1.本发明涉及交流电机控制技术领域,特别是一种无轴承同步磁阻电机转速估算系统构造方法。
背景技术:
2.无轴承同步磁阻电机是在普通同步磁阻电机基础上发展起来的一种交流特种电机,其主要结构特征在于其定子槽中安装了两套绕组,即用于拖动负载转矩的转矩绕组和支承转子悬浮的悬浮绕组。两台逆变器分别向转矩绕组和悬浮绕组供电,用以产生合成磁场并施加于电机转子,同步实现电机转子的稳定悬浮和可靠旋转。
3.转速闭环控制是实现无轴承同步磁阻电机高性能转动控制的前提,构造转速闭环控制系统的首要前提是电机安装机械式速度传感器,由速度传感器来获取转速信息。但无轴承同步磁阻电机本身内部已经安装了复杂的转子位移传感器,安装过多的传感器破坏了电机原有结构的坚固性,增加了控制系统的成本和控制难度。此外速度传感器在高转速、环境恶劣等场合应用时会出现较大的检测误差,进一步降低了转速和转矩控制系统的可靠性。
4.为省略无轴承同步磁阻电机的速度传感器,简化系统硬件结构,实现无速度传感器下无轴承同步磁阻电机转子的可靠旋转,需采用一些新的控制方法。
技术实现要素:
5.本发明所要解决的技术问题是克服现有技术的不足而提供一种无轴承同步磁阻电机转速估算系统构造方法,基于构建的转速估算系统,本发明具有较高的转速估算精度,控制系统易于实现,系统响应快速,能有效避免电机安装传统速度传感器导致的一系列问题。
6.本发明为解决上述技术问题采用以下技术方案:
7.根据本发明提出的一种无轴承同步磁阻电机转速估算系统构造方法,包括以下步骤:
8.步骤1、构造坐标变换,检测无轴承同步磁阻电机转矩绕组的三相电流和三相电压,经坐标变换后,得到同步旋转d
‑
q轴坐标下两相电流i
1d
、i
1q
和两相电压u
1d
、u
1q
;
9.步骤2、构建电机转速估算器,步骤1中两相电流i
1d
、i
1q
和两相电压u
1d
、u
1q
作为电机转速估算器的输入信号,电机转速估算器输出信号为电机转速最终估算值经积分运算后得到转子位置角估算值用于坐标变换;
10.步骤3、建立虚拟控制器,电机转速最终估算值转速参考值ω
*
和之间的偏差同步旋转d
‑
q轴坐标下励磁电流分量参考值作为虚拟控制器输入信号,虚拟控制器输出同步旋转d
‑
q轴坐标下转矩电流分量参考值
11.步骤4、构建pi调节器,同步旋转d
‑
q轴坐标下励磁电流分量参考值虚拟控制器
输出的转矩电流分量参考值与步骤1中坐标变换输出的两相电流i
1d
、i
1q
之间的偏差送入pi调节器,pi调节器输出两相电压参考值
12.步骤5、构造广义逆变器,将步骤4中pi调节器输出的两相电压参考值作为广义逆变器的输入信号,广义逆变器输出实际需要的三相电压向电机转矩绕组供电,实现无速度传感器下电机转子的稳定旋转运行。
13.作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,步骤1中构建坐标变换,该坐标变换包括clark变换和park变换,检测出的无轴承同步磁阻电机转矩绕组的三相电压u
1a
、u
1b
、u
1c
、转子位置角估算值作为clark变换的输入信号,输入信号首先经clark变换输出两相静止坐标下的电压检测值u
1α
、u
1β
,u
1α
、u
1β
再经park变换输出同步旋转d
‑
q轴坐标下两相电压u
1d
、u
1q
;检测出的无轴承同步磁阻电机转矩绕组的三相电流i
1a
、i
1b
、i
1c
、转子位置角估算值作为clark变换输入信号,i
1a
、i
1b
、i
1c
、经clark变换输出两相静止坐标下电流检测值i
1α
、i
1β
,i
1α
、i
1β
再经park变换输出同步旋转d
‑
q轴坐标下两相电流i
1d
、i
1q
。
14.作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,步骤2具体如下:
15.步骤2.1、建立无轴承同步磁阻电机的电机转速估算器,电机转速估算器为:
[0016][0017]
其中,为电机转速最终估算值,l
1d
、l
1q
分别为定子d
‑
q轴转矩绕组自感,t
s
为采样周期,为参数m的估算值,为参数r的估算值,ω为电机转速实际值;
[0018]
步骤2.2、步骤1中构造的坐标变换,其输出的u
1d
、u
1q
和i
1d
、i
1q
作为步骤2.1中无轴承同步磁阻电机的电机转速估算器的输入信号,步骤2.1中转速估算器输出信号为电机转速最终估算值经积分运算后得到转子位置角估算值作为坐标变换输入信号之一。
[0019]
作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,步骤2.1建立无轴承同步磁阻电机的电机转速估算器的具体过程如下:
[0020]
忽略电机转子偏心位移引起的磁链、电压和电流变化,在同步旋转d
‑
q坐标下无轴承同步磁阻电机转矩绕组的定子电流方程为:
[0021]
[0022]
式中,r1是转矩绕组电阻,ω为电机转速实际值,为微分算子,t表示时间;
[0023]
将式(1)离散化,首先令下式成立:
[0024][0025]
式中,i
1d
(n 1)、i
1q
(n 1)分别为电机转矩绕组d、q轴电流在n 1时刻采样值;i
1d
(n)、i
1q
(n)分别为电机转矩绕组d、q轴电流在n时刻采样值;
[0026]
将式(2)代入式(1),得式(1)的离散化形式为:
[0027][0028]
式中,u
1d
(n)、u
1q
(n)分别为电机转矩绕组d、q轴电压在n时刻采样值;
[0029]
将式(3)改写成最小二乘法模型为:
[0030][0031]
其中,上标t为转置,令式(4)中分别对参数m、参数r采用最小二乘法进行辨识,其辨识模型分别为:
[0032]
m(n)=m(n
‑
1) j1(n)[y1(n)
‑
φ
1t
(n)]m(n
‑
1)
ꢀꢀ
(5)
[0033][0034]
式(5)、(6)中:
[0035]
m(n)、r(n)分别为m、r在n时刻采样值;m(n
‑
1)、r(n
‑
1)分别为m、r在n
‑
1时刻采样值;
[0036]
y1(n)、y2(n)为输出矩阵,且y1(n)=i
1d
(n 1)、y2(n)=i
1q
(n 1);
[0037]
φ1(n)为输入矩阵φ1在n时刻采样值,φ
1t
(n)=[i
1d
(n) i
1q
(n) u
1d
(n)]
t
;
[0038]
φ2(n)为输入矩阵φ2在n时刻采样值,
[0039]
j1(n)为矩阵j1在n时刻采样值,在n时刻采样值,其中k1(n)、k1(n
‑
1)分别为矩阵k1在n和n
‑
1时刻采样值,δ1为参数,0<δ1<1,i为单位矩阵;
[0040]
j2(n)为矩阵j2在n时刻采样值,在n时刻采样值,其中k2(n)、k2(n
‑
1)分别为矩阵k2在n和n
‑
1时刻采样值,δ2为参数,0<δ2<1,i为单位矩阵;
[0041]
依据式(5)对参数m进行估算,得到参数m的估算值为当获取参数m的估算值后,进一步推出与对应的转速估算值为:
[0042][0043]
依据式(6)对参数r进行估算,得到参数r的估算值为当获取参数r的估算值后,进一步推导出与对应的转速估算值为:
[0044][0045]
对公式(7)、(8)下的转速估算值取平均值,即得到电机转速最终估算值为:
[0046][0047]
作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,步骤3具体如下:
[0048]
步骤3.1、建立虚拟控制器:
[0049]
其中,为虚拟控制器的输出信号,b为摩擦系数,t
l
为负载转矩,n为转动惯量,λ为参数,λ>0,p1为转矩绕组极对数,为转速参考值ω
*
和之间的偏差,即
[0050]
步骤3.2、步骤3.1中建立的虚拟控制器输入信号之一为转速参考值ω
*
和最终估算值之间的偏差,输入信号之二为电机励磁电流分量参考值输入信号之三为电机转速最终估算值经虚拟控制器运算后输出
[0051]
作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,步骤3.1具体包括:
[0052]
对于无轴承同步磁阻电机,采用i
1d
控制时,i
1d
=不为零常数,电机的电磁转矩方程为:
[0053][0054]
式中,t
e
为电磁转矩;
[0055]
将式(10)代入无轴承同步磁阻电机的运动方程,得到下式:
[0056][0057]
式中,n为转动惯量,b为摩擦系数;
[0058]
假定电机转速参考值为ω
*
,电机转速参考值和转速实际值之间的偏差为e
ω
,则e
ω
=ω
*
‑
ω,对e
ω
求导,得到下式:
[0059][0060]
取参数则设计如下方程:
[0061][0062]
式中,参数λ>0;
[0063]
用电机转速最终估算值代替转速实际值ω,用代替e
ω
,用励磁电流分量参考值代替实际值i
1d
,由式(13)计算出虚拟控制器的输出信号为:
[0064][0065]
作为本发明所述的一种无轴承同步磁阻电机转速估算系统构造方法进一步优化方案,在步骤5中,建立广义逆变器,具体如下:
[0066]
步骤4中pi调节器输出的同步旋转d
‑
q坐标下两相电压参考值经park逆变换后输出两相静止坐标下电压参考值再经clark逆变换输出三相静止坐标下电压参考值压参考值作为spwm逆变器的输入信号,spwm逆变器向无轴承同步磁阻电机转矩绕组供电,实现电机转速的有效估算和转子稳定旋转。
[0067]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0068]
本发明提供的转速估算系统,去除了传统机械式速度传感器,简化了电机整体系统结构,有较高的转速估算精度、快速的转速跟踪性能和较强的系统稳定性,解决了电机安装速度传感器导致的结构复杂、控制难度较大等问题。
附图说明
[0069]
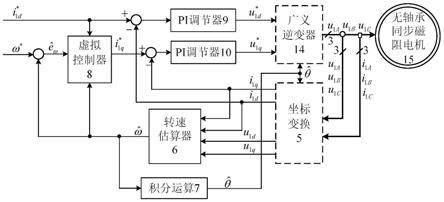
图1是本发明无轴承同步磁阻电机转速估算系统的原理框图。
[0070]
图2是坐标变换的原理框图。
[0071]
图3是广义逆变器的原理框图。
具体实施方式
[0072]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0073]
本发明中无轴承同步磁阻电机转速估算系统进行转速估算时,首先检测电机转矩绕组三相电压和三相电流,用于构造无轴承同步磁阻电机转速估算器,从而获取转速估算值。
[0074]
图1是本发明无轴承同步磁阻电机转速估算系统的原理框图,一种无轴承同步磁阻电机转速估算系统的构造方法,包括以下步骤:
[0075]
步骤1、构造坐标变换,检测无轴承同步磁阻电机转矩绕组的三相电流和三相电压,经坐标变换后,得到同步旋转d
‑
q轴坐标下两相电流i
1d
、i
1q
和两相电压u
1d
、u
1q
;
[0076]
步骤2、构建电机转速估算器,步骤1中两相电流i
1d
、i
1q
和两相电压u
1d
、u
1q
作为电机转速估算器的输入信号,电机转速估算器输出信号为电机转速最终估算值经积分运算后得到转子位置角估算值用于坐标变换;
[0077]
步骤3、建立虚拟控制器,电机转速最终估算值转速参考值ω
*
和电机转速最终估算值之间的偏差同步旋转d
‑
q轴坐标下励磁电流分量参考值作为虚拟控制器输入信号,虚拟控制器输出同步旋转坐标下转矩电流分量参考值
[0078]
步骤4、构建pi调节器,同步旋转d
‑
q轴坐标下励磁电流分量参考值虚拟控制器输出的转矩电流分量参考值与步骤1中坐标变换输出的两相电流i
1d
、i
1q
之间的偏差送入pi调节器,pi调节器输出两相电压参考值
[0079]
步骤5、构造广义逆变器,将步骤4中pi调节器输出的两相电压参考值作为广义逆变器的输入信号,广义逆变器输出实际需要的三相电压向电机转矩绕组供电,实现无速度传感器下电机转子的稳定旋转运行。
[0080]
图2是坐标变换的原理框图,进一步地,在步骤1中构建坐标变换,该坐标变换包括clark变换和park变换,检测出的无轴承同步磁阻电机转矩绕组的三相电压u
1a
、u
1b
、u
1c
、转子位置角估算值作为clark变换的输入信号,输入信号首先经clark变换输出两相静止坐标下的电压检测值u
1α
、u
1β
,u
1α
、u
1β
再经park变换输出同步旋转d
‑
q轴坐标下两相电压u
1d
、u
1q
;检测出的无轴承同步磁阻电机转矩绕组的三相电流i
1a
、i
1b
、i
1c
、转子位置角估算值作为clark变换输入信号,i
1a
、i
1b
、i
1c
、经clark变换输出两相静止坐标下电流检测值i
1α
、i
1β
,i
1α
、i
1β
再经park变换输出同步旋转d
‑
q轴坐标下两相电流i
1d
、i
1q
。
[0081]
进一步地,步骤2具体如下:
[0082]
步骤2.1、建立无轴承同步磁阻电机的电机转速估算器。忽略电机转子偏心位移引起的磁链、电压和电流变化,在同步旋转d
‑
q坐标下无轴承同步磁阻电机转矩绕组的定子电流方程为:
[0083][0084]
式中,r1是转矩绕组电阻,ω为电机转速实际值,l
1d
、l
1q
分别为定子d
‑
q轴转矩绕组自感,为微分算子,t表示时间;
[0085]
将式(1)离散化,首先令下式成立:
[0086][0087]
式中,i
1d
(n 1)、i
1q
(n 1)分别为电机转矩绕组d、q轴电流在n 1时刻采样值;i
1d
(n)、i
1q
(n)分别为电机转矩绕组d、q轴电流在n时刻采样值;t
s
为采样周期;
[0088]
将式(2)代入式(1),得式(1)的离散化形式为:
[0089][0090]
式中,u
1d
(n)、u
1q
(n)分别为电机转矩绕组d、q轴电压在n时刻采样值;
[0091]
将式(3)改写成最小二乘法模型为:
[0092][0093]
其中,上标t为转置,令式(4)中分别对参数m、参数r采用最小二乘法进行辨识,其辨识模型分别为:
[0094]
m(n)=m(n
‑
1) j1(n)[y1(n)
‑
φ
1t
(n)]m(n
‑
1)
ꢀꢀ
(5)
[0095][0096]
式(5)、(6)中:
[0097]
m(n)、r(n)分别为m、r在n时刻采样值;m(n
‑
1)、r(n
‑
1)分别为m、r在n
‑
1时刻采样值;
[0098]
y1(n)、y2(n)为输出矩阵,且y1(n)=i
1d
(n 1)、y2(n) i
1q
(n 1);
[0099]
φ1(n)为输入矩阵φ1在n时刻采样值,φ
1t
(n)=[i
1d
(n) i
1q
(n) u
1d
(n)]
t
;
[0100]
φ2(n)为输入矩阵φ2在n时刻采样值,
[0101]
j1(n)为矩阵j1在n时刻采样值,在n时刻采样值,其中k1(n)、k1(n
‑
1)分别为矩阵k1在n和n
‑
1时刻采样值,δ1为参数,0<δ1<1,i为单位矩阵;
[0102]
j2(n)为矩阵j2在n时刻采样值,在n时刻采样值,其中k2(n)、k2(n
‑
1)分别为矩阵k2在n和n
‑
1时刻采样值,δ2为参数,0<δ2<1,i为单位矩阵;
[0103]
依据式(5)对参数m进行估算,得到参数m的估算值为当获取参数m的估算值后,进一步推出与对应的转速估算值为:
[0104][0105]
依据式(6)对参数r进行估算,得到参数r的估算值为当获取参数r的估算值后,进一步推导出与对应的转速估算值为:
[0106][0107]
结合式(7)、(8)可知,首先分别获得参数估算值再经关系式分别计算得到各自对应的转速估算值为使转速估算值逼近实际值,提高转速的估计精度,对公式(7)、(8)下的转速估算值取平均值,即得到电机转速最终估算值为:
[0108][0109]
步骤2.2、步骤1中构造的坐标变换,其输出的u
1d
、u
1q
和i
1d
、i
1q
作为步骤2.1中无轴承同步磁阻电机的电机转速估算器的输入信号,步骤2.1中转速估算器输出信号为电机转速最终估算值经积分运算后得到转子位置角估算值作为坐标变换输入信号之一。
[0110]
步骤3具体如下:
[0111]
步骤3.1、建立虚拟控制器;
[0112]
对于无轴承同步磁阻电机,采用i
1d
控制时,i
1d
=不为零常数,电机的电磁转矩方程为:
[0113][0114]
式中,t
e
为电磁转矩,p1为转矩绕组极对数;
[0115]
将式(10)代入无轴承同步磁阻电机的运动方程,得到下式:
[0116][0117]
式中,n为转动惯量,b为摩擦系数,t
l
为负载转矩;
[0118]
假定电机转速参考值为ω
*
,电机转速参考值和转速实际值之间的偏差为e
ω
,即e
ω
=ω
*
‑
ω,对e
ω
求导,得到下式:
[0119][0120]
取参数则为使反推控制系统稳定,设计如下方程:
[0121][0122]
式中,参数λ>0;
[0123]
用电机转速最终估算值代替转速实际值ω,令转速参考值ω
*
和最终估算值之间的偏差为即用代替e
ω
,用励磁电流分量参考值代替实际值i
1d
,由式(13)计算出虚拟控制器的输出信号为:
[0124][0125]
步骤3.2、步骤3.1中建立的虚拟控制器输入信号之一为转速参考值ω
*
和最终估算值之间的偏差,输入信号之二为电机励磁电流分量参考值输入信号之三为电机转速最终估算值经虚拟控制器运算后输出
[0126]
进一步地,在步骤5中,建立广义spwm逆变器,图3是广义逆变器的原理框图。具体如下:
[0127]
步骤4中pi调节器输出的同步旋转d
‑
q坐标下两相电压参考值经park逆变换后输出两相静止坐标下电压参考值再经clark逆变换输出三相静止坐标下电压参考值压参考值作为spwm逆变器的输入信号,spwm逆变器向无轴承同步磁阻电机转矩绕组供电,实现电机转速的有效估算和转子稳定旋转。
[0128]
本发明提供的无轴承同步磁阻电机转速估算系统构造方法,能够准确估算电机转速,系统响应快速。无需安装传统机械式速度传感器,解决了速度传感器装配带来的控制系统成本增加、电机本体结构复杂等缺陷。
[0129]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。