一种基于zigbee的小型分布式水环境监测无人艇
技术领域
1.本发明属于环境监测技术领域,具体涉及一种基于zigbee的小型分布式水环境监测无人艇。
背景技术:
2.伴随着日益频繁的人类社会经济活动,许多城市的湖泊正面临着严重的地表水污染。城市流域的水质对于周边地区的居民生产生活、生命健康以及可持续发展极为重要。在农业生产中,使用污染的水体灌溉农田,会破坏土壤,影响农作物的生长,造成减产损失;在渔业养殖中,水污染会危及水生生物的生长和繁衍,除了经济损失外,携带重金属污染元素的鱼类等会经过食物链传播到消费者身上从而带来各类难以治疗的疾病。如何对水污染进行监测和防治是当今人们所面临的最为棘手的任务。
技术实现要素:
3.为提高水环境的监测质量和效率,本发明提供一种基于zigbee的小型分布式水环境监测无人艇,采用以下技术方案:
4.一种基于zigbee的小型分布式水环境监测无人艇,包括船体、电路仓、自稳定平台、停机坪、驱动单元、通信单元、传感单元、控制单元和电磁铁;
5.所述船体底部设置有驱动单元,并安装有水质传感器、水流计和流速计,水流计与流速计用于实时检测水流的方向和速度;
6.所述电路仓位于船体中央,用于存放通信单元、传感单元与控制单元的电路部分以及电池;电路仓包括上仓壳和下仓壳,上仓壳与下仓壳通过防水圈和螺钉固定连接;
7.所述自稳定平台位于电路仓上方,包括固定板、舵机a、舵机b、舵机固定板、支撑架、传动臂a、传动臂b、全向轮和亚克力板;固定板下侧与电路仓固定连接,固定板上侧与舵机固定板固定连接,用于支撑整个平台;舵机a与舵机b分别按照水平方向和垂直方向固定设置于舵机固定板上,且舵机a与舵机b分别通过传动臂a和传动臂b与亚克力板连接,用于控制亚克力板摆动使亚克力板始终保持水平状态;支撑架一端固定于固定板上,另一端通过全向轮与亚克力板连接,用于支撑亚克力板;
8.所述停机坪设置于自稳定平台上方并与亚克力板固定连接,停机坪由太阳能充电板组成,用于为电池充电,太阳能充电控制器位于电路仓内;
9.所述驱动单元用于控制无人艇的位置,通过串口与控制单元进行数据交互;当无人机降落或采集数据时,驱动单元根据水流计与流速计实时检测的水流方向和速度,调整无人艇的朝向与运动速度,以补偿水流对无人艇的推力从而实现无人艇定点;
10.所述通信单元包括zigbee模块和天线,天线设置于船体外侧,通信单元通过串口与控制单元进行数据交互;
11.所述传感单元包括陀螺仪、gps模块、水质传感器、水流计和流速计,陀螺仪通过i2c总线与控制单元进行通信,gps模块通过串口与控制单元进行通信;
12.所述控制单元包括i.mx6 ull嵌入式处理器和hc32f005c6pa处理器,i.mx6 ull嵌入式处理器用于网关控制、信息的接收与转发,hc32f005c6pa处理器用于无人艇的运动控制、水质传感器数据的采集和自稳定平台的控制;
13.所述电磁铁设置于停机坪下方,当无人机安置于停机坪上时,电磁铁通电以吸附固定无人机,当无人机即将起飞时,电磁铁断电以释放无人机。
14.进一步地,电池包括电池a与电池b,电池a为首选的无人艇供电电池,当电池a电量即将耗尽时,无人艇供电自动切换至电池b,同时通过太阳能充电控制器利用太阳能充电板对电池a充电。
15.进一步地,传感单元中的陀螺仪实时采集无人艇船身的俯仰角和侧偏角,将偏移角度转换为舵机a与舵机b的转动脉冲系数,从而控制舵机a与舵机b的转动角度并分别通过传动臂a和传动臂b传动以使亚克力板保持水平状态。
16.进一步地,所述驱动单元包括驱动单元a和驱动单元b,驱动单元a与驱动单元b平行设置于船体两侧后部,分别包括防水电机、电机驱动板和螺旋桨,防水电机带动螺旋桨转动,当驱动单元a与驱动单元b的防水电机全部正转或反转时无人艇直线运行,当防水电机差速转动时无人艇转弯。
17.进一步地,无人机降落或采集数据时,通过水流计与流速计采集水流流向与速度,并使用螺旋桨来矫正无人艇的位置偏移,矫正时首先通过螺旋桨的差速旋转使无人艇运动方向与水流方向相同,然后控制单元将流速计采集的水流速度转换为控制螺旋桨的脉冲波占空比,以控制螺旋桨转速,从而抵消水流影响实现无人艇定点。
18.基于所述无人艇的无人艇分布式运行方法,其特征在于,所述无人艇分布式运行时分为母船和子船,母船的通信单元中配备zigbee协调器模块,子船的通信单元中配备zigbee节点模块,母船与子船按星形网络实现组网,并按照一定的通信协议进行数据传输;母船运行时始终开启自身网络,当子船搜寻到母船的网络时发送网络连接数据包,若网络连接成功则由母船向子船发送应答数据包;数据传输时,母船与子船间的数据传输形式为相同协议的74字节数据帧。
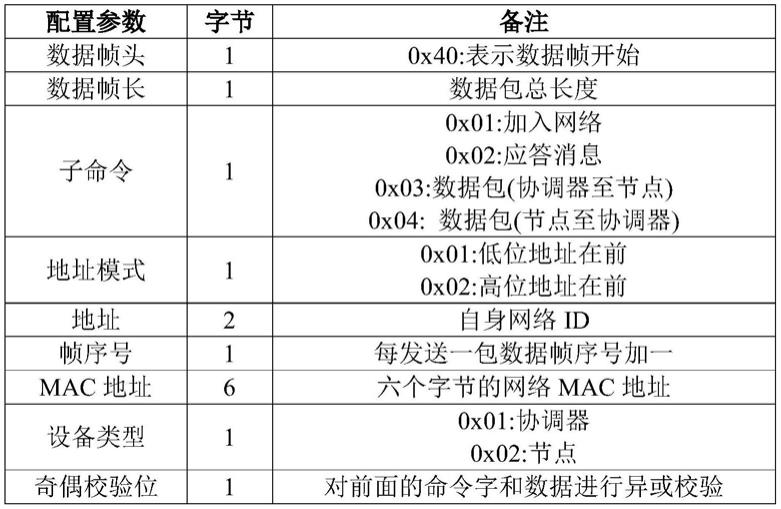
19.进一步地,所述应答数据包由数据帧头、数据帧长、子命令、地址模式、低位地址、高位地址、帧序号、低位网络地址、高位网络地址、mac地址1~mac地址6、设备类型和奇偶校验位组成。
20.进一步地,所述74字节数据帧由数据帧头、数据帧长、子命令、地址模式、低位地址、高位地址、节点序号、帧序号、数据长度、数据字节1~数据字节64和奇偶校验位组成。
21.相比于现有技术,本发明无人艇可搭载无人机,且多无人艇间可组网分布式运行,能够从多方面对水域进行实时监测,提高了水环境监测的质量和效率。
附图说明
22.图1为本发明无人艇的结构示意图;
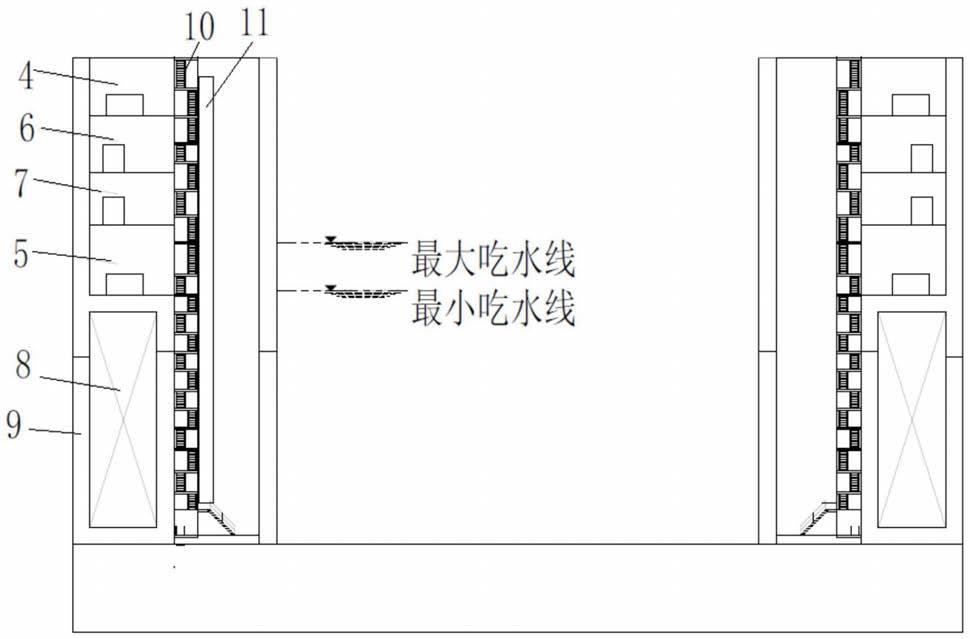
23.图2为本发明无人艇的侧视图;
24.图3为本发明无人艇自稳定平台的结构示意图;
25.图4为本发明无人艇自稳定平台的侧视图;
26.其中,1
‑
船体,2
‑
电路仓,3
‑
自稳定平台,3
‑1‑
固定板,3
‑2‑1‑
舵机a、3
‑2‑2‑
舵机b、
3
‑3‑
舵机固定板,3
‑5‑1‑
传动臂a,3
‑5‑2‑
传动臂b,3
‑6‑
全向轮,3
‑7‑
亚克力板,4
‑
停机坪,5
‑
驱动单元,6
‑
天线,7
‑
电磁铁。
具体实施方式
27.现在结合附图对本发明作进一步详细的说明。
28.如图1和图2所示,本发明无人艇由船体1、电路仓2、自稳定平台3、驱动单元5、通信单元、传感单元、控制单元、水流计、流速计及电磁铁7等组成。
29.电路仓2位于船体1中央,分为上仓壳与下仓壳,通过防水圈加螺钉连接两个部分,电路仓2中存放太阳能充电控制器、驱动单元5电机驱动板、通信单元、传感单元和控制单元等电路板以及两块电池。
30.自稳定平台3位于电路仓2上方,如图3和图4所示,自稳定平台3由固定板3
‑
1、舵机a3
‑2‑
1、舵机b3
‑2‑
2、舵机固定板3
‑
3、支撑架3
‑
4、传动臂a3
‑5‑
1、传动臂b3
‑5‑
2、全向轮3
‑
6和亚克力板3
‑
7组成。亚克力板3
‑
7上方固定有停机坪4,停机坪由太阳能充电板组成。当第一块电池电量即将耗尽时,无人艇供电自动切换至第二块电池,同时通过太阳能充电控制器利用太阳能充电板对第一块电池充电。当无人艇在运行过程中时,由于重心的偏移会导致无人艇有前后倾斜等不稳定情况,进而增加无人机降落的难度。为防止出现降落不稳定的情况,采用该自稳定平台3设计,通过传感单元中的陀螺仪检测船体的俯仰角与侧偏角,在控制单元中,将俯仰角与侧偏角转换成舵机转动的角度,对偏移的角度进行补偿,进而使得停机坪4始终处于水平静止的状态,提高无人机降落时的稳定性。无人机通过gps与图像视觉进行精确降落,当无人机靠近无人艇时,为让无人机上摄像头更好识别停机坪4,在停机坪4上贴上绿色“h”标识,供无人机目标识别,同时在无人机即将降落瞬间,无人机给无人艇发送降落数据包,无人艇收到数据包后将停机坪4底部的电磁铁7通电,使无人机牢牢固定在停机坪4上。
31.控制单元由i.mx6 ull嵌入式处理器与hc32f005c6pa组成,i.mx6 ull主要完成网关控制,信息的收包与转发,hc32f005c6pa主要完成无人艇的运动控制,传感器数据的采集和自稳定平台3的控制。通信单元由zigbee模块与天线6组成,通过串口与控制单元进行数据的交互。
32.传感单元中,陀螺仪通过i2c总线与控制单元进行通信,同时,控制单元通过采集水质传感器的输出端口,利用adc模数转换采集水质数据,gps模块通过串口与控制单元进行通信。
33.驱动单元5由电机驱动板和两个防水电机以及螺旋桨组成,主要用于控制无人艇的位置,当两个电机全部正转或反转时,无人艇实现直线运行,当两个电机实现差速旋转时,实现无人艇的转弯。
34.在无人机降落时,或者采集数据时,需要无人艇实现定点功能。为减小环境风以及水流带来的影响,通过水流计与流速计采集无人艇所在水域的水流流向与速度,并使用螺旋桨来矫正位置偏移。矫正过程中,先采集水流计角度,当水流从无人艇侧面流过时,先调整无人艇的偏航角,使水流从无人艇前方流向后方,再通过流速计采集水流速度,在控制单元中将所测得的水流速度转换为控制螺旋桨的脉冲波的占空比,控制螺旋桨的转速,从而抵消水流的影响,使无人艇达到定点要求。
35.该系统在分布式运行时,子母船进行分布式组网,以便数据的传输,且只有当子船加入母船的网络并连接成功后,方可开始双向传输数据。在母船的通信单元中,使用zigbee协调器进行数据的批量发送与汇集,每当有子船接入时,自动给子船分配一个大小为两个字节的网络地址和六个字节的mac地址,以便后续数据的发送与接收。子船的通信单元使用zigbee模块的节点模块。母船在启用时就将自身的网络开启以等待子船的连接,当子船搜寻到母船的网络时,发送网络连接数据包,若连接成功,母船向子船发送17个字节的应答数据包,该数据包由数据帧头、数据帧长、子命令、地址模式、低位地址、高位地址、帧序号、低位网络地址、高位网络地址、mac地址1、mac地址2、mac地址3、mac地址4、mac地址5、mac地址6、设备类型与奇偶校验位组成,如表1所示。当连接成功需要传输数据包时,字母船之间通过74个字节的数据帧进行通信,数据帧由数据帧头、数据帧长、子命令、地址模式、低位地址、高位地址、节点序号、帧序号、数据长度、数据字节1~数据字节64和奇偶校验位组成,如表2所示。当子船向母船传输数据时,同样由74个字节组成相同协议的数据帧。
36.表1应答数据包
[0037][0038]
表2数据帧
[0039][0040]
需要注意的是,发明中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0041]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。