撑面板110提供稳定的支撑,同时可以带动支撑面板110的升降,进而可调整支撑面板110距离地面的高度。
44.拍摄装置130和人机交互装置140均设置于支撑面板110上。可选地,拍摄装置130和人机交互装置140均设置于支撑面板110的上表面,升降支撑装置120位于支撑面板110的下表面。其中,拍摄装置130可对人体进行拍摄,以得到人体信息。具体的,当用户面向拍摄装置130时,拍摄装置130对用户进行拍摄,其中拍摄的人体信息包括用户的人脸信息和人体视频图像,人机交互装置140用于显示和/或键入交互信息,以实现人机交互功能。
45.在一些实施例中,如图1所示,人机交互装置140也可设置在支撑面板110的侧壁上。
46.请结合参阅图2和图6,拍摄装置130包括动作传感器131及摄像头132,动作传感器131和摄像头132均设置于支撑面板110,且动作传感器131和摄像头132均与控制装置170连接,摄像头132可内置或外置于支撑面板110,摄像头132用于对人体进行拍摄。动作传感器131用于感应人体是否动作,当动作传感器131感应到用户站立或坐下动作时,进而发送信号给控制装置170,控制装置170控制摄像头132开启,以进入拍摄状态。
47.请结合参阅图2和图6,人机交互装置140包括与控制装置170连接的显示屏141和功能按键142,显示屏141和功能按键142均设置于支撑面板110的表面,显示屏141用于显示交互信息,功能按键142用于键入交互信息。
48.在一些实施例中,显示屏141选用可触控的显示屏141,显示屏141内置有虚拟按键,以代替功能按键142。
49.其中,显示屏141显示的交互信息包括时间信息、温度信息、支撑面板110的高度信息以及用户的身份信息等。功能按键142键入交互信息包括用户的身份信息、支撑面板110的高度信息、时间信息等。
50.应当理解的上述仅是举例说明,不作为本技术保护范围的限制。
51.在一些实施例中,显示屏141内嵌在支撑面板110内,与支撑面板110形成一个整体。
52.在另一些实施例中,显示屏141与支撑面板110为可拆卸配合,方便用户取下显示屏141操作,使用便捷舒适。
53.请结合参阅图2、图3、图4以及图5,上述升降支撑装置120,包括伸缩支腿121及升降执行机构122,伸缩支腿121支撑于支撑面板110的下方,升降执行机构122设置于伸缩支腿121。升降执行机构122可驱动伸缩支腿121执行伸缩运动,以带动支撑面板110升降。
54.在本实施例中,伸缩支腿121的数量设置有两个,两个伸缩支腿121分别沿支撑面板110的长度方向分布,即两个伸缩支腿121分别位于支撑面板110沿长度方向的两端,两个
伸缩支腿121的结构上具有对称性。
55.当然在一些实施例中,伸缩支腿121的数量也可以设置为一个、三个、四个或其它数量,在本实施例中仅是举例说明,不作为本技术保护范围的限制。
56.由此,为了更清楚的描述本技术的技术方案,下文对两个伸缩支腿121择一进行描述:
57.进一步的,请结合参阅图3,伸缩支腿121包括第一支撑柱腿1210、第二支撑柱腿1211、支撑底座1212、可调支撑脚垫1213及支撑横梁1214,其中,第一支撑柱腿1210和第二支撑柱腿1211均为中空结构,即第一支撑柱腿1210沿轴向形成有第一导向腔,第二支撑柱腿1211沿轴向形成有第二导向腔。第二支撑柱腿1211插设于第一支撑柱腿1210的第一导向腔内,第二支撑柱腿1211的外侧壁与第一导向腔的内侧壁相适配,进而第二导向腔与第一导向腔连通,且第二支撑柱腿1211可相对第一支撑柱腿1210的第一导向腔滑动。第二支撑柱腿1211远离第一支撑柱腿1210的一端通过支撑横梁1214与支撑面板110的下表面连接。第一支撑柱腿1210远离支撑面板110的一端设置有支撑底座1212,第一支撑柱腿1210通过支撑底座1212与地面接触。
58.可选地,如图1和图2所示,第一支撑柱腿1210和第二支撑柱腿1211均呈圆柱形或棱柱形。
59.请结合参阅图2和图3,其中,支撑底座1212的两端沿支撑面板110的宽度方向设置。进一步的,支撑底座1212的底部设置有两个可调支撑脚垫1213,两个可调支撑脚垫1213位于支撑底座1212的两端,且可调支撑脚垫1213与支撑底座1212为螺纹配合。通过旋转可调支撑脚垫1213使之与地面接触,进而可调节伸缩支腿121支撑的稳定性以及支撑面板110的水平度。
60.请结合参阅图2、图4以及图5,进一步的,升降执行机构122包括驱动电机1220、传动组件1222及两组升降丝杠组件1221,其中两个伸缩支腿121内均设置有一组升降丝杠组件1221。在本实施例中,升降丝杠组件1221位于第一导向腔和第二导向腔内,其中,升降丝杠组件1221包括丝杠1221a、螺母1221b及支撑套1221c,其中螺母1221b安装在支撑套1221c的一端,支撑套1221c的另一端与第一支撑柱腿1210底部连接,为螺母1221b提供支撑。丝杠1221a与螺母1221b为螺纹副配合。
61.传动组件1222包括传动轴1222a及设置于传动轴1222a两端的锥齿轮传动结构1222b,驱动电机1220安装于支撑面板110的下表面,驱动电机1220的输出端与传动轴1222a配合,驱动电机1220驱动传动轴1222a正反转。锥齿轮传动结构1222b固定安装于第二支撑柱腿1211的第二导向腔内,锥齿轮传动结构1222b的输入端连接传动轴1222a,锥齿轮传动结构1222b的输出端连接丝杠1221a。锥齿轮传动结构1222b将传动轴1222a的旋转运动传递给丝杠1221a,进而带动丝杠1221a转动,进一步通过丝杠1221a与螺母1221b的配合,使得第二支撑柱腿1211相对第一支撑柱腿1210伸缩。其中,第一导向腔沿竖直方向设置,因此,第二支撑柱腿1211的伸缩运动为竖直方向,进而可带动支撑面板110沿竖直方向升降。
62.进一步的,锥齿轮传动结构1222b包括外壳及设置在外壳中的两个相互啮合的锥齿轮。其中,外壳固定安装于第二支撑柱腿1211的第二导向腔内,两个锥齿轮的中轴线相互垂直。其中一个锥齿轮与传动轴1222a连接,另一个锥齿轮与丝杠1221a连接,进而将驱动电机输出的旋转运动转换成丝杠1221a的转动。
63.可以理解的,由于丝杠1221a与螺母1221b为螺纹副配合,螺纹副本身具有自锁的特性,所以在支撑面板110升降至目标高度时,控制驱动电机1220停止,即可使得支撑面板110稳定保持在目标高度。当然在一些实施例中,可以增加锁止机构对支撑面板110进行锁紧固定,如电动推杆带动插销插入进行锁止。
64.可选地,丝杠1221a选用梯形丝杠1221a,其自锁性能更好。
65.在一些实施例中,升降执行机构122包括两个驱动电机1220及两组升降丝杠组件1221,其中,升降丝杠组件1221的设置如上所述不变,对应的每个升降丝杠组件1221配置一个驱动电机1220,驱动电机1220的输出端可直接与升降丝杠组件1221中的丝杠1221a配合。升降控制时,两个驱动电机1220同步动作,进而可直接驱动两个伸缩支腿121中的丝杠1221a同步转动,实现支撑面板110的升降。
66.在另一些实施例中,升降执行机构122包括两个电动推杆(图未示),两个电动推杆分别设置于两个伸缩支腿121内。其中,电动推杆的伸缩杆连接第一支撑柱腿1210,电动推杆远离伸缩杆的一端连接第二支撑柱腿1211,进而通过控制两个电动推杆同步伸缩,即可驱动第二支撑柱腿1211相对第一支撑柱腿1210运动,实现支撑面板110的升降。
67.如图6所示,上述控制装置170分别与拍摄装置130、人机交互装置140以及升降执行机构122中的驱动电机1220连接。
68.控制装置170用于获取用户的身份信息,其中,用户的身份信息包括拍摄的人体信息和键入的交互信息,控制装置170再根据身份信息控制升降执行机构122动作。
69.可选地,控制装置170包括设置有控制芯片的集成电路板或者单片机或者plc控制器。
70.请结合参阅图3,进一步的,智能工作平台100还包括安全电源180,安全电源180嵌装在支撑面板110内,安全电源180用于给控制装置170、拍摄装置130、人机交互装置140、升降执行机构122中的驱动电机1220或电动推杆供电,安全电源180通过导线连接有插头。
71.请结合参阅图6、图7、图8以及图9,本实施例提供的一种智能工作平台100的工作原理是:
72.使用前准备工作:
73.进行数据录入,其中数据录入的方式有两种:
74.第一种方式是通过收集不同身高的用户在站立状态下使用的支撑面板110的第一高度数据和端坐状态下使用的支撑面板110的第二高度数据,再将这些第一、第二高度数据导入到控制装置170中的存储模块中进行储存;
75.第二种方式是用户自己通过功能按键142输入自己的身高,以及自己在站立状态下使用的支撑面板110的第一高度数据和端坐状态下使用的支撑面板110的第二高度数据,并将输入的第一、第二高度数据发送至控制装置170的存储模块中进行储存。
76.进一步的,摄像头132通过拍摄还可选择采集用户的人脸信息,发送至控制装置170的存储模块中进行储存,方便后续使用时进行身份识别,控制装置170再从存储模块中获取第一、第二高度数据。
77.使用时:
78.首先,用户靠近摄像头132,控制装置170获取用户的身份信息,所述身份信息包括拍摄的人体信息和键入的交互信息。
79.具体的,当用户靠近摄像头132时,动作传感器131感应到用户的靠近,控制装置170控制摄像头132启动,摄像头132对用户进行拍摄,对用户的人脸进行识别。控制装置170通过人脸信息确定用户的身份,再从存储模块获取用户的身份信息。其中,获取的身份信息包括身高及使用前录入的第一、第二高度数据,并且控制装置170获取的身份信息可以在显示屏141中进行显示。
80.接着,控制装置170确认当前用户的状态,所述用户的状态包括站立状态和端坐状态。
81.具体的,当用户在站立状态和端坐状态之间切换时,动作传感器131会感应到用户的动作,摄像头132启动对用户进行拍摄以得到人体信息,进而采集到人体视频图像,控制装置170获取采集的人体视频图像,通过内部程序软件系统进行计算分析,得到人体动作识别结果,其中识别结果包括用户是站立状态或端坐状态。
82.最后,控制装置170根据身份信息及用户的状态,控制升降执行机构122动作。
83.具体的,如图9所示,若用户初始状态是站立状态,此时支撑面板110上升至设定的第一高度位置。
84.如图7所示,当用户坐下,此时控制装置170确定用户是端坐状态,控制装置170控制升降执行机构122中的驱动电机1220转动,进而带动支撑面板110下降至设定的第二高度位置。
85.进一步的,依次如图7、图8以及图9所示,当用户从端坐状态转为站立时,此时控制装置170确定用户是站立状态,控制装置170控制升降执行机构122中的驱动电机1220反向转动,进而带动支撑面板110上升至设定的第一高度位置。
86.由此,通过控制支撑面板110上升和下降以适配当前用户的状态,缓解用户作业的疲劳,提升工作效率,进一步提升用户使用体验,更智能更人性化。
87.在一些实施例中,用户在站立和端坐状态之间切换间隔3
‑
10秒后,控制装置170再控制升降执行机构122中的驱动电机1220转动,避免驱动电机1220转动方向突然切换,实现对驱动电机1220进行保护,延长使用寿命。
88.其中,如果用户在使用时对支撑面板110当前的高度不满意时,还可通过功能按键142进行微调,以使得支撑面板110达到最佳使用高度位置,使用更人性化。
89.进一步的,控制装置170还具备自学习功能,可将不同用户的使用数据进行存储后,后续可根据新的用户的身高推荐支撑面板110的第一、第二高度数据。
90.在一些实施例中,摄像头132可适配用户的手势动作,例如当用户的手掌朝向摄像头132时,控制装置170通过升降执行机构122控制支撑面板110上升;当用户是以拳头朝向摄像头132时,控制装置170通过升降执行机构122控制支撑面板110下降。应当理解的,上述仅是举例说明,不作为本技术保护范围的限制。
91.本实施例提供的智能工作平台100,根据用户当前是站立状态或端坐状态,进而控制升降执行机构122驱动伸缩支腿121执行伸缩运动,以带动支撑面板110准确地升降至的目标高度,以满足用户的使用需求,操作便捷,智能化程度高。
92.实施例二
93.请参阅图2、图3以及图6,本实施例提供了一种智能工作平台100,可应用于办公家具领域或工业生产领域。本实施例是在上述实施例一的技术基础上做出的改进,相比上述
实施例一,区别之处在于:
94.请结合参阅图3和图6,在本实施例中,智能工作平台100还包括灯光装置190,其中,灯光装置190包括传感器191及灯带192;传感器191设置于支撑面板110,传感器191连接控制装置170,传感器191用于感应外界环境信息的变化。灯带192沿支撑面板110的侧边环绕设置,灯带192的灯光支持多种色彩和/或亮度的变换。在本实施例中,灯带192的灯光同时支持多种色彩和亮度的变换。可选地,灯带192为led灯带192。
95.进一步的,灯带192连接控制装置170,控制装置170用于获取传感器191检测的外界环境信息,以控制灯带192进行颜色或亮度变换。
96.进一步的,传感器191包括湿度传感器、温度传感器、声音传感器、光线传感器中的一种或两种及以上的组合。应当理解的,上述仅是举例说明,不作为本技术保护范围的限制。
97.具体的,湿度传感器可检测环境中空气湿度信息,并将该空气湿度信息反馈至控制装置170,控制装置170根据空气的干湿润程度控制灯带192切换至不同的色彩或不同亮度的灯光,以提升氛围。
98.温度传感器可检测环境中的温度信息,并将该温度信息反馈至控制装置170,控制装置170根据温度高低控制灯带192切换至不同的色彩或不同亮度的灯光,以提升氛围。
99.声音传感器可检测环境中的音乐信息,即控制装置170可根据音乐的背景、音量、音乐节奏控制灯带192切换至不同的色彩或不同亮度的灯光,以提升氛围。
100.光线传感器可检测环境中的暗亮信息,并将该暗亮信息反馈至控制装置170,控制装置170根据暗亮程度控制灯带192切换至不同的色彩或不同亮度的灯光,以提升氛围。
101.在一些实施例中,可在控制装置170中内置时间芯片,进而控制装置170可根据时间或季度的变化控制灯带192切换至不同的色彩或不同亮度的灯光,以提升氛围。
102.上述,具体灯带192发射的灯光色彩可根据用户的个人喜好设定,在本实施例中不做具体限定。灯光的亮度变化类似呼吸灯的原理。
103.实施例三
104.请参阅图2、图3以及图6,本实施例提供了一种智能工作平台100,可应用于办公家具领域或工业生产领域。本实施例是在上述实施例一或实施例二的技术基础上做出的改进,相比上述实施例一或实施例二,区别之处在于:
105.在本实施例中,智能工作平台100包括声控装置173,声控装置173设置于支撑面板110,声控装置173与连接控制装置170,声控装置173用于获取声音控制指令。
106.其中,用户可通过语音控制支撑面板110的升降或灯带192灯光的切换。
107.在一些实施例中,智能工作平台100还包括身份识别装置171,身份识别装置171设置于支撑面板110,身份识别装置171与控制装置170连接,身份识别装置171用于获取用户身份信息。
108.可选地,身份识别装置171包括指纹识别器和id读卡器。在一些实施例中身份识别装置171包括指纹识别器或id读卡器。其中指纹识别器、id读卡器均可读取用户的身份信息,进而可获取用户的身高及使用前设定第一、第二高度数据。
109.由此,用户可选择摄像头132的人脸识别、指纹识别器的指纹识别或者id读卡器的读卡识别中的任意一种方式进行身份的识别。
110.在一些实施例中,智能工作平台100还包括无线通讯装置172,无线通讯装置172设置于支撑面板110,无线通讯装置172连接控制装置170,无线通讯装置172用于与外部设备建立无线通讯连接。
111.其中,无线通讯连接包括蓝牙、wifi、3g、4g或5g连接等,上述仅是举例说明,不作为本技术保护范围的限制。
112.可选地,外部设备可以是移动终端,移动终端包括有手机、平板电脑、笔记本电脑或者智能手表,上述仅是举例说明,不作为本技术保护范围的限制。
113.当移动终端与无线通讯装置172建立无线通讯连接后,可在移动终端上操控升降执行机构122动作。
114.在一些实施例中,支撑面板110上设置有二维码,用户可通过手机app(application)应用程序扫描该二维码登陆,以与无线通讯装置172建立无线通讯连接,进而也可完成用户身份的识别。
115.进一步的,可在支撑面板110上设置无线充电装置150为手机充电。
116.在一些实施例中,智能工作平台100还包括拓展端口160,拓展端口160设置于支撑面板110的侧边,拓展端口160连接控制装置170,拓展端口160可接入外部设备。其中,在此外部设备包括智能家具,例如房间的灯、空调、空气净化器或者智能窗帘灯。
117.进一步的,拓展端口160上设置有usb接口,可通过数据线连接手机或平板电脑。
118.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
119.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。