1.本发明属于激光雷达点云的数据管理及点云金字塔构建方法领域,特别涉及该领域中的一种基于圆形扫描机载激光获取的点云数据,面向快速识别建筑物目标的数据存储和金字塔构建方法。
背景技术:
2.机载激光雷达以有人、无人飞行器为载体,在搭载于飞行器的飞行过程中对地面进行探测,采集地物的反射回波,并与定位、定姿数据联合解算为激光点云。激光雷达设备按照飞行作业的顺序获取并存储激光点,地理位置相邻但在不同时间采集的激光点在原始数据的存储关系上毫无关联。多个航带共同采集的建筑物点云具有以下特征:(1)每个航带上采集的建筑物点在存储位置上相对连续、集中;(2)不同航带间采集的建筑物点集在存储位置上是独立的、离散的。
3.由于建筑物目标的长、宽等尺寸较大,低空飞行时一条航带中采集的数据无法覆盖整个建筑物,需要对探测区域内多航带采集的数据统一处理后再展开建筑物的识别。而目前常用的可生成点云las文件的商用软件(如global mapper、cloud compare等),在接收到按时间顺序输入的激光点集后,输出的las文件中激光点也是按照采集时间连续存储,无法为地理位置临近的点建立联系。而激光雷达在获取点云时采用了360
°
圆式扫描,使得飞行方向上相邻位置的激光点之间夹杂了更多扫描圆上的其它数据,进一步离散了同一航带上采集的建筑物点集之间的存储顺序。
技术实现要素:
4.本发明所要解决的技术问题就是提供一种面向建筑物快速识别的基于圆形扫描机载激光雷达点云的数据存储管理方法。
5.本发明采用如下技术方案:
6.一种面向建筑物快速识别的基于圆形扫描机载激光雷达点云的数据存储管理方法,其改进之处包括如下步骤:
7.步骤1,建立点云分块式las文件:
8.步骤11,确定探测区域的地理空间大小;
9.步骤12,将探测区域按照地理坐标划分为若干个大小相等的矩形空间,并为每个空间建立一个独立的las文件,确定各分块式las文件对应的x、y坐标起、止值;
10.步骤13,激光探测波形、定位、定姿联合解算,解算数据按x、y坐标位置装入分块式las文件;
11.步骤2,构建点云金字塔:
12.步骤21,读取las文件的x、y坐标最大值、最小值、点云数量;
13.步骤22,确定金字塔的逐层抽稀比例k;
14.步骤23,把las文件对应的地理区域划分为n
×
m个上层矩形小空间,确定矩形小空间m、n的数值;
15.步骤24,确定抽稀后每个小空间内的点云数量;
16.步骤25,加载点云文件,按照点云数据的存储顺序对相邻点云进行等间隔抽稀;
17.步骤26,按照分块式las文件的地理坐标关联所有las文件的抽稀结果;如上层矩形小空间内的点云数已满足抽稀要求,则后续不再将点加入该空间内,直至所有矩形小空间都被填满则认为第二层点云构建完毕;
18.步骤27,逐层抽稀构建高层点云结构,直至所有las文件中的点均被构建到一层中时,完成点云金字塔构建。
19.进一步的,在步骤12中,las文件采用行号 列号的方式命名,同一行号的las文件按照列号递增的顺序在地理位置上相邻,同一列号的文件按照行号递增的方式在地理位置中相邻,若干个名称相关的文件共同构建采集区域的全景点云模型。
20.进一步的,在步骤13中,同一las文件内的激光点仍按采集顺序存储。
21.进一步的,使用的数据由圆形扫描的激光雷达设备搭载低空飞行器采集,该设备对地观测角为20
°
。
22.本发明的有益效果是:
23.本发明所公开的方法,以机载圆形扫描激光雷达获取点云为基础,以辅助建筑物目标的快速识别为目标,重点关注点云数据的存储及金字塔构建方法,针对圆形扫描激光雷达采集数据的特点,对通用的数据存储、构建点云金字塔的方法进行了改进,为后续建筑物目标的快速、有效识别奠定了基础。
附图说明
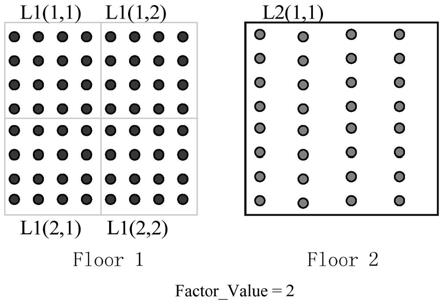
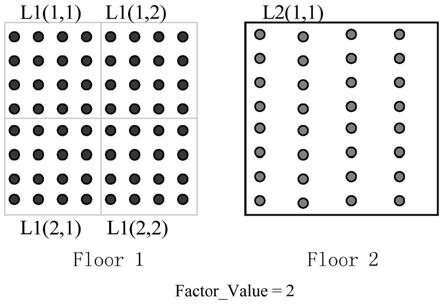
24.图1是理论上的点云金字塔存储结构示意图;
25.图2是圆形扫描激光雷达数据采集方式示意图;
26.图3是分块式las文件存储方式示意图;
27.图4是分块式存储点云文件内的数据组织方式示意图;
28.图5是构建金字塔时的抽稀效果示意图;
29.图6是原始点云图;
30.图7是快速识别效果图。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
32.实施例1,本实施例公开了一种面向建筑物快速识别的基于圆形扫描机载激光雷达点云的数据存储管理方法,包括如下步骤:
33.步骤1,建立点云分块式las文件:
34.步骤11,确定探测区域的地理空间大小;
35.步骤12,采用分块式las文件存储方式,在解析激光雷达采集原始数据、构建点云
存储结构时将飞行探测区域按照地理坐标划分为多个大小相等的矩形空间,并为每个空间建立一个独立的las文件,确定各分块式las文件对应的x、y坐标起、止值,使得las文件中包括了目标区域在多个航带、多次扫描中的激光点集。这种分块式las文件存储点云的数据组织方式在las文件内部实现了临近位置激光点之间的关联;
36.las文件采用行号 列号的方式命名,同一行号的las文件按照列号递增的顺序在地理位置上相邻,同一列号的文件按照行号递增的方式在地理位置中相邻,多个名称相关的文件共同构建采集区域的全景点云模型。
37.步骤13,激光探测波形、定位、定姿联合解算,解算数据按x、y坐标位置装入分块式las文件;
38.由于本方法中使用的试验采集数据密度较大,为节省数据处理时间,同一las文件内的激光点仍按采集顺序存储。
39.步骤2,构建点云金字塔:
40.理论上构建点云金字塔的方法是首先根据点云的整体空间范围,将空间划分为多个大小一致的方格,再依据坐标将每个点放入对应的方格,实现原始点云(第一层)与空间的对应。第二层中的点云由第一层等比例抽稀得到,第三层的点云由第二层等比例抽稀得到,依次类推,直至抽稀后的全部点云都在某一层的同一个方格内部,金字塔构建完成。
41.上述构建点云金字塔的方法首先要求将全部激光点云按照行、列顺序(对应地理坐标的x、y)进行排序,由于激光点云数据量大,在对一次作业采集的全部点云数据按照地理坐标排列时,将面临巨大的计算复杂度和时间复杂度。为了克服上述缺点,本方法构建点云金字塔的步骤如下:
42.步骤21,读取las文件的x、y坐标最大值、最小值、点云数量;
43.步骤22,确定金字塔的逐层抽稀比例k;
44.步骤23,把las文件对应的地理区域划分为n
×
m个上层矩形小空间,确定矩形小空间m、n的数值;
45.步骤24,确定抽稀后每个小空间内的点云数量;
46.步骤25,加载点云文件,按照点云数据的存储顺序对相邻点云进行等间隔抽稀;
47.步骤26,按照分块式las文件的地理坐标关联所有las文件的抽稀结果;如上层矩形小空间内的点云数已满足抽稀要求,则后续不再将点加入该空间内,直至所有矩形小空间都被填满则认为第二层点云构建完毕;
48.步骤27,按照上述方法逐层进行点云抽稀构建高层点云结构,直至所有las文件中的点均被构建到一层中时,完成点云金字塔构建。
49.由于圆形扫描的激光雷达设备在对地观测时具有一定的倾斜角度,更容易获取建筑物的立面信息,因而本实施例中使用的数据由圆形扫描的激光雷达设备搭载低空飞行器采集,该设备对地观测角为20
°
。
50.图1是理论上的点云金字塔存储结构示意图;图2是圆形扫描激光雷达数据采集方式示意图;图3是分块式las文件存储方式示意图;图4是分块式存储点云文件内的数据组织方式示意图;图5是构建金字塔时的抽稀效果示意图;图6是原始点云图;图7是快速识别效果图。
51.加载约14.2gb机载激光雷达点云数据(200m航高),采用前述方法进行数据存储并
构建点云金字塔后,依次使用点云滤波、平面分割、区域特征识别等方法进行建筑物目标的识别,识别时间约10分钟,主要的建筑物都能被识别,虽然有建筑物的边缘无法识别以及少量在建筑物周围的植被点被错误识别为建筑物的情况,但并不影响整体的识别效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。