1.本发明涉及计算机应用领域,尤其涉及一种农产品种植方法、装置、系统、设备及存储介质。
背景技术:
2.温室种植用保暖、加温、透光等设备(如冷床、温床、温室等)和相应的技术措施,保护植物御寒、过冬或促使生长和提前开花结果等。
3.然而,如何实现温室种植的各类设备的自动控制,以促进和提高作物的种植成果和种植效率,是本领域技术人员亟待解决的技术问题。
技术实现要素:
4.本发明为了克服上述相关技术存在的缺陷,提供一种农产品种植方法、装置、系统、设备及存储介质,以实现温室种植的各类设备的自动控制,从而促进和提高作物的种植成果和种植效率。
5.根据本发明的一个方面,提供一种农产品种植方法,应用于温室,包括:
6.接收温室外部环境传感器模块感测的第一环境参数;
7.接收温室内部环境传感器模块感测的第二环境参数;
8.接收水肥参数传感器模块感测的水肥参数;
9.根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,所述环境参数调节单元包括:联通所述温室的外侧和内侧的第一通风单元、使所述温室的内侧形成内循环通风的第二通风单元、设置于所述温室的内侧的喷淋单元、遮光单元以及补光单元,所述水肥控制单元包括施肥单元以及回液单元,所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路,所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端,所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐;
10.利用所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
11.在本发明的一些实施例中,所述根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数包括:
12.将所述第一环境参数、所述第二环境参数以及水肥参数输入经训练的控制参数决策模型;
13.获取所述控制参数决策模型的输出作为所述环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,
14.其中,所述控制参数决策模型经由仿真模拟训练。
15.在本发明的一些实施例中,所述控制参数决策模型通过如下步骤进行仿真模拟训
练:
16.获取农产品的历史种植数据,所述历史种植数据包括历史环境参数、历史水肥参数以及种植作物特征;
17.基于所述历史种植数据,模拟用于种植作物的温室环境参数、水肥参数,并生成仿真温室,所述温室环境参数包括所述第一环境参数和/或所述第二环境参数,所述仿真温室包括仿真环境参数调节单元以及仿真水肥控制单元;
18.基于所述温室环境参数、水肥参数采用不同的决策模型获取所决策的控制参数;
19.利用所述控制参数对所述仿真温室的仿真环境参数调节单元以及仿真水肥控制单元进行模拟控制,获取设定时间段内的作物种植状态数据;
20.根据所获取的作物种植状态数据确定一最优决策模型作为所述控制参数决策模型。
21.在本发明的一些实施例中,所述利用所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元之后,还包括:
22.接收更新的第一环境参数、第二环境参数以及水肥参数;
23.将更新的第一环境参数、第二环境参数以及水肥参数,输入经训练的控制参数决策模型;
24.获取所述控制参数决策模型的输出作为环境参数调节单元的一个或多个单元以及水肥控制单元的更新的控制参数;
25.利用更新的所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
26.在本发明的一些实施例中,还包括:
27.接收视频传感器模块的视频数据;
28.根据所述视频数据获取种植作物状态数据;
29.根据所述种植作物状态数据调整所述控制参数。
30.在本发明的一些实施例中,所述根据所述种植作物状态数据调整所述控制参数包括:
31.判断根据所述视频数据获取的种植作物状态数据与所述控制参数决策模型预测的种植作物状态数据是否一致;
32.若否,则根据所述种植作物状态数据调整所述控制参数;
33.根据所述视频数据获取的种植作物状态数据,修正所述控制参数决策模型。
34.在本发明的一些实施例中,所述控制参数决策模型包括多个子控制参数决策模型,每一子控制参数决策模型输出所述环境参数调节单元以及水肥控制单元中的一个单元的控制参数。
35.在本发明的一些实施例中,所述第一环境参数包括所述温室外侧的温度、湿度、光照强度、风速、降雨量中的一项或多项。
36.在本发明的一些实施例中,所述温室内部环境传感器模块包括二氧化碳传感器、温度传感器、湿度传感器、光合有效辐射传感器中的一个或多个传感器。
37.在本发明的一些实施例中,水肥参数传感器模块包括:
38.第一传感器模块,包括设置于所述温室的基质槽的酸碱度传感器、水溶盐含量传
感器、含水量传感器、温度传感器中的一个或多个传感器;
39.第二传感器模块,包括设置于水肥设备处的酸碱度传感器、水溶盐含量传感器、温度传感器中的一个或多个传感器。
40.根据本发明的又一方面,还提供一种农产品种植装置,包括:
41.第一接收模块,配置成接收温室外部环境传感器模块的第一环境参数;
42.第二接收模块,配置成接收温室内部环境传感器模块的第二环境参数;
43.第三接收模块,配置成接收水肥参数传感器模块的水肥参数;
44.参数确定模块,配置成根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,所述环境参数调节单元包括:联通所述温室的外侧和内侧的第一通风单元、使所述温室的内侧形成内循环通风的第二通风单元,设置于所述温室的内侧的喷淋单元、遮光单元以及补光单元,所述水肥控制单元,包括施肥单元以及回液单元,所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路,所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端,所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐;
45.参数控制模块,配置成利用所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
46.根据本发明的又一方面,还提供一种农产品种植系统,包括:
47.温室;
48.温室外部环境传感器模块,安装于温室外侧;
49.温室内部环境传感器模块,安装于温室的容置空间内;
50.水肥参数传感器模块;
51.环境参数调节单元,包括:
52.第一通风单元,设置于所述温室,并联通所述温室外侧和温室的容置空间;
53.第二通风单元,设置于所述温室的容置空间内,使所述温室的容置空间内形成内循环通风;
54.喷淋单元,设置于所述温室的容置空间内;
55.遮光单元,设置于所述温室的容置空间内;
56.补光单元,设置于所述温室的容置空间内;
57.水肥控制单元,包括施肥单元以及回液单元,所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路,所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端,所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐;
58.农产品种植控制模块,配置成执行如上所述的农产品种植方法。
59.根据本发明的又一方面,还提供一种电子设备,所述电子设备包括:处理器;存储介质,其上存储有计算机程序,所述计算机程序被所述处理器运行时执行如上所述的步骤。
60.根据本发明的又一方面,还提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上所述的步骤。
61.相比现有技术,本发明的优势在于:
62.通过温室外部环境传感器模块感测的第一环境参数、温室内部环境传感器模块感测的第二环境参数以及水肥参数传感器模块感测的水肥参数,从而确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,由此,实现温室种植在温湿度、光合反应以及水肥控制,由此,实现温室种植的各类设备的自动控制,促进和提高作物的种植成果和种植效率。
附图说明
63.通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得更加明显。
64.图1示出了根据本发明实施例的农产品种植方法的流程图。
65.图2示出了根据本发明实施例的根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数的流程图。
66.图3示出了根据本发明实施例的控制参数决策模型仿真模拟训练的流程图。
67.图4示出了根据本发明实施例的更新控制参数的流程图。
68.图5示出了根据本发明实施例的根据视频数据调整控制参数的流程图。
69.图6示出了根据本发明实施例的根据所述种植作物状态数据调整所述控制参数的流程图。
70.图7示出了根据本发明实施例的农产品种植装置的模块图。
71.图8示出了根据本发明实施例的农产品种植系统的模块图。
72.图9为本发明实施例公开的一种温室的主视图。
73.图10为本发明实施例公开的一种温室的侧视图。
74.图11为本发明实施例公开的一种温室的俯视图。
75.图12为本发明实施例公开的设置幕布单元的示意图。
76.图13为本发明实施例公开的一种水肥控制单元的结构示意图。
77.图14为本发明实施例公开的施肥管路的示意图。
78.图15示意性示出本发明示例性实施例中一种计算机可读存储介质示意图。
79.图16示意性示出本发明示例性实施例中一种电子设备示意图。
具体实施方式
80.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。
81.此外,附图仅为本发明的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处
理器装置和/或微控制器装置中实现这些功能实体。
82.附图中所示的流程图仅是示例性说明,不是必须包括所有的步骤。例如,有的步骤还可以分解,而有的步骤可以合并或部分合并,因此,实际执行的顺序有可能根据实际情况改变。
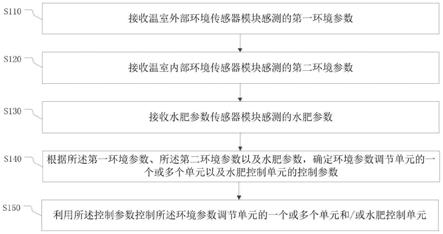
83.图1示出了根据本发明实施例的农产品种植方法的流程图。农产品种植方法包括如下步骤:
84.步骤s110:接收温室外部环境传感器模块感测的第一环境参数。
85.具体而言,所述第一环境参数可以包括所述温室外侧的温度、湿度、光照强度、风速、降雨量中的一项或多项。温室外部环境传感器模块可以设置在温室外部的任意位置。本发明并不以温室外部环境传感器模块的硬件传感器为限制。
86.在一些实施例中,当设置多个温室时,可以为每个温室设置温室外部环境传感器模块。在一些变化例中,也可以使多个温室共享温室外部环境传感器模块。在一些实施例中,第一环境参数可以全部由温室外部环境传感器模块获取。在一些变化例中,第一环境参数也可以部分由温室外部环境传感器模块获取,部分由第三方服务器获取。
87.步骤s120:接收温室内部环境传感器模块感测的第二环境参数。
88.具体而言,所述温室内部环境传感器模块包括二氧化碳传感器、温度传感器、湿度传感器、光合有效辐射传感器中的一个或多个传感器。由此,可以通过温室内部环境传感器模块感测温室内的温度、湿度、植物实际接收到的太阳辐射中对植物光合作用有效的光谱成分(波长范围例如为380~710纳米)等。在一些实施例中,当设置多个温室时,可以为每个温室设置温室内部环境传感器模块。
89.步骤s130:接收水肥参数传感器模块感测的水肥参数。
90.具体而言,水肥参数传感器模块可以包括第一传感器模块和第二传感器模块。第一传感器模块可以包括设置于所述温室的基质槽的酸碱度传感器、水溶盐含量传感器、含水量传感器、温度传感器中的一个或多个传感器。第二传感器模块可以包括设置于水肥设备处的酸碱度传感器、水溶盐含量传感器、温度传感器中的一个或多个传感器。由此,可以对基质槽的基质参数和水肥设备处的肥料参数进行感测。
91.步骤s140:根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数。
92.所述环境参数调节单元可以包括联通所述温室的外侧和内侧的第一通风单元、使所述温室的内侧形成内循环通风的第二通风单元、设置于所述温室的内侧的喷淋单元、遮光单元以及补光单元。
93.具体而言,第一通风单元设置于所述温室,并可以联通所述温室的外侧和温室的容置空间,从而实现温室内外的通风。第一通风单元例如可以是设置在温室的开窗,由此,控制参数可以控制第一通风单元的开窗程度(诸如开窗角度、开窗面积等),以实现温室内的温湿度控制。
94.具体而言,第二通风单元设置于所述温室内,以使所述温室内形成内循环通风。第二通风单元例如可以是风机或者其它能够形成气流的设备。由此,控制参数可以控制风机的转速、风速、风量、朝向、持续时间等,以实现温室内的温湿度控制。
95.具体而言,喷淋单元设置于所述温室内。优选地,喷淋单元可以设置于温室的顶
部,并朝向温室的基质槽喷淋雾状液体。喷淋单元可以设置多个喷淋头,并可按需分布在温室内。由此,控制参数可以控制喷淋单元的喷雾状态、持续时间、喷雾范围等,以实现温室内的湿度控制。
96.具体而言,补光单元设置于所述温室内。补光单元可以用于控制温室内的光合辐射。补光单元可以包括多个led补光灯,多个led补光灯可以按需分布在温室内部,由此,控制参数可以控制led补光灯的开启与否、开启亮度、波长范围、开启时间等,以实现温室内的光合辐射控制。
97.具体而言,幕布单元设置于所述温室内。幕布单元可以用于遮阳、夜间保温。由此,控制参数可以控制幕布单元的覆盖面积、遮盖面积、遮盖时间等,以实现温室内的保温控制以及光合辐射控制。此外,幕布单元可以避免温室之间的补光单元的相互影响。
98.所述水肥控制单元可以包括施肥单元以及回液单元。所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路。所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端。所述施肥管路用于联通至温室以对基质槽进行施肥。所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐。由此,控制参数可以控制储水桶和施肥桶的进水和进肥比例、灌溉时间、灌溉量等。
99.步骤s150:利用所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
100.具体而言,在一些实施例中,步骤s150可以通过环境控制软件机型控制。在一些变化例中,也可以由用户对步骤s150的实现进行自定义程序设置。在一些实施例中,还可以由用户按需设置其它传感器,本发明并非以此为限制。进一步地,所述种植系统可以使用环境控制软件,例如荷兰骑士公司的cx500系统,能够帮助参赛者实现实时监测调控多项指标和多种传感器,也可以进行自定义程序设置,作为即时反馈和精确自动化控制;该环境控制系统可以通过远程synoptaultimate远程操控。
101.在进一步的实施例中,所述环境参数调节单元的一个或多个单元和/或水肥控制单元的状态参数,也可以一并作为控制参数的决策依据。
102.例如,所述第一环境参数、所述第二环境参数、水肥参数以及状态参数可以读取的参数包括:室外温度(摄氏度);风速(米/秒);风向;辐射强度(瓦特/平方米);辐射总量(焦耳/平方厘米);雨图标;气温(摄氏度);湿球温度(摄氏度);露点温度(摄氏度);相对湿度(百分比);二氧化碳浓度(百万分比浓度);光合作用有效辐射平均值;光合作用有效辐射总量(毫摩尔/平方米);计算的喷雾持续时间(秒);喷雾组状态;开启风扇所需达到的最低气温(摄氏度);开启风扇所需达到的最小相对湿度(百分比);通风设定点(摄氏度);最小窗位置背风面(百分比);最大窗位置背风面(百分比);用于p
‑
波段的最小温度差异(摄氏度);在最小温度差异的p
‑
波段(摄氏度);用于p
‑
波段的最大温度差(摄氏度);在最大温度差异的p
‑
波段(摄氏度);相对湿度设定点(百分比);用于关闭幕布到位置1的最小辐射强度(瓦特/平方米);用于开启幕布位置1的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置2的最小辐射强度(瓦特/平方米);用于开启幕布位置2的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置3的最小辐射强度(瓦特/平方米);用于开启幕布位置3的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置4的最小辐射强度(瓦特/平方米);用于
开启幕布位置4的最小辐射强度减少量(瓦特/平方米);幕布位置1(百分比);幕布位置2(百分比);幕布位置3(百分比);幕布位置4(百分比);配方1的灌溉持续时间(秒);配方1的导电率(毫西门子/厘米);配方1的ph值;用于启动灌溉组的最小辐射总量(焦耳/平方厘米);最长暂停时间(分钟);基质槽含水量(百分比);基质槽的导电率(毫西门子/厘米);基质槽的温度(摄氏度)。
103.控制参数可以包括:开启风扇所需达到的最低气温(摄氏度);开启风扇所需达到的最小相对湿度(百分比);通风设定点(摄氏度);最小窗位置背风面(百分比);最大窗位置背风面(百分比);用于p
‑
波段的最小温度差异(摄氏度);在最小温度差异的p
‑
波段(摄氏度);用于p
‑
波段的最大温度差(摄氏度);在最大温度差异的p
‑
波段(摄氏度);相对湿度设定点(百分比);用于关闭幕布到位置1的最小辐射强度(瓦特/平方米);用于开启幕布位置1的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置2的最小辐射强度(瓦特/平方米);用于开启幕布位置2的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置3的最小辐射强度(瓦特/平方米);用于开启幕布位置3的最小辐射强度减少量(瓦特/平方米);用于关闭幕布到位置4的最小辐射强度(瓦特/平方米);用于开启幕布位置4的最小辐射强度减少量(瓦特/平方米);幕布位置1(百分比);幕布位置2(百分比);幕布位置3(百分比);幕布位置4(百分比);配方1的灌溉持续时间(秒);配方1的导电率(毫西门子/厘米);配方1的ph值;用于启动灌溉组的最小辐射总量(焦耳/平方厘米);最长暂停时间(分钟);基质槽含水量(百分比);基质槽的导电率(毫西门子/厘米);基质槽的温度(摄氏度)。
104.以上仅仅是示意性地示出本技术中的参数内容,本发明并非以此为限制。
105.在本发明提供的农产品种植方法中,通过温室外部环境传感器模块感测的第一环境参数、温室内部环境传感器模块感测的第二环境参数以及水肥参数传感器模块感测的水肥参数,从而确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,由此,实现温室种植在温湿度、光合反应以及水肥控制,由此,实现温室种植的各类设备的自动控制,促进和提高作物的种植成果和种植效率。
106.图2示出了根据本发明实施例的根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数的流程图。图2共示出如下步骤:
107.步骤s141:将所述第一环境参数、所述第二环境参数以及水肥参数输入经训练的控制参数决策模型。
108.具体而言,所述控制参数决策模型经由仿真模拟训练。控制参数决策模型的仿真模拟训练将结合图3进行具体描述,在此不予赘述。
109.步骤s142:获取所述控制参数决策模型的输出作为所述环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数。
110.具体而言,所述控制参数决策模型包括多个子控制参数决策模型,每一子控制参数决策模型输出所述环境参数调节单元以及水肥控制单元中的一个单元的控制参数。由此,可以使得各个控制参数独立决策,避免过多控制参数的决策导致决策模型结构复杂,从而影响决策模型求解最优控制参数组的过程,降低决策效率。在一些变化例中,也可以使得一个控制参数决策模型决策获得多个控制参数,由此,可以减少内存中储存的决策模型的数量,以便于系统能够有足够的余力执行其它的控制任务。
111.由此,通过仿真模拟训练获得的控制参数决策模型,以根据实时获得的所述第一环境参数、所述第二环境参数以及水肥参数自动进行控制参数的智能决策,以便于进一步促进和提高作物的种植成果和种植效率。
112.图3示出了根据本发明实施例的控制参数决策模型仿真模拟训练的流程图。图3共示出如下步骤:
113.步骤s101:获取农产品的历史种植数据,所述历史种植数据包括历史环境参数、历史水肥参数以及种植作物特征。
114.具体而言,历史环境参数例如可以包括第一环境参数和所述第二环境参数。种植作物特征例如可以包括种植物在各个历史环境参数、历史水肥参数下的种植状态、产量等。
115.步骤s102:基于所述历史种植数据,模拟用于种植作物的温室环境参数、水肥参数,并生成仿真温室。
116.所述温室环境参数可以包括所述第一环境参数和/或所述第二环境参数,所述仿真温室包括仿真环境参数调节单元以及仿真水肥控制单元。
117.由此,可以通过历史环境参数、历史水肥参数、种植作物特征实现温室种植过程的仿真。
118.步骤s103:基于所述温室环境参数、水肥参数采用不同的决策模型获取所决策的控制参数。
119.具体而言,决策模型例如可以是机器学习模型或者是自定义设置的决策模型,本发明并非以此为限制。步骤s103相当于通过多个决策模型获得多套不同的控制参数。
120.步骤s104:利用所述控制参数对所述仿真温室的仿真环境参数调节单元以及仿真水肥控制单元进行模拟控制,获取设定时间段内的作物种植状态数据。
121.步骤s105:根据所获取的作物种植状态数据确定一最优决策模型作为所述控制参数决策模型。
122.具体而言,步骤s104和步骤s105,通过多个决策模型获得的多套不同的控制参数,对仿真温室的仿真环境参数调节单元以及仿真水肥控制单元进行模拟控制,从而可以选取作物种植状态数据最优的决策模型,作为控制参数决策模型。
123.进一步地,上述步骤s103至步骤s105可以基于不同的温室环境参数、水肥参数迭代执行,从而能够获得在不同的温室环境参数、水肥参数中,都能过获得较优的作物种植状态数据的决策模型,作为控制参数决策模型。
124.由此,通过上述步骤s101至步骤s105可以优化决策模型,以在实际种植中,能够获得最优的控制参数。
125.图4示出了根据本发明实施例的更新控制参数的流程图。图4共示出如下步骤:
126.步骤s161:接收更新的第一环境参数、第二环境参数以及水肥参数。
127.步骤s162:将更新的第一环境参数、第二环境参数以及水肥参数,输入经训练的控制参数决策模型。
128.步骤s163:获取所述控制参数决策模型的输出作为环境参数调节单元的一个或多个单元以及水肥控制单元的更新的控制参数。
129.步骤s164:利用更新的所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
130.上述步骤s161至步骤s164的执行可以与步骤s110至步骤s150的执行过程类型。在一些变化例中,还可以将步骤s140确定的控制参数,也作为控制参数决策模型的输入,以能够霍尔更优化的更新的控制参数。
131.具体而言,考虑到农作物种植通常会历经较长的时间,从而上述第一环境参数、第二环境参数以及水肥参数经常会发生变化。因此,可以通过上述步骤s161至步骤s164实现控制参数的更新,以适用于农作物的长时间种植。
132.图5示出了根据本发明实施例的根据视频数据调整控制参数的流程图。
133.步骤s171:接收视频传感器模块的视频数据。
134.具体而言,视频传感器模块例如可以布置在温室内。视频传感器模块包括可以包括至少一个摄像头。当视频传感器模块多个多个摄像头时,可以按需布置在温室内。摄像头例如可以是全景球机,本技术并非以此为限制。
135.步骤s172:根据所述视频数据获取种植作物状态数据。
136.在一些实施例中,可以人工查看视频数据,并进行种植作物状态数据的确定和输入。在另一些实施例中,也可以通过图像算法(诸如卷积神经网络)等,识别视频数据的种植作物状态数据。
137.步骤s173:根据所述种植作物状态数据调整所述控制参数。
138.在一些实施例中,可以由人工根据所述种植作物状态数据对前述步骤获得的控制参数进行调整。在一些变化例中,也可以由系统自动执行控制参数的调整。
139.图6示出了根据本发明实施例的根据所述种植作物状态数据调整所述控制参数的流程图。图6共示出如下步骤:
140.步骤s1731:判断根据所述视频数据获取的种植作物状态数据与所述控制参数决策模型预测的种植作物状态数据是否一致。
141.具体而言,控制参数决策模型在仿真训练时,因为需要通过预测的种植作物状态数据的进行决策模型的选择,因此,在本实施例中,可以将控制参数决策模型对应预测的种植作物状态数据进行储存,从而步骤s1731可以根据所储存的内容获取到控制参数决策模型对应预测的种植作物状态数据。
142.进一步地,在一些实施例中,步骤s1731判断是否一致时,可以进行严格的判断,也就是需要所述视频数据获取的种植作物状态数据与所述控制参数决策模型预测的种植作物状态数据完全一致。在一些变化例中,也可以向步骤s1731的判断提供一些浮动的空间。例如,可以根据所述控制参数决策模型预测的种植作物状态数据获得一种植作物状态数据范围,当根据所述视频数据获取的种植作物状态数据落入所述控制参数决策模型预测的种植作物状态数据范围时,判断所述视频数据获取的种植作物状态数据与所述控制参数决策模型预测的种植作物状态数据一致。本技术并非以此为限制。
143.若步骤s1731判断为否,则执行步骤s1732:根据所述种植作物状态数据调整所述控制参数。
144.在一些实施例中,可以由人工根据所述种植作物状态数据对前述步骤获得的控制参数进行调整。在一些变化例中,也可以由系统自动执行控制参数的调整。
145.步骤s1733:根据所述视频数据获取的种植作物状态数据,修正所述控制参数决策模型。
146.具体而言,步骤s1733可以将根据所述视频数据获取的种植作物状态数据作为历史种植数据,迭代执行步骤s101至步骤s105,以对控制参数决策模型进行修正。
147.以上仅仅是本发明的农产品种植方法的多个具体实现方式,各实现方式可以独立或组合来实现,本发明并非以此为限制。进一步地,本发明的流程图仅仅是示意性地,各步骤之间的执行顺序并非以此为限制,步骤的拆分、合并、顺序交换、其它同步或异步执行的方式皆在本发明的保护范围之内。
148.下面参见图7,图7示出了根据本发明实施例的农产品种植装置的模块图。农产品种植装置300包括第一接收模块310、第二接收模块320、第三接收模块330、参数确定模块340以及参数控制模块350。
149.第一接收模块310配置成接收温室外部环境传感器模块的第一环境参数。第二接收模块320配置成接收温室内部环境传感器模块的第二环境参数。第三接收模块330配置成接收水肥参数传感器模块的水肥参数。参数确定模块340配置成根据所述第一环境参数、所述第二环境参数以及水肥参数,确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,所述环境参数调节单元包括:联通所述温室的外侧和内侧的第一通风单元、使所述温室的内侧形成内循环通风的第二通风单元,设置于所述温室的内侧的喷淋单元、遮光单元以及补光单元,所述水肥控制单元,包括施肥单元以及回液单元,所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路,所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端,所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐。参数控制模块350配置成利用所述控制参数控制所述环境参数调节单元的一个或多个单元和/或水肥控制单元。
150.图7仅仅是示意性的示出本发明提供的农产品种植装置300,在不违背本发明构思的前提下,模块的拆分、合并、增加都在本发明的保护范围之内。本发明提供的农产品种植装置300可以由软件、硬件、固件、插件及他们之间的任意组合来实现,本发明并非以此为限。
151.在本发明的示例性实施方式的农产品种植装置中,通过温室外部环境传感器模块感测的第一环境参数、温室内部环境传感器模块感测的第二环境参数以及水肥参数传感器模块感测的水肥参数,从而确定环境参数调节单元的一个或多个单元以及水肥控制单元的控制参数,由此,实现温室种植在温湿度、光合反应以及水肥控制,由此,实现温室种植的各类设备的自动控制,促进和提高作物的种植成果和种植效率。
152.图8示出了根据本发明实施例的农产品种植系统的模块图。农产品种植系统400包括温室100、温室外部环境传感器模块420、温室内部环境传感器模块120、环境参数调节单元110、水肥参数传感器模块、水肥控制单元200以及农产品种植控制模块410。
153.温室外部环境传感器模块220安装于温室100的外侧,用于感测温室外部的环境参数。温室外部环境传感器模块220可以感测外界环境温度、湿度、光照强度、风速、降雨等。
154.温室内部环境传感器模块120安装于温室100的容置空间内。温室内部环境传感器模块120例如可以包括二氧化碳浓度传感器、温度传感器、湿度传感器、光合有效辐射传感器等。光合有效辐射传感器可以用于精准测量植物实际接收到的太阳辐射中对植物光合作用有效的光谱成分(波长范围例如为380~710纳米)。进一步地,温室内部环境传感器模块
120的位置可以按需设置。
155.水肥参数传感器模块可以包括第一传感器模块和第二传感器模块。第一传感器模块可以包括设置于所述温室的基质槽的酸碱度传感器、水溶盐含量传感器、含水量传感器、温度传感器中的一个或多个传感器。第二传感器模块可以包括设置于水肥设备处的酸碱度传感器、水溶盐含量传感器、温度传感器中的一个或多个传感器。由此,可以对基质槽的基质参数和水肥设备处的肥料参数进行感测。
156.环境参数调节单元110包括第一通风单元111、第二通风单元112、喷淋单元113、幕布单元114以及补光单元115。第一通风单元111设置于所述温室100,并联通所述温室100的外侧和温室100的内侧,从而实现温室内外的通风。第二通风单元112设置于所述温室100的容置空间内,使所述温室100的容置空间内形成内循环通风。第一通风单元111和第二通风单元112可以用以降低温室100内的湿度和温度。喷淋单元113设置于所述温室100的容置空间内。喷淋单元113可以增加温室100内的湿度。幕布单元114设置于所述温室100的容置空间内。幕布单元114可以用于遮阳、夜间保温。补光单元115设置于所述温室100的容置空间内。补光单元115用于控制温室100内的光合辐射。补光单元115可以包括多个led补光灯,多个led补光灯可以按需分布在温室100内部,本发明并非以此为限制。在多个温室100的实施例中,幕布单元114可以避免温室100之间的补光单元115的相互影响。
157.水肥控制单元200可以包括施肥单元以及回液单元,所述施肥单元包括储水桶、施肥桶、施肥机以及施肥管路,所述储水桶连接于所述施肥机的进水口,所述施肥桶连接于所述施肥机的进肥口,所述施肥机的施肥口连接于所述施肥管路的一端,所述回液单元包括过滤设备以及回液罐,所述过滤设备的进口连接于所述施肥管路,所述过滤设备的出口连接于所述回液罐。
158.农产品种植控制模块410配置成执行如上所述的农产品种植方法。农产品种植方法在此不予赘述。
159.所述系统还可以包括光谱成像仪,通过该设备来获取各类植被指数,如rvi、ndvi、evi等,通过检测绿色植被冠层,量化当前植物冠层的光合能力,同时观察到胁迫因素和环境条件对植被状态的长期影响,以待后续分析原因。光谱成像仪的型号可以是wrris pro,高精度红包热成像系统。
160.下面结合图9至图12描述本发明提供的温室及设置在温室的环境参数调节单元110的一个具体实施例。图9为本发明实施例公开的一种温室的主视图。图10为本发明实施例公开的一种温室的侧视图。图11为本发明实施例公开的一种温室的俯视图。图12为本发明实施例公开的设置幕布单元的示意图。
161.温室100包括支撑墙体、顶部单元130、多个基质槽。支撑墙体包括多个相互连接的侧壁。例如,支撑墙体可以包括相对设置的第一侧壁141和相对设置的第二侧壁142。每个第一侧壁141连接两个第二侧壁142。由此,支撑墙体的第一侧壁141和第二侧壁142可以连接形成中空的长方体的四个侧壁。顶部单元130连接于所述支撑墙体,并与所述支撑墙体形成容置空间。多个基质槽位于所述容置空间内,用于种植农产品。
162.具体而言,所述第一通风单元111包括顶部开窗111a、第一侧壁开窗111b以及第二侧壁开窗111c。
163.顶部开窗111a(如图9)设置于所述温室顶部单元130。所述顶部开窗111a与所述温
室的顶侧面134的角度由所述农产品种植控制模块的控制参数控制。如图3所示,所述温室包括四个顶侧面134,其中,两个顶侧面134为一组,形成角形顶部。顶部开窗111a可以分别连接在每个顶侧面134,或者仅设置在其中部分顶侧面134。农产品种植控制模块控制顶部开窗111a与其所连接的顶侧面134之间的角度。
164.第一侧壁开窗111b(如图10)设置于所述温室100的第一侧壁141,所述第一侧壁开窗111b与所述温室100的第一侧壁141的角度由所述控农产品种植控制模块的控制参数控制,所述第一侧壁开窗111b的转轴平行于所述顶部开窗111a的转轴。具体而言,第一侧壁开窗111b绕第一侧壁开窗111b上边(旋转轴)沿朝向温室100的外侧/内侧旋转。
165.第二侧壁开窗111c(如图9)设置于所述温室100的第二侧壁142,所述第二侧壁开窗111c与所述温室100的第二侧壁142的角度由所述农产品种植控制模块的控制参数控制,所述第二侧壁开窗111c的转轴垂直于所述顶部开窗111a的转轴。具体而言,第二侧壁开窗111c绕第二侧壁开窗111c上边(旋转轴)沿朝向温室100的外侧/内侧旋转。
166.具体而言,所述第二通风单元112可以包括两个风机1121(如图11)。所述两个风机1121的送风方向相对,且所述两个风机1121在垂直于送风方向的方向上相互避让设置,从而可以形成内循环通风。所述两个风机1121的送风强度由所述农产品种植控制模块的控制参数控制。
167.具体而言,所述喷淋单元113可以包括多个喷淋口1131。多个喷淋口1131可以连接于所述温室100的顶部单元130。所述多个喷淋口1131朝向所述温室110的容置空间内喷淋雾状液体。喷淋口1131可以按需分布在温室100的顶部单元130的顶部单元130。所述多个喷淋口1131的雾状液体的喷淋时间和/或喷淋量由所述农产品种植控制模块的控制参数控制。
168.具体而言,所述幕布单元114(如图12)包括固定单元114b、滑轮单元114a以及幕布114c。固定单元114b连接于所述温室100的顶部单元130。滑轮单元114a连接于所述温室100的顶部单元130。所述幕布114c的一侧连接于所述固定单元114b,所述幕布114c的另一侧连接于所述滑轮单元114a,所述滑轮单元114a由所述农产品种植控制模块的控制参数控制朝向或者背离所述固定单元114b滑动,以使所述幕布114c展开或折叠。本实施例可以提供多个幕布单元114,本发明并非以此为限制。在一些变化例中,幕布单元114还可以设置在温室100的支撑墙体,以对侧向的光源进行遮盖。
169.以上仅仅是示意性地描述本发明提供的温室及设置在温室的部分环境参数调节单元,本发明并非以此为限制。
170.下面结合图13和图14描述本发明提供的水肥控制单元。图13为本发明实施例公开的一种水肥控制单元的结构示意图。图14为本发明实施例公开的施肥管路的示意图。
171.水肥控制单元可以为水肥设备房200。水肥设备房200包括支撑墙体230以及顶部单元。支撑墙体230包括多个相互连接的外侧壁231
‑
234以及间隔侧壁235。顶部单元250连接于所述支撑墙体230并与所述支撑墙体230形成至少一个第一水肥设备隔间210以及第二水肥设备隔间220。所述第一水肥设备隔间210包括储水桶211、施肥桶213以及施肥机212。所述储水桶211连接于所述施肥机212的进水口,所述施肥桶213连接于所述施肥机212的进肥口,所述施肥机212的施肥口连接于施肥管路。所述施肥管路连接于所述顶部单元和所述外侧壁230之间。所述施肥管路包括多个水槽261,多个所述水槽261在同一水肥设备隔间平
行设置,且在相邻水肥设备隔间交错设置。由此,施肥机212可以通过进水口连接储水桶211、进肥口连接于施肥桶213以实现水肥混合,并将水肥混合物通过施肥管路260的多个水槽261输送至温室中。在一些实施例中,温室中也可以设置有类似的水槽,并与水槽261联通,从而实现水肥灌溉。所述第二水肥设备隔间220包括过滤设备222以及连接于过滤设备222的回液罐221。过滤设备222例如可以是反渗透过滤设备,本发明并非以此为限制。
172.以上仅仅是示意性地描述本发明提供的水肥控制单元,本发明并非以此为限制。
173.在本发明的示例性实施例中,还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被例如处理器执行时可以实现上述任意一个实施例中所述农产品种植方法的步骤。在一些可能的实施方式中,本发明的各个方面还可以实现为一种程序产品的形式,其包括程序代码,当所述程序产品在终端设备上运行时,所述程序代码用于使所述终端设备执行本说明书上述所述农产品种植方法部分中描述的根据本发明各种示例性实施方式的步骤。
174.参考图15所示,描述了根据本发明的实施方式的用于实现上述方法的程序产品700,其可以采用便携式紧凑盘只读存储器(cd
‑
rom)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
175.所述程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd
‑
rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。
176.所述计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等等,或者上述的任意合适的组合。
177.可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,所述程序设计语言包括面向对象的程序设计语言—诸如java、c 等,还包括常规的过程式程序设计语言—诸如“c”语言或类似的程序设计语言。程序代码可以完全地在租户计算设备上执行、部分地在租户设备上执行、作为一个独立的软件包执行、部分在租户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到租户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。
178.在本发明的示例性实施例中,还提供一种电子设备,该电子设备可以包括处理器,以及用于存储所述处理器的可执行指令的存储器。其中,所述处理器配置为经由执行所述
可执行指令来执行上述任意一个实施例中所述农产品种植方法的步骤。
179.所属技术领域的技术人员能够理解,本发明的各个方面可以实现为系统、方法或程序产品。因此,本发明的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。
180.下面参照图16来描述根据本发明的这种实施方式的电子设备500。图16显示的电子设备500仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。
181.如图16所示,电子设备500以通用计算设备的形式表现。电子设备500的组件可以包括但不限于:至少一个处理单元510、至少一个存储单元520、连接不同系统组件(包括存储单元520和处理单元510)的总线530、显示单元540等。
182.其中,所述存储单元存储有程序代码,所述程序代码可以被所述处理单元510执行,使得所述处理单元510执行本说明书上述所述农产品种植方法部分中描述的根据本发明各种示例性实施方式的步骤。例如,所述处理单元510可以执行如图1所示的步骤。
183.所述存储单元520可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(ram)5201和/或高速缓存存储单元5202,还可以进一步包括只读存储单元(rom)5203。
184.所述存储单元520还可以包括具有一组(至少一个)程序模块5205的程序/实用工具5204,这样的程序模块5205包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。
185.总线530可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制器、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。
186.电子设备500也可以与一个或多个外部设备600(例如键盘、指向设备、蓝牙设备等)通讯,还可与一个或者多个使得租户能与该电子设备500交互的设备通讯,和/或与使得该电子设备500能与一个或多个其它计算设备进行通讯的任何设备(例如路由器、调制解调器等等)通讯。这种通讯可以通过输入/输出(i/o)接口550进行。并且,电子设备500还可以通过网络适配器560与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通讯。网络适配器560可以通过总线530与电子设备500的其它模块通讯。应当明白,尽管图中未示出,可以结合电子设备500使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储系统等。
187.通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本发明实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd
‑
rom,u盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、或者网络设备等)执行根据本发明实施方式的上述所述农产品种植方法。
188.相比现有技术,本发明的优势在于:
189.通过温室外部环境传感器模块感测的第一环境参数、温室内部环境传感器模块感测的第二环境参数以及水肥参数传感器模块感测的水肥参数,从而确定环境参数调节单元
的一个或多个单元以及水肥控制单元的控制参数,由此,实现温室种植在温湿度、光合反应以及水肥控制,由此,实现温室种植的各类设备的自动控制,促进和提高作物的种植成果和种植效率。
190.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。