技术特征:
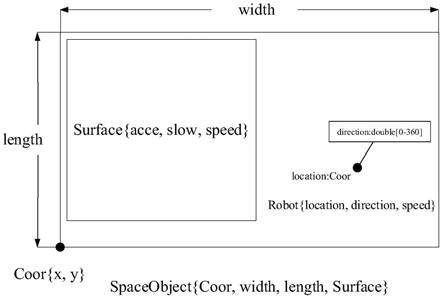
1.基于datalog规则的自适应无人小车仿真方法,其特征在于,包括如下步骤:(1)建立动态变化的自适应无人小车仿真场景,采用数字矩阵和datalog规则改进运行场景,实现场景的动态更新;(2)根据无人小车的状态以及环境参数的变化,构建运行逻辑的状态转化图,并使用datalog规则对运行逻辑进行等价翻译,对状态转化过程进行推理,实现自适应无人小车的运行逻辑。2.根据权利要求1所述基于datalog规则的自适应无人小车仿真方法,其特征在于,在步骤(1)中,建立动态变化的自适应无人小车仿真场景的方法如下:在仿真场景中对运行场景内的各元素进行分类建模,包括无人小车、不同路况的路面和障碍物;对于无人小车,使用坐标点表示其位置,同时设置一个方向参数表示其运行方向,路面的基本信息使用矩阵块对象进行表示,矩阵块对象中包含的路况信息属性用于表示不同类型的路况,从而建立以矩阵块为核心的仿真场景。3.根据权利要求2所述基于datalog规则的自适应无人小车仿真方法,其特征在于,在步骤(1)中,采用数字矩阵和datalog规则改进常规场景,实现场景动态更新的方法如下:对于代表不同路况的矩阵块对象,使用typecode属性表示当前矩阵块对象的路况信息编码,每一个编码唯一代表了一种特定的路面,在程序中使用该编码代替矩阵块对象,使用独立于程序外的矩阵文件对矩阵场景进行描述,文件首行给出场景横向与纵向的矩阵块个数,用于表示场景大小,从而将整个场景由若干复杂的矩阵块对象替换成一个数字矩阵;在解析矩阵时,使用datalog规则,每一个路况信息编码typecode都对应一条规则进行解析,规则置于统一的规则文件中,规则形式的解码公式如下:surface(code,acce,slow,speed):
‑
typecode(code),acce=a,slow=s,speed=sp其中,每一个路况信息编码code在匹配后都对应唯一的路况信息surface,acce、slow、speed分别表示路面的加速值、减速值和建议速度值,a、s、sp为对应的取值;解码过程为,在运行过程中,根据当前无人小车所处位置信息,读取当前位置的路况信息编码以及加减速和速度信息,以谓词的形式传递到规则系统中,根据给定的datalog规则推导出路况信息的谓词surface,并将结果返回给程序继续执行,实现对编码的解码。4.根据权利要求1所述基于datalog规则的自适应无人小车仿真方法,其特征在于,在步骤(2)中,根据无人小车的状态以及环境参数的变化,构建运行逻辑的状态转化图的方法如下:在给定场景中,确定无人小车的状态集合,状态间相互转化的条件为环境参数的变化,状态转化图中设置一个起点,对应无人小车初始化的状态,终点的集合有若干个,包含到达指定任务点的状态以及因障碍物停止的状态。5.根据权利要求1所述基于datalog规则的自适应无人小车仿真方法,其特征在于,在步骤(2)中,使用datalog规则对运行逻辑进行等价翻译,对状态转化过程进行推理,实现自适应无人小车的运行逻辑的方法如下:将无人小车在运行过程中的状态转化过程类比为“条件
‑
推理
‑
动作”的触发方式,采用datalog规则对条件语句进行等价翻译,等价翻译包括以下形式:(a)对于并列的if条件:
(b)对于嵌套的if条件:(c)对于else后引出的if条件:(d)对于if条件中的“或”关系:其中,c1、c2表示条件,act1、act2表示执行操作,“!”表示非运算,“|”表示或运算。
技术总结
本发明公开了基于Datalog规则的自适应无人小车仿真方法,建立动态变化的自适应无人小车仿真场景,采用数字矩阵和Datalog规则改进运行场景,实现场景的动态更新;根据无人小车的状态以及环境参数的变化,构建运行逻辑的状态转化图,并使用Datalog规则对运行逻辑进行等价翻译,对状态转化过程进行推理,实现自适应无人小车的运行逻辑。本发明将环境的动态变化以及运行逻辑的更新从系统代码中剥离抽取出来,使用独立的Datalog规则模块进行演绎推理,实现自适应的过程,大大降低了系统代码量,减小了系统代码的耦合性,使得自适应的运行逻辑更加高效简洁,避免了动态更新场景所带来的代码重写与重部署问题。代码重写与重部署问题。代码重写与重部署问题。
技术研发人员:秦小麟 李瑭 朱润泽 费珂 迟贺宇 黄昱洲
受保护的技术使用者:南京航空航天大学
技术研发日:2021.08.13
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。