1.本发明涉及一种基于挖掘机智能扫描的基坑时空分布监测系统
背景技术:
2.随着我国城市经济的发展,国土空间越来越紧张,地下空间的开发力度加大,基坑工程项目快速增加。
3.基坑土方开挖过程中,时空分布是基坑工程的重要参考指标,它可以辅助分析土方开挖过程中基坑围护结构变形机理,同时预测基坑围护变形的可能发展趋势,为基坑的安全性分析提供可靠支撑。
4.现阶段针对土方开挖过程中基坑空间分布无法作出较为精确的监测。其次,基坑开挖阶段中实时监测空间分布的可行性技术并未提及。因此,为实现基坑开挖过程中空间分布的精确观测,提供实时观测结果,发明了一种基于挖掘机智能扫描的基坑时空分布监测系统。
技术实现要素:
5.针对现有技术的基坑开挖过程中时空分布监测的局限性,本发明提出一种基于挖掘机智能扫描的基坑时空分布监测系统。
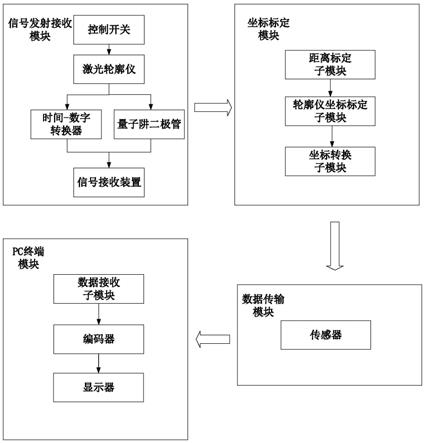
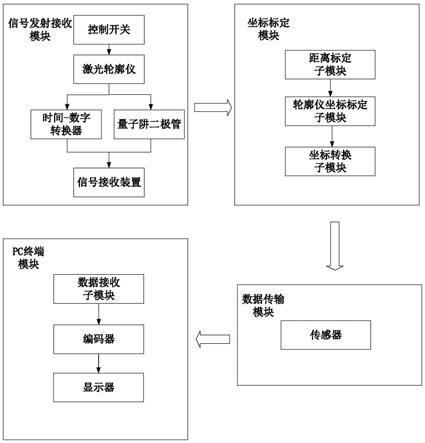
6.一种基于挖掘机智能扫描的基坑时空分布监测系统,其特征在于,包括:信号发射接收模块、坐标标定模块、数据传输模块、pc终端模块。信号发射接收模块受驾驶室控制开关指令发射激光信号并接收反射回的激光信号,坐标标定模块计算被扫描点5在基坑空间坐标下的具体位置,坐标转换模块用于将轮廓仪坐标系转化为工作坐标系,数据传输模块利用传感器将数据处理信息传输至pc终端模块,pc终端模块对数据信息进行编程处理,并最终将时间与空间结合的4d云图通过显示器展示。
7.信号发射接收模块(1),信号发射接收模块包括控制开关、激光轮廓仪和信号接收装置。信号发射接收模块中的控制开关用于发送信号采集指令,当接收到控制开关的采集指令后激光轮廓仪发射激光信号,激光信号在遇到被扫描点5后直线返回,同时信号接收装置接收反射回来的激光。单光子二极管在信号激光发射与接收的同时各打上击穿标记,并进一步利用时间—数字转换器给击穿标记打上时间戳信息,得到激光传播的总时间t。
8.坐标标定模块(2),坐标标定模块包括距离标定子模块、轮廓仪坐标标定子模块和坐标转换子模块,距离标定子模块通过激光传播的总时间t计算被扫描点5距离挖掘机上激光轮廓仪的距离s0,轮廓仪坐标标定子模块通过挖掘机上激光轮廓仪在轮廓仪坐标系下的坐标(x0,y0,z0)、挖掘机机械臂上激光轮廓仪与水平面的夹角及被扫描点5距离激光轮廓仪的距离s0计算被扫描点5相对于激光轮廓仪坐标(x1,y1,z1)的具体位置,具体计算方法如下:
9.s0=t
×
v
÷2ꢀꢀ
(1)
10.[0011][0012][0013]
其中,当被扫描点5位于激光轮廓仪东侧时,x1为反之,x1为当被扫描点5位于激光轮廓仪北侧时,y1为反之,y1为当被扫描点5高于激光轮廓仪高程时,z1为反之,z1为
[0014]
坐标转换子模块将挖掘机所处的轮廓仪坐标系转化为工作坐标系,当确定了挖掘机被扫描点5在轮廓仪坐标系中的坐标后,通过坐标转换模块转换为工作坐标系的相对位置,转换方法如下:
[0015][0016][0017][0018]
其中,{s}为轮廓仪坐标系;{w}为工作坐标系;p为被扫描点5在轮廓仪坐标系下的坐标,可表示为p=[x
1 y
1 z1]
t
;
a
p为{s}坐标系原点相对于{w}坐标原点的位置矢量;
ws
r为3
×
3旋转矩阵,是{s}相对于{w}的表达,用{s}中每个矢量在{w}中单位方向分量表示,
w
x
s
、
w
y
s
、
w
z
s
表示用坐标系{w}表达时的坐标{s}主轴方向的单位矢量;标量a
ij
,其中i=1,2,3,j=1,2,3,表示{s}中每个矢量在其参考系{w}中单位方向上投影的分量。
[0019]
数据传输模块(3),数据传输模块利用传感器将数据处理模块计算得到的被扫描点5坐标信息传输至挖掘机驾驶室内的pc终端模块。
[0020]
pc终端模块(4),pc终端模块包括数据接收子模块、编码器和显示器,数据接收子模块接收传输过来的数据信息,编码器利用编程软件对被测得到的时间
‑
空间数据信息进行编程处理,生成基于时间
‑
空间的4d云图,最后通过显示器展现4d云图。
[0021]
优选地,所述安装于挖掘机机械臂上的激光轮廓仪在平面内上下转动,通过发射接收激光信号得到激光轮廓仪与被扫描点5的距离s0。
[0022]
优选地,所述安装于挖掘机机械臂上的坐标标定模块通过挖掘机上激光轮廓仪在轮廓仪坐标系下的坐标(x0,y0,z0)、激光轮廓仪与水平面夹角机械臂与挖掘机主轴的夹角θ计算被扫描点5在轮廓仪坐标系下的坐标(x1,y1,z1);坐标转换模块通过坐标转换矩阵将被扫描点5在轮廓仪坐标系下的坐标转化为工作坐标系下的坐标(x2,y2,z2)。
[0023]
优选地,坐标转换模块将被扫描点5的pc终端模块内的编码器可利用matlab软件将激光轮廓仪监测得到的x、y和z坐标与时间
‑
数字转换器得到的时间戳信息结合,生成时空分布4d云图。
[0024]
本发明的一种基于挖掘机智能扫描的基坑时空分布监测系统,用于实时监测土方
开挖过程中基坑内部的时空分布情况。对于基坑时空分布的信息采集主要由信号发射接收模块完成,控制开关发送信号采集命令,激光轮廓仪发射激光信号,同时信号接收装置接收反射回来的激光,单光子二极管在信号激光发射与接收的同时各打上击穿标记,并进一步利用时间—数字转换器给击穿标记打上时间戳信息,得到激光传播的总时间t。对于采集到信息的处理及坐标标定主要由坐标标定模块完成,距离标定子模块通过激光传播的总时间t计算被扫描点5距离挖掘机上激光轮廓仪的距离s0,坐标标定子模块通过挖掘机机械臂上激光轮廓仪与水平面的夹角及被扫描点5距离激光轮廓仪的距离s0计算被扫描点5相对于激光轮廓仪坐标的具体位置,坐标转换子模块将挖掘机所处的轮廓仪坐标系转化为工作坐标系。对于信号的传输主要由信号传输模块中的传感器完成,其主要负责将数据信息传输到pc终端模块。对于信息的可视化处理主要由pc终端模块完成,数据接收子模块接收传输过来的数据信息,编码器利用编程软件对被测得到的时间
‑
空间数据信息进行编程处理,生成基于时间
‑
空间的4d云图,最后通过显示器展现4d云图。
[0025]
本发明的优点是:
[0026]
(1)本发明作为一类挖掘机附属的地形分布监测系统,可通过位于挖掘机机械臂上的信号发射接收模块,实现基坑土方开挖过程中土方分布信息的精确采集,并与时间信息相结合,收集基坑时空分布观测信息。具有实时性、精确性、便捷性。
[0027]
(2)本发明可通过pc终端模块生成时空分布可视化云图,形象化表达便于土方开挖阶段性造价计算。
附图说明
[0028]
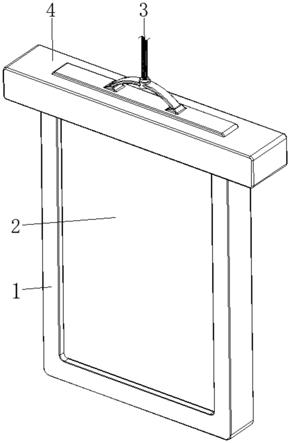
图1是本发明的使用状态的侧视图。
[0029]
图2是本发明的使用状态的后视图。
[0030]
图3是本发明的使用状态的俯视图。
[0031]
图4是本发明的坐标转换模块运作关系。
[0032]
图5是本发明的运作流程框图。
具体实施方式
[0033]
下面结合附图进一步说明本发明的技术方案。
[0034]
本发明提出的一种基于挖掘机智能扫描的基坑时空分布监测系统,其特征是,主要用于基坑土方开挖过程中时空分布的监测,具体的监测方法如下:
[0035]
步骤一:在开挖范围内利用挖掘机进行土方开挖的同时,通过移动挖掘机位置及转动位于挖掘机动臂上的激光轮廓仪扫描基坑内部点位。信号发射接收模块中的控制开关发送信号采集指令,激光轮廓仪接收指令后发射激光信号,激光信号在遇到被扫描点5后直线反射,信号接收模块接收反射回来的激光信号。单光子二极管在信号发射与接收的同时各打上击穿标记,时间—数字转换器给击穿打上时间戳信息,通过时间戳信息得到激光传播的总时间t。
[0036]
步骤二:坐标标定模块中的距离标定子模块通过激光飞行速度v与激光传播时间t计算出被扫描点5与激光轮廓仪的距离s0,计算方法如式1;轮廓仪坐标标定子模块通过挖掘机机械臂上激光轮廓仪与水平面的夹角及被扫描点5距离激光轮廓仪的距离s0计算被
扫描点5相对于激光轮廓仪坐标(x1,y1,z1)的具体位置,计算方法如式2~4。坐标转换子模块将挖掘机所处的轮廓仪坐标系转化为工作坐标系,当确定了挖掘机被扫描点5在轮廓仪坐标系中的坐标后,通过坐标转换模块转换为在工作坐标系中的坐标(x2,y2,z2),计算方法如式5~7。
[0037]
步骤三:数据传输模块利用传感器将数据处理模块计算得到的被扫描点5坐标信息传输至挖掘机驾驶室内的pc终端模块。
[0038]
步骤四:pc终端模块中的数据接收子模块接收传输过来的数据信息,编码器利用编程软件对被测得到的时间
‑
空间数据信息进行编程处理,生成基于时间
‑
空间的4d云图,最后通过显示器展现4d云图。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。