技术特征:
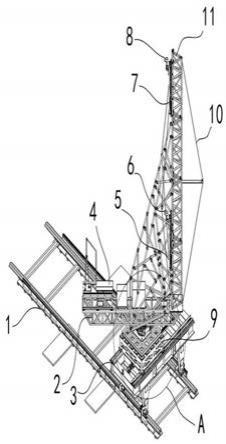
1.一种用于piv系统的四自由度移测装置,其特征在于,包括:z向运动机构,设于x向运动机构;x向运动机构,用于在x向做直线运动,设有用于z向运动机构在z向做直线运动的z向轨道;旋转机构,设于z向运动机构;以及支架,设于旋转机构;所述支架包括:第一支撑架,设有用于在y向直线运动的y向运动机构;y向运动机构,用于安装piv系统的piv相机;以及第二支撑架,用于安装piv系统的激光器,设于旋转机构,与第一支撑架固定连接以使旋转机构转动时激光器与piv相机在z向上的距离固定。2.如权利要求1所述用于piv系统的四自由度移测装置,其特征在于,所述x向和z向相互垂直,x向和z向位于同一水平面;所述y向垂直于所述水平面。3.如权利要求1所述用于piv系统的四自由度移测装置,其特征在于,所述第一支撑架为立架,所述立架设有多个y向运动机构;每个y向运动机构均设有piv系统的piv相机。4.如权利要求3所述用于piv系统的四自由度移测装置,其特征在于,所述y向运动机构的数量为2个,2个y向运动机构分别设于立架的上部和下部。5.如权利要求4所述用于piv系统的四自由度移测装置,其特征在于,所述y向运动机构为单轴机器人。6.如权利要求4所述用于piv系统的四自由度移测装置,其特征在于,所述旋转机构包括:转动平台,设于z向平台,通过转盘与第一伺服电机连接;所述x向运动机构包括:x向平台,与第二伺服电机连接;x向轨道,用于x向平台在x向做直线运动;所述y向运动机构包括:y向平台,与第三伺服电机连接;y向轨道,用于y向平台在y向做直线运动;所述z向运动机构包括:z向平台,与第四伺服电机连接;z向轨道,设于x向平台,用于z向平台在z向做直线运动。7.如权利要求6所述用于piv系统的四自由度移测装置,其特征在于,所述第二支撑架为横架,所述横架的一端与立架固定连接。8.一种权利要求6或7所述用于piv系统的四自由度移测装置的控制方法,其特征在于,包括:接收位移反馈信息并根据位移反馈信息生成指定速度运行指令;发送指定速度运行指令至伺服驱动器,以使伺服驱动器控制伺服电机按照指定速度运行。9.一种权利要求6或7所述用于piv系统的四自由度移测装置的控制系统,其特征在于,
包括:运动控制器,用于接收位移反馈信息并根据位移反馈信息生成指定速度运行指令;用于发送指定速度运行指令至伺服驱动器,以使伺服驱动器控制伺服电机按照指定速度运行。10.根据权利要求9所述用于piv系统的四自由度移测装置的控制系统,其特征在于,包括:所述运动控制器,用于通过第一伺服驱动器与第一伺服电机连接;用于通过第二伺服驱动器与第二伺服电机连接;用于通过第三伺服驱动器与第三伺服电机连接;用于通过第四伺服驱动器与第四伺服电机连接。
技术总结
为解决现有的航空声学风洞试验中存在的测量装置的位置转换效率低影响试验效率的技术问题,本发明实施例提供一种用于PIV系统的四自由度移测装置、控制系统及方法,包括:Z向运动机构,设于X向运动机构;X向运动机构,用于在X向做直线运动,设有用于Z向运动机构在Z向做直线运动的Z向轨道;旋转机构,设于Z向运动机构;以及支架,设于旋转机构;所述支架包括:第一支撑架,设有用于在Y向直线运动的Y向运动机构;Y向运动机构,用于安装PIV系统的PIV相机;以及第二支撑架,用于安装PIV系统的激光器,设于旋转机构,与第一支撑架固定连接以使旋转机构转动时激光器与PIV相机在Z向上的距离固定。本发明实施例提高了测量装置的位置转换效率。换效率。换效率。
技术研发人员:史喆羽 赵昱 张卫国 田昊 马帅
受保护的技术使用者:中国空气动力研究与发展中心低速空气动力研究所
技术研发日:2021.10.21
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。