1.本实用新型涉及一种能垂直升降、悬停、向前飞行、向后飞行,向侧面飞行的全倾转多螺旋桨直升飞机。
背景技术:
2.目前公知的能实现垂直升降、悬停、前后左右飞行的成功方法有多螺旋桨直升机,如四螺旋桨直升机,具有结构简单,可靠性高的优点,单由于前飞时,螺旋桨的旋转面与水平面的夹角较小,向前水平飞行的速度较慢。
技术实现要素:
3.为了提高水平飞行速度,提高飞行效率,本实用新型提供全倾转多螺旋桨直升飞机,实现这一目标。
4.本实用新型解决其技术问题所采用的技术方案是:采用上单翼固定翼飞机为主体,上单翼固定翼飞机的尾部设置水平尾翼和垂直尾,上单翼固定翼飞机的固定翼上设置左右襟翼,上单翼固定翼飞机重心附近设置起落架,在上单翼固定翼飞机的左边固定翼下设置纵向的左支撑纵梁,在左支撑纵梁的前端设置左前水平铰,在左前水平铰上设置左前拉力螺旋桨,左前拉力螺旋桨的旋转面水平设置,设置倾转机构使左前拉力螺旋桨可绕左前水平铰向前倾转,使旋转面水平的左前拉力螺旋桨向前倾转90
°
变为旋转面垂直的左前拉力螺旋桨,或使旋转面垂直的左前拉力螺旋桨回转90
°
变为旋转面水平的左前拉力螺旋桨,在左支撑纵梁的后端设置左后水平铰,在左后水平铰上设置左后推力螺旋桨,左后推力螺旋桨的旋转面水平设置,设置倾转机构使左后推力螺旋桨可绕左后水平铰向后倾转,使旋转面水平的左后推力螺旋桨向后倾转90
°
变为旋转面垂直的左后推力螺旋桨,或使旋转面垂直的左后推力螺旋桨回转90
°
变为旋转面水平的左后推力螺旋桨,对称地,在上单翼固定翼飞机的右边固定翼下设置纵向的右支撑纵梁,在右支撑纵梁的前端设置右前水平铰,在右前水平铰上设置右前拉力螺旋桨,右前拉力螺旋桨的旋转面水平设置,设置倾转机构使右前拉力螺旋桨可绕右前水平铰向前倾转,使旋转面水平的右前拉力螺旋桨向前倾转90
°
变为旋转面垂直的右前拉力螺旋桨,或使旋转面垂直的右前拉力螺旋桨回转90
°
变为旋转面水平的右前拉力螺旋桨,在右支撑纵梁的后端设置右后水平铰,在右后水平铰上设置右后推力螺旋桨,右后推力螺旋桨的旋转面水平设置,设置倾转机构使右后推力螺旋桨可绕右后水平铰向后倾转,使旋转面水平的右后推力螺旋桨向后倾转90
°
变为旋转面垂直的右后推力螺旋桨,或使旋转面垂直的右后推力螺旋桨回转90
°
变为旋转面水平的右后推力螺旋桨,设置四个发动机分驱动四个螺旋桨,这样组成四个螺旋桨的全倾转多螺旋桨直升飞机。
5.全倾转多螺旋桨直升飞机的飞行原理是:设左前拉力螺旋桨的旋转面水平,拉力垂直向上,顺时针转,右前拉力螺旋桨的旋转面水平,拉力垂直向上,逆时针转;左后推力螺旋桨的旋转面水平,推力垂直向上,逆时针转,右后推力螺旋桨的旋转面水平,推力垂直向
上,顺时针转。
6.全倾转多螺旋桨直升飞机的飞行有两种方向模式,直升机模式和固定翼模式。
7.先说明直升机飞行模式:
8.加大四个发动机的油门,使左前拉力螺旋桨、右前拉力螺旋桨、左后推力螺旋桨和右后推力螺旋桨的转速相同的增加,四个螺旋桨的升力加大,当总升力大于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机垂直上升。
9.减少四个发动机的油门,使左前拉力螺旋桨、右前拉力螺旋桨、左后推力螺旋桨和右后推力螺旋桨的转速相同的减少,四个螺旋桨的升力减少,当总升力等于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机悬停。
10.继续减少四个发动机的油门,使左前拉力螺旋桨、右前拉力螺旋桨、左后推力螺旋桨和右后推力螺旋桨的转速相同的减少,四个螺旋桨的升力减少,当总升力小于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机垂直下降。
11.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨、左后推力螺旋桨的转速,左前拉力螺旋桨的拉力、左后推力螺旋桨的推力增大,同时,减少右前拉力螺旋桨、右后推力螺旋桨的转速,右前拉力螺旋桨的拉力、右后推力螺旋桨的推力减少,使机身向右横滚;减少左前拉力螺旋桨、左后推力螺旋桨的转速,左前拉力螺旋桨的拉力、左后推力螺旋桨的推力减少,同时,增大右前拉力螺旋桨、右后推力螺旋桨的转速,右前拉力螺旋桨的拉力、右后推力螺旋桨的推力增大,使机身向左横滚,实现横滚操纵。
12.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨、右前拉力螺旋桨的转速,左前拉力螺旋桨的拉力、右前拉力螺旋桨的拉力增大,同时,减少左后推力螺旋桨、右后推力螺旋桨的转速,左后推力螺旋桨的推力、右后推力螺旋桨的推力减少,使机身后仰;减少左前拉力螺旋桨、右前拉力螺旋桨的转速,左前拉力螺旋桨的拉力、右前拉力螺旋桨的拉力减少,同时,增大左后推力螺旋桨、右后推力螺旋桨的转速,左后推力螺旋桨的推力、右后推力螺旋桨的推力增大,使机身前俯,实现俯仰操纵。
13.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨、右后推力螺旋桨的转速,左前拉力螺旋桨的拉力、右后推力螺旋桨的推力增大,左前拉力螺旋桨的反扭矩、右后推力螺旋桨的反扭矩增大,由于左前拉力螺旋桨顺时针转、右后推力螺旋桨顺时针转,左前拉力螺旋桨的反扭矩、右后推力螺旋桨的反扭矩和增大,同时,减少右前拉力螺旋桨、左后推力螺旋桨的转速,右前拉力螺旋桨的拉力、左后推力螺旋桨的推力减少,右前拉力螺旋桨的反扭矩、左后推力螺旋桨的反扭矩减少,由于右前拉力螺旋桨逆时针转、左后推力螺旋桨逆时针转,右前拉力螺旋桨的反扭矩、左后推力螺旋桨的反扭矩和减少,顺时针转的螺旋桨的反扭矩和大于逆时针转的螺旋桨的反扭矩和,反扭矩使全倾转多螺旋桨直升飞机逆时针转,即向左转向;减少左前拉力螺旋桨、右后推力螺旋桨的转速,左前拉力螺旋桨的拉力、右后推力螺旋桨的推力减少,左前拉力螺旋桨的反扭矩、右后推力螺旋桨的反扭矩减少,由于左前拉力螺旋桨顺时针转、右后推力螺旋桨顺时针转,左前拉力螺旋桨的反扭矩、右后推力螺旋桨的反扭矩和减少,同时,增大右前拉力螺旋桨、左后推力螺旋桨的转速,右前拉力螺旋桨的拉力、左后推力螺旋桨的推力增大,右前拉力螺旋桨的反扭矩、左后推力螺旋桨的反扭矩增大,由于右前拉力螺旋桨逆时针转、左后推力螺旋桨逆时针转,右前拉力螺旋桨的反扭矩、左后推力螺旋桨的反扭矩和增大,顺时针转的螺旋桨的反扭矩和小于逆时针转的
螺旋桨的反扭矩和,反扭矩使全倾转多螺旋桨直升飞机顺时针转,即向右转向,实现航向操纵。
14.当全倾转多螺旋桨直升飞机在空中时,操纵机身前俯,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向前飞行;操纵机身后仰,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向后飞行;操纵机身前俯和向左旋转方向,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向左前方飞行;操纵机身前俯和向右旋转方向,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向右前方飞行;操纵机身向左横滚,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向左侧飞行;操纵机身向右横滚,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向右侧飞行,实现直升机模式飞行。
15.固定翼飞行模式:
16.当以直升机模式飞行的全倾转多螺旋桨直升飞机在空中时,加大四个发动机的油门,同时,倾转机构使左前拉力螺旋桨、右前拉力螺旋桨向前倾转,倾转机构使左后推力螺旋桨、右后推力螺旋桨向后倾转,左前拉力螺旋桨、右前拉力螺旋桨的拉力在水平方向的分力和左后推力螺旋桨、右后推力螺旋桨的推力在水平方向的分力使全倾转多螺旋桨直升飞机向前飞行,这时,固定翼产生升力。
17.当固定翼产生升力等于全倾转多螺旋桨直升飞机的重量时,继续使左前拉力螺旋桨、右前拉力螺旋桨向前倾转90
°
,使左前拉力螺旋桨、右前拉力螺旋桨的拉力全部水平向前,使左后推力螺旋桨、右后推力螺旋桨向后倾转90
°
,左后推力螺旋桨、右后推力螺旋桨的推力全部水平向前,左前拉力螺旋桨、右前拉力螺旋桨的水平拉力和左后推力螺旋桨、右后推力螺旋桨的水平推力驱动全倾转多螺旋桨直升飞机快速水平向前飞行,这时,固定翼上的襟翼操纵横滚,水平尾翼操纵俯仰,垂直尾翼操纵航向,实现固定翼模式飞行。
18.当以固定翼模式飞行的全倾转多螺旋桨直升飞机在空中时,减少四个发动机的油门,全倾转多螺旋桨直升飞机的固定翼产生的升力减少,当升力小于全倾转多螺旋桨直升飞机的重量时,倾转机构使左前拉力螺旋桨、右前拉力螺旋桨向后倾转,倾转机构使左后推力螺旋桨、右后推力螺旋桨向前倾转,左前拉力螺旋桨、右前拉力螺旋桨的拉力在垂直方向的分力和左后推力螺旋桨、右后推力螺旋桨的推力在垂直方向的分力使全倾转多螺旋桨直升飞机保持在空中,继续使左前拉力螺旋桨、右前拉力螺旋桨向后倾转90
°
,使左前拉力螺旋桨、右前拉力螺旋桨的拉力全部垂直向上,使左后推力螺旋桨、右后推力螺旋桨向前倾转90
°
,左后推力螺旋桨、右后推力螺旋桨的推力全部垂直向上,全倾转多螺旋桨直升返回直升机模式飞行。
19.全倾转多螺旋桨直升飞机不但可以以直升机模式垂直起降,还可以以固定翼模式利用跑道滑跑起降,在跑道上的全倾转多螺旋桨直升飞机,操纵倾转机构使左前拉力螺旋桨、右前拉力螺旋桨向前倾转90
°
,使左前拉力螺旋桨、右前拉力螺旋桨的旋转面垂直,拉力将全部水平向前,使左后推力螺旋桨、右后推力螺旋桨向后倾转90
°
,左后推力螺旋桨、右后推力螺旋桨的旋转面垂直,推力将全部水平向前,加大四个发动机的油门,左前拉力螺旋桨、右前拉力螺旋桨的水平拉力、左后推力螺旋桨、右后推力螺旋桨的水平推力共同驱动全倾转多螺旋桨直升飞机向前滑跑,固定翼产生升力,当升力大于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机滑跑起飞。
20.以固定翼模式飞行的全倾转多螺旋桨直升飞机在空中时,利用跑道降落,减少四
个发动机的油门,固定翼模式飞行的全倾转多螺旋桨直升飞机的速度下降,固定翼产生的升力减少,当升力小于固定翼模式飞行的全倾转多螺旋桨直升飞机时,固定翼模式飞行的全倾转多螺旋桨直升飞机下降,降落跑道滑跑降落。
21.要增加载重量,可以增大螺旋桨的功率,或在左支撑纵梁的左边设置第二左支撑纵梁,在第二左支撑纵梁的前端设置第二左前水平铰,在第二左前水平铰上设置第二左前拉力螺旋桨,第二左前拉力螺旋桨的旋转面水平设置,第二左前拉力螺旋桨可绕第二左前水平铰向前倾转,设置倾转机构使旋转面水平的第二左前拉力螺旋桨向前倾转90
°
变为旋转面垂直的第二左前拉力螺旋桨,或使旋转面垂直的第二左前拉力螺旋桨回转90
°
变为旋转面水平的第二左前拉力螺旋桨,在第二左支撑纵梁的后端设置第二左后水平铰,在第二左后水平铰上设置第二左后推力螺旋桨,第二左后推力螺旋桨的旋转面水平设置,第二左后推力螺旋桨可绕第二左后水平铰向后倾转,设置倾转机构使旋转面水平的第二左后推力螺旋桨向后倾转90
°
变为旋转面垂直的第二左后推力螺旋桨,或使旋转面垂直的第二左后推力螺旋桨回转90
°
变为旋转面水平的第二左后推力螺旋桨,对称地,在上单翼固定翼飞机的右边固定翼下设置纵向的第二右支撑纵梁,在第二右支撑纵梁的前端设置第二右前水平铰,在第二右前水平铰上设置第二右前拉力螺旋桨,第二右前拉力螺旋桨的旋转面水平设置,第二右前拉力螺旋桨可绕第二右前水平铰向前倾转,设置倾转机构使旋转面水平的第二右前拉力螺旋桨向前倾转90
°
变为旋转面垂直的第二右前拉力螺旋桨,或使旋转面垂直的第二右前拉力螺旋桨回转90
°
变为旋转面水平的第二右前拉力螺旋桨,在第二右支撑纵梁的后端设置第二右后水平铰,在第二右后水平铰上设置第二右后推力螺旋桨,第二右后推力螺旋桨的旋转面水平设置,第二右后推力螺旋桨可绕第二右后水平铰向后倾转,设置倾转机构使旋转面水平的第二右后推力螺旋桨向后倾转90
°
变为旋转面垂直的第二右后推力螺旋桨,或使旋转面垂直的第二右后推力螺旋桨回转90
°
变为旋转面水平的第二右后推力螺旋桨,这样组成八个螺旋桨的全倾转多螺旋桨直升飞机。
22.八个螺旋桨的全倾转多螺旋桨直升飞机的飞行方式与四个螺旋桨的全倾转多螺旋桨直升飞机的飞行方式相同,为了简化说明,在具体实施例中详细说明。
23.本实用新型的有益效果是,采用了上单翼固定翼飞机为主体,抬高了螺旋桨旋转面的高度,使螺旋桨在倾转的过程中不会碰撞到地面,支撑纵梁前端采用拉力螺旋桨和支撑纵梁后端采用推力螺旋桨,通过水平铰使旋转面水平的拉力螺旋桨可以向前倾转90
°
,拉力水平向前,使旋转面水平的推力螺旋桨可以向后倾转90
°
,推力水平向前,使全倾转多螺旋桨直升飞机可以工作在直升机模式或固定翼模式,并可以在由直升机模式和固定翼模式之间自由转换,以固定翼模式水平飞行时提高了螺旋桨的效率,既可以垂直升降,又可以滑跑起降,有机场利用机场滑跑起降,起降效率高,没有机场,采用垂直起降,灵活运用直升机模式和固定翼模式,可适用于偏远的、没有机场的地方起降,应用于运输,救援,测绘等领域。
附图说明
24.下面结合附图和实施例对本实用新型进一步说明。
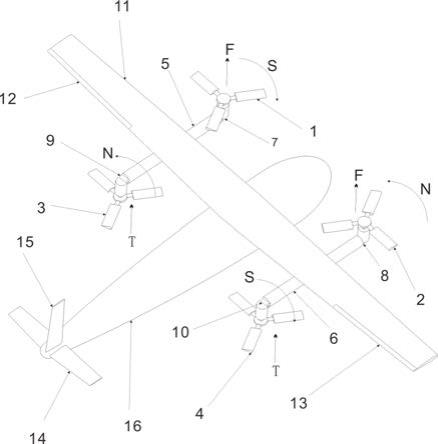
25.图1是本实用新型四个螺旋桨的全倾转多螺旋桨直升飞机螺旋桨未倾转时的三视图。
26.图2是本实用新型四个螺旋桨的全倾转多螺旋桨直升飞机螺旋桨未倾转时的轴测图。
27.图3是本实用新型四个螺旋桨的全倾转多螺旋桨直升飞机螺旋桨倾转90
°
并收起起落架水平飞行的轴测图。
28.图4是本实用新型八个螺旋桨的全倾转多螺旋桨直升飞机螺旋桨未倾转时的轴测图。
29.图5是本实用新型八个螺旋桨的全倾转多螺旋桨直升飞机螺旋桨倾转90
°
并收起起落架水平飞行的轴测图。
30.图中1. 左前拉力螺旋桨,2. 右前拉力螺旋桨,3. 左后推力螺旋桨,4. 右后推力螺旋桨, 5. 左支撑纵梁,6. 右支撑纵梁,7. 倾转机构左前水平铰,8. 倾转机构右前水平铰, 9.倾转机构左后水平铰,10.倾转机构右后水平铰, 11. 固定翼,12. 固定翼左边襟翼,13. 固定翼右边襟翼,14. 水平尾翼, 15.垂直尾翼, 16. 机身, 17. 起落架,31. 第二左前拉力螺旋桨,32. 第二右前拉力螺旋桨,33. 第二左后推力螺旋桨,34. 第二右后推力螺旋桨,35 第二左支撑纵梁,36 第二右支撑纵梁,37. 倾转机构第二左前水平铰,38. 倾转机构第二右前水平铰,39. 倾转机构第二左后水平铰,40. 倾转机构第二右后水平铰,f. 推力方向,t. 拉力方向,tq. 向前倾转方向,th. 向后倾转方向,s. 顺时针转,n. 逆时针转。
具体实施方式
31.在图1所示实施例中,全倾转多螺旋桨直升飞机机身16采用上单翼固定翼飞机为主体,上单翼固定翼飞机的尾部设置水平尾翼14和垂直尾15,上单翼固定翼飞机的固定翼11上设置左边襟翼12和右边襟翼13,上单翼固定翼飞机重心附近设置起落架,在上单翼固定翼飞机的左边固定翼下设置纵向的左支撑纵梁5,在左支撑纵梁5的前端设置左前水平铰7,在左前水平铰7上设置左前拉力螺旋桨1,左前拉力螺旋桨1的旋转面水平设置,设置倾转机构使左前拉力螺旋桨1可绕左前水平铰7向前倾转tq,使旋转面水平的左前拉力螺旋桨1向前倾转90
°
变为旋转面垂直的左前拉力螺旋桨1,或使旋转面垂直的左前拉力螺旋桨1回转90
°
变为旋转面水平的左前拉力螺旋桨1,在左支撑纵梁5的后端设置左后水平铰9,在左后水平铰9上设置左后推力螺旋桨3,左后推力螺旋桨3的旋转面水平设置,设置倾转机构使左后推力螺旋桨3可绕左后水平铰9向后倾转th,使旋转面水平的左后推力螺旋桨3向后倾转90
°
变为旋转面垂直的左后推力螺旋桨3,或使旋转面垂直的左后推力螺旋桨3回转90
°
变为旋转面水平的左后推力螺旋桨3,对称地,在上单翼固定翼飞机的右边固定翼下设置纵向的右支撑纵梁6,在右支撑纵梁6的前端设置右前水平铰8,在右前水平铰8上设置右前拉力螺旋桨2,右前拉力螺旋桨2的旋转面水平设置,设置倾转机构使右前拉力螺旋桨2可绕右前水平铰8向前倾转tq,使旋转面水平的右前拉力螺旋桨2向前倾转90
°
变为旋转面垂直的右前拉力螺旋桨2,或使旋转面垂直的右前拉力螺旋桨2回转90
°
变为旋转面水平的右前拉力螺旋桨2,在右支撑纵梁6的后端设置右后水平铰10,在右后水平铰10上设置右后推力螺旋桨4,右后推力螺旋桨4的旋转面水平设置,设置倾转机构使右后推力螺旋桨4可绕右后水平铰10向后倾转th,使旋转面水平的右后推力螺旋桨4向后倾转90
°
变为旋转面垂直的右后推力螺旋桨4,或使旋转面垂直的右后推力螺旋桨4回转90
°
变为旋转面水平的右后推力螺旋
桨4,设置四个发动机分驱动四个螺旋桨,这样组成四个螺旋桨的全倾转多螺旋桨直升飞机。
32.参见图2,设左前拉力螺旋桨1的旋转面水平,拉力f垂直向上,顺时针转s,右前拉力螺旋桨2的旋转面水平,拉力f垂直向上,逆时针转n;左后推力螺旋桨3的旋转面水平,推力t垂直向上,逆时针转n,右后推力螺旋桨4的旋转面水平,推力t垂直向上,顺时针转s。
33.全倾转多螺旋桨直升飞机的飞行有两种方向模式,直升机模式和固定翼模式。
34.直升机飞行模式:
35.加大四个发动机的油门,使左前拉力螺旋桨1、右前拉力螺旋桨2、左后推力螺旋桨3和右后推力螺旋桨4的转速相同的增加,四个螺旋桨的升力加大,当总升力大于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机垂直上升。
36.减少四个发动机的油门,使左前拉力螺旋桨1、右前拉力螺旋桨2、左后推力螺旋桨3和右后推力螺旋桨4的转速相同的减少,四个螺旋桨的升力减少,当总升力等于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机悬停。
37.继续减少四个发动机的油门,使左前拉力螺旋桨1、右前拉力螺旋桨2、左后推力螺旋桨3和右后推力螺旋桨4的转速相同的减少,四个螺旋桨的升力减少,当总升力小于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机垂直下降。
38.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨1、左后推力螺旋桨3的转速,左前拉力螺旋桨1的拉力f、左后推力螺旋桨3的推力t增大,同时,减少右前拉力螺旋桨2、右后推力螺旋桨4的转速,右前拉力螺旋桨2的拉力f、右后推力螺旋桨4的推力t减少,使机身16向右横滚;减少左前拉力螺旋桨1、左后推力螺旋桨3的转速,左前拉力螺旋桨1的拉力f、左后推力螺旋桨3的推力t减少,同时,增大右前拉力螺旋桨2、右后推力螺旋桨4的转速,右前拉力螺旋桨2的拉力f、右后推力螺旋桨4的推力增大t,使机身16向左横滚,实现横滚操纵。
39.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨1、右前拉力螺旋桨2的转速,左前拉力螺旋桨1的拉力f、右前拉力螺旋桨2的拉力f增大,同时,减少左后推力螺旋桨3、右后推力螺旋桨4的转速,左后推力螺旋桨3的推力t、右后推力螺旋桨4的推力t减少,使机身16后仰;减少左前拉力螺旋桨1、右前拉力螺旋桨2的转速,左前拉力螺旋桨1的拉力f、右前拉力螺旋桨2的拉力f减少,同时,增大左后推力螺旋桨3、右后推力螺旋桨4的转速,左后推力螺旋桨3的推力t、右后推力螺旋桨4的推力t增大,使机身16前俯,实现俯仰操纵。
40.当全倾转多螺旋桨直升飞机在空中时,加大左前拉力螺旋桨1、右后推力螺旋桨4的转速,左前拉力螺旋桨1的拉力f、右后推力螺旋桨4的推力t增大,左前拉力螺旋桨1的反扭矩、右后推力螺旋桨4的反扭矩增大,由于左前拉力螺旋桨1顺时针转s、右后推力螺旋桨4顺时针转s,左前拉力螺旋桨1的反扭矩、右后推力螺旋桨4的反扭矩和增大,同时,减少右前拉力螺旋桨2、左后推力螺旋桨3的转速,右前拉力螺旋桨2的拉力f、左后推力螺旋桨3的推力t减少,右前拉力螺旋桨2的反扭矩、左后推力螺旋桨3的反扭矩减少,由于右前拉力螺旋桨2逆时针转n、左后推力螺旋桨3逆时针转n,右前拉力螺旋桨2的反扭矩、左后推力螺旋桨3的反扭矩和减少,顺时针转s的螺旋桨的反扭矩和大于逆时针转n的螺旋桨的反扭矩和,反扭矩机身16逆时针转n,即向左转向;减少左前拉力螺旋桨1、右后推力螺旋桨4的转速,左前
拉力螺旋桨1的拉力f、右后推力螺旋桨4的推力t减少,左前拉力螺旋桨1的反扭矩、右后推力螺旋桨4的反扭矩减少,由于左前拉力螺旋桨1顺时针转s、右后推力螺旋桨4顺时针转s,左前拉力螺旋桨1的反扭矩、右后推力螺旋桨4的反扭矩和减少,同时,增大右前拉力螺旋桨2、左后推力螺旋桨3的转速,右前拉力螺旋桨2的拉力f、左后推力螺旋桨3的推力t增大,右前拉力螺旋桨2的反扭矩、左后推力螺旋桨3的反扭矩增大,由于右前拉力螺旋桨2逆时针转n、左后推力螺旋桨3逆时针转n,右前拉力螺旋桨2的反扭矩、左后推力螺旋桨3的反扭矩和增大,顺时针转s的螺旋桨的反扭矩和小于逆时针转n的螺旋桨的反扭矩和,反扭矩使机身顺时针转s,即向右转向,实现航向操纵。
41.当全倾转多螺旋桨直升飞机在空中时,操纵机身16前俯,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向前飞行;操纵机身16后仰,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向后飞行;操纵机身16前俯和向左转向,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向左前方飞行;操纵机身16前俯和向右转向,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向右前方飞行;操纵机身16向左横滚,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向左侧飞行;操纵机身16向右横滚,同时加大四个发动机的油门,全倾转多螺旋桨直升飞机向右侧飞行,实现直升机模式飞行。
42.固定翼飞行模式:
43.参见图3,当以直升机模式飞行的全倾转多螺旋桨直升飞机在空中时,加大四个发动机的油门,同时,倾转机构使左前拉力螺旋桨1、右前拉力螺旋桨2向前倾转tq,倾转机构使左后推力螺旋桨3、右后推力螺旋桨4向后倾转th,左前拉力螺旋桨1、右前拉力螺旋桨2的拉力f在水平方向的分力和左后推力螺旋桨3、右后推力螺旋桨4的推力t在水平方向的分力使全倾转多螺旋桨直升飞机向前飞行,这时,固定翼11产生升力。
44.当固定翼11产生升力等于全倾转多螺旋桨直升飞机的重量时,继续使左前拉力螺旋桨1、右前拉力螺旋桨2向前倾转90
°
,使左前拉力螺旋桨1、右前拉力螺旋桨2的拉力f全部水平向前,使左后推力螺旋桨3、右后推力螺旋桨4向后倾转90
°
,左后推力螺旋桨3、右后推力螺旋桨4的推力t全部水平向前,左前拉力螺旋桨1、右前拉力螺旋桨2的水平拉力f和左后推力螺旋桨3、右后推力螺旋桨4的水平推力t驱动全倾转多螺旋桨直升飞机快速水平向前飞行,这时,固定翼上11的左边襟翼12和右边机翼13操纵横滚,水平尾翼14操纵俯仰,垂直尾翼15操纵航向,实现固定翼模式飞行。
45.当以固定翼模式飞行的全倾转多螺旋桨直升飞机在空中时,减少四个发动机的油门,全倾转多螺旋桨直升飞机的固定翼11产生的升力减少,当升力小于全倾转多螺旋桨直升飞机的重量时,倾转机构使左前拉力螺旋桨1、右前拉力螺旋桨2向后回转,倾转机构使左后推力螺旋桨3、右后推力螺旋桨4向前回转,左前拉力螺旋桨1、右前拉力螺旋桨2的拉力f在垂直方向的分力和左后推力螺旋桨3、右后推力螺旋桨4的推力t在垂直方向的分力使全倾转多螺旋桨直升飞机保持在空中,继续使左前拉力螺旋桨1、右前拉力螺旋桨2向后回转90
°
,使左前拉力螺旋桨1、右前拉力螺旋桨2的拉力f全部垂直向上,使左后推力螺旋桨3、右后推力螺旋桨4向前回转90
°
,左后推力螺旋桨3、右后推力螺旋桨4的推力t全部垂直向上,全倾转多螺旋桨直升返回直升机模式飞行。
46.在跑道上的全倾转多螺旋桨直升飞机,操纵倾转机构使左前拉力螺旋桨1、右前拉力螺旋桨2向前倾转90
°
,使左前拉力螺旋桨1、右前拉力螺旋桨2的旋转面垂直,拉力f将全
部水平向前,使左后推力螺旋桨3、右后推力螺旋桨4向后倾转90
°
,左后推力螺旋桨3、右后推力螺旋桨4的旋转面垂直,推力t将全部水平向前,加大四个发动机的油门,左前拉力螺旋桨1、右前拉力螺旋桨2的水平拉力f、左后推力螺旋桨3、右后推力螺旋桨4的水平推力t共同驱动全倾转多螺旋桨直升飞机向前滑跑,固定翼11产生升力,当升力大于全倾转多螺旋桨直升飞机的重量时,全倾转多螺旋桨直升飞机滑跑起飞。
47.以固定翼模式飞行的全倾转多螺旋桨直升飞机在空中时,利用跑道降落,减少四个发动机的油门,固定翼模式飞行的全倾转多螺旋桨直升飞机的速度下降,固定翼11产生的升力减少,当升力小于固定翼模式飞行的全倾转多螺旋桨直升飞机时,固定翼模式飞行的全倾转多螺旋桨直升飞机下降,降落跑道滑跑降落。
48.在图4所示实施例中,为了增加载重量,是在图1所示实施例中增加螺旋桨,在左支撑纵梁5的左边设置第二左支撑纵梁35,在第二左支撑纵梁35的前端设置第二左前水平铰37,在第二左前水平铰37上设置第二左前拉力螺旋桨31,第二左前拉力螺旋桨31的旋转面水平设置,第二左前拉力螺旋桨31可绕第二左前水平铰37向前倾转,设置倾转机构使旋转面水平的第二左前拉力螺旋桨31向前倾转90
°
变为旋转面垂直的第二左前拉力螺旋桨31,参见图5,或使旋转面垂直的第二左前拉力螺旋桨31回转90
°
变为旋转面水平的第二左前拉力螺旋桨31,在第二左支撑纵梁35的后端设置第二左后水平铰39,在第二左后水平铰39上设置第二左后推力螺旋桨33,第二左后推力螺旋桨33的旋转面水平设置,第二左后推力螺旋桨33可绕第二左后水平铰39向后倾转,设置倾转机构使旋转面水平的第二左后推力螺旋桨33向后倾转90
°
变为旋转面垂直的第二左后推力螺旋桨33,或使旋转面垂直的第二左后推力螺旋桨33回转90
°
变为旋转面水平的第二左后推力螺旋桨33,对称地,在固定翼11右边下设置纵向的第二右支撑纵梁36,在第二右支撑纵梁36的前端设置第二右前水平铰38,在第二右前水平铰38上设置第二右前拉力螺旋桨32,第二右前拉力螺旋桨32的旋转面水平设置,第二右前拉力螺旋桨32可绕第二右前水平铰38向前倾转,设置倾转机构使旋转面水平的第二右前拉力螺旋桨32向前倾转90
°
变为旋转面垂直的第二右前拉力螺旋桨32,或使旋转面垂直的第二右前拉力螺旋桨32回转90
°
变为旋转面水平的第二右前拉力螺旋桨32,在第二右支撑纵梁36的后端设置第二右后水平铰40,在第二右后水平铰40上设置第二右后推力螺旋桨34,第二右后推力螺旋桨34的旋转面水平设置,第二右后推力螺旋桨34可绕第二右后水平铰40向后倾转,设置倾转机构使旋转面水平的第二右后推力螺旋桨34向后倾转90
°
变为旋转面垂直的第二右后推力螺旋桨34,或使旋转面垂直的第二右后推力螺旋桨34回转90
°
变为旋转面水平的第二右后推力螺旋桨34,这样组成八个螺旋桨的全倾转多螺旋桨直升飞机。
49.八个螺旋桨的全倾转多螺旋桨直升飞机的飞行方式与四个螺旋桨的全倾转多螺旋桨直升飞机相同,直升机模式时,利用左支撑纵梁5,右支撑纵梁6上的左前拉力螺旋桨1、右前拉力螺旋桨2、左后推力螺旋桨3、右后推力螺旋桨4联合操纵俯仰、横滚和航向,转入固定翼模式,固定翼上11的左边襟翼12和右边机翼13操纵横滚,水平尾翼14操纵俯仰,垂直尾翼15操纵航向,实现固定翼模式飞行。
50.也可以利用第二左支撑纵梁35,第二右支撑纵梁36上的第二左前拉力螺旋桨31、第二右前拉力螺旋桨32、第二左后推力螺旋桨33、第二右后推力螺旋桨34联合操纵俯仰、横滚和航向,实现直升机模式飞行,转入固定翼模式,固定翼上11的左边襟翼12和右边机翼13
操纵横滚,水平尾翼14操纵俯仰,垂直尾翼15操纵航向,实现固定翼模式飞行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。