1.本发明涉及光距离测定装置。
背景技术:
2.具有如下的光测距方法:使用由光源出射的光,通过脉冲传播方式、三角测距方式、共焦点方式、白色干涉方式或波长扫描干涉方式等方式,来测定从光源到对象物的距离。这些方式中的白色干涉方式或波长扫描干涉方式等是使用光的干涉现象的干涉方式。
3.干涉方式为,将由光源出射的光分支为测定光和参照光,使测定光在对象物上反射后的光即反射光与参照光发生干涉,基于反射光和参照光相互增强的条件,来测定从光源到对象物的距离。
4.例如,谱域方式等白色干涉方式使用出射宽频带的光的光源。白色干涉方式将由光源出射的宽频带的光分支为测定光与参照光。白色干涉方式通过分光器在空间上进行光谱分离,基于光谱分离后的反射光与光谱分离后的参照光的干涉条件,测定从光源到对象物的距离。
5.此外,例如,波长扫描干涉方式对从光源出射的光进行波长扫描。波长扫描干涉方式将波长扫描后的光分支为测定光与参照光。波长扫描干涉方式使反射光与将波长扫描后的光分支而得到的参照光发生干涉,其中,该反射光是将波长扫描后的光分支而得到的测定光在对象物上反射后的光。波长扫描干涉方式通过测定反射光的频率和参照光的频率,来测定从光源到对象物的距离。
6.例如,在非专利文献1中,公开了一种将基于波长扫描干涉方式的光距离测定装置应用于医疗用途的波长扫描型光干涉断层计(ss
‑
oct:swept source
‑
optical coherence tomography)。
7.现有技术文献
8.非专利文献
9.非专利文献1:春名正光,“光
コヒーレンストモグラフィ
―(oct)”,[online],平成22年,medical photonics,[平成31年2月4日检索],因特网〈url:http://www.medicalphotonics.jp/pdf/mp0001/0001_029.pdf〉
技术实现要素:
[0010]
发明要解决的问题
[0011]
但是,以往的光距离测定装置存在如下的问题:从能够通过一次测定而测定的光源到对象物的距离的范围被限定在用于向对象物照射测定光的光学系统所具有的焦距的范围。
[0012]
本发明用于解决上述问题,其目的在于,提供一种能够扩大距对象物的距离测定的范围且能够高精度地测定该距离的光距离测定装置。
[0013]
用于解决问题的手段
[0014]
本发明的光距离测定装置具备:发送部,其具有分支部、测定光分支部、参照光分支部、第1光学系统及第2光学系统,其中,该分支部对输入的作为连续波的激光进行分支,将分支后的激光作为测定光及参照光输出,该测定光分支部对分支部输出的测定光进行分支,将分支后的测定光作为第1测定光及第2测定光输出,该参照光分支部对分支部输出的参照光进行分支,将分支后的参照光作为第1参照光及第2参照光输出,该第1光学系统具有第1瑞利长度,用于向对象物照射第1测定光,该第2光学系统具有与第1瑞利长度不同的第2瑞利长度,并且具有与第1光学系统具有的焦距相等的焦距,用于向对象物照射第2测定光;第1接收部,其接受第1参照光、和第1测定光在对象物上反射后的光即第1反射光,输出表示第1参照光和第1反射光的第1接收信号;以及第2接收部,其接受第2参照光、和第2测定光在对象物上反射后的光即第2反射光,输出表示第2参照光和第2反射光的第2接收信号。
[0015]
发明的效果
[0016]
根据本发明,能够扩大距对象物的距离测定的范围且能够高精度地测定该距离。
附图说明
[0017]
图1是示出实施方式1的光距离测定装置的主要部分的结构的一例的框图。
[0018]
图2是示出应用了实施方式1的光距离测定装置的加工装置的一例的图。
[0019]
图3是示出应用了实施方式1的光距离测定装置的加工装置的一例的图。
[0020]
图4a是示出实施方式1的发送部与对象物之间的距离的一例的图。图4b是示出实施方式1的发送部与对象物之间的距离为x2的情况下的向第1光干涉部输入的第1参照光与第1反射光的关系的一例的图。图4c是示出由频率测定部基于图4b所示的某一时间点t1的第1接收信号而测定出的第1干涉光的频谱的图。图4d是示出由频率测定部基于图4a所示的对象物的位置处的某一时间点的第1接收信号而测定出的第1干涉光的频谱的图。
[0021]
图5a是示出光学系统所具有的瑞利长度与实施方式1的距离计算部能够计算从发送部到对象物的距离的范围之间的关系的一例的图。图5b是示出实施方式1的从发送部到对象物的距离固定的情况下的、光学系统所具有的瑞利长度与反射波的强度之间的关系的一例的图。图5c是示出反射波的强度与实施方式1的距离计算部计算的从发送部到对象物的距离所包含的误差之间的关系的一例的图。
[0022]
图6是示出实施方式1的第1测定光和第2测定光、以及第1测定光和第2测定光在对象物上反射后的反射光即第1反射光和第2反射光的路径的一例的图。
[0023]
图7是示出实施方式2的光距离测定装置的主要部分的结构的一例的框图。
具体实施方式
[0024]
以下,参照附图对本发明的实施方式详细进行说明。
[0025]
实施方式1.
[0026]
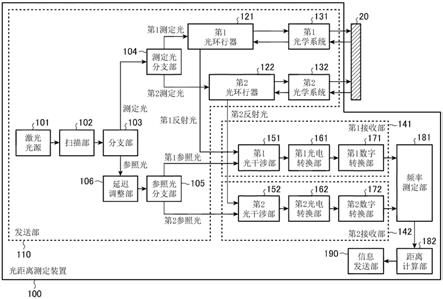
图1是示出实施方式1的光距离测定装置100的主要部分的结构的一例的框图。
[0027]
光距离测定装置100具备激光光源101、扫描部102、分支部103、测定光分支部104、参照光分支部105、延迟调整部106、第1光环行器121、第2光环行器122、第1光学系统131、第2光学系统132、第1光干涉部151、第2光干涉部152、第1光电转换部161、第2光电转换部162、第1数字转换部171、第2数字转换部172、频率测定部181、距离计算部182、以及信息发送部
190。
[0028]
激光光源101出射作为连续光的激光。在实施方式1中,激光光源101是气体激光器或半导体激光器等出射规定频率的激光的光源。
[0029]
激光光源101在实施方式1的光距离测定装置100中不是必须的结构。例如,光距离测定装置100也可以接受由具有激光光源101的外部的激光产生装置出射的激光而进行动作。
[0030]
扫描部102输入由激光光源101出射的激光。扫描部102对输入的激光进行波长扫描,将扫描后的激光作为扫描光输出。由扫描部102输出的扫描光是连续波的激光。
[0031]
分支部103由光耦合器等构成,对输入的连续波的激光进行分支,将分支后的激光作为测定光及参照光输出。更具体而言,分支部103对由扫描部102出射的激光即扫描光进行分支,将分支后的激光作为测定光及参照光输出。
[0032]
测定光分支部104对分支部103输出的测定光进行分支,将分支后的测定光作为第1测定光及第2测定光输出。具体而言,测定光分支部104由pbs(polarizing beam splitter:偏振光束分光器)等构成,测定光分支部104通过对分支部103输出的测定光进行偏振分离而将其分支,将分支后的测定光作为第1测定光即第1偏振测定光和第2测定光即第2偏振测定光而输出。第1偏振测定光和第2偏振测定光例如是振动方向互不相同的直线偏振光。
[0033]
第1光环行器121例如由三端口光环行器构成,向第1光学系统131引导由测定光分支部104输出的第1测定光。具体而言,第1光环行器121向第1光学系统131引导由测定光分支部104输出的第1测定光即第1偏振测定光。
[0034]
第1光学系统131向对象物20照射第1测定光。具体而言,例如,第1光学系统131由1个以上的透射透镜或1个以上的反射透镜等透镜构成,第1光学系统131扩大第1光环行器121引导到第1光学系统131的第1偏振测定光的光束直径,将扩大了光束直径的第1偏振测定光向对象物20照射。
[0035]
第1光学系统131具有第1瑞利长度。另外,瑞利长度是激光中的表示光学系统的聚光特性的1个值,由光学系统会聚的激光的直径是表示被视为足够小的从该光学系统朝向焦点的方向的长度的范围的值。
[0036]
第1光学系统131向第1光环行器121引导第1反射光,该第1反射光是照射到对象物20的第1偏振测定光在对象物20上反射后的光。
[0037]
第1光环行器121向第1光干涉部151引导第1反射光。
[0038]
第2光环行器122例如由三端口光环行器构成,向第2光学系统132引导由测定光分支部104输出的第2测定光。具体而言,第2光环行器122向第2光学系统132引导由测定光分支部104输出的第2测定光即第2偏振测定光。
[0039]
第2光学系统132向对象物20照射第2测定光。具体而言,例如,第2光学系统132由1个以上的透射透镜或1个以上的反射透镜等透镜构成,第2光学系统132扩大第2光环行器122引导到第1光学系统131的第2偏振测定光的光束直径,将扩大了光束直径的第2偏振测定光向对象物20照射。
[0040]
第2光学系统132具有与第1瑞利长度不同的第2瑞利长度。
[0041]
第2光学系统132具有与第1光学系统131所具有的焦距相等的焦距。另外,相等的
焦距不限于严格相等的焦距,也包含大致相等的焦距。
[0042]
第2光学系统132向第2光环行器122引导第2反射光,该第2反射光是照射到对象物20的第2偏振测定光在对象物20上反射后的光。
[0043]
第2光环行器122向第2光干涉部152引导第2反射光。
[0044]
参照光分支部105对分支部103输出的参照光进行分支,将分支后的参照光作为第1参照光及第2参照光输出。具体而言,参照光分支部105由pbs等构成,参照光分支部105通过对分支部103输出的参照光进行偏振分离而将其分支,将分支后的参照光作为第1参照光即第1偏振参照光和第2参照光即第2偏振参照光而输出。第1偏振参照光和第2偏振参照光例如是振动方向互不相同的直线偏振光。
[0045]
在以下的说明中,设为第1偏振测定光的振动方向与第1偏振参照光的振动方向相同、第2偏振测定光的振动方向与第2偏振参照光的振动方向相同来进行说明。
[0046]
将参照光分支部105输出的第1参照光向第1光干涉部151引导。
[0047]
将参照光分支部105输出的第2参照光向第2光干涉部152引导。
[0048]
延迟调整部106调整由分支部103输出的测定光与参照光的路径差。
[0049]
实施方式1的光距离测定装置100通过激光光源101、扫描部102、分支部103、测定光分支部104、参照光分支部105、延迟调整部106、第1光环行器121、第2光环行器122、第1光学系统131及第2光学系统132而构成发送部110。
[0050]
第1光干涉部151使第1参照光与第1反射光发生干涉,将第1参照光与第1反射光干涉后的干涉光作为第1干涉光输出。具体而言,第1光干涉部151例如由90度光混合器构成,通过合成第1参照光与第1反射光而输出第1干涉光。
[0051]
第1光电转换部161对第1光干涉部151输出的第1干涉光进行光电转换,输出表示第1干涉光的第1模拟信号。
[0052]
第1数字转换部171对第1模拟信号进行a/d转换,将a/d转换后的第1模拟信号作为第1接收信号输出,该第1接收信号是数字信号。
[0053]
实施方式1的光距离测定装置100通过第1光干涉部151、第1光电转换部161及第1数字转换部171而构成第1接收部141。
[0054]
即,第1接收部141接受第1参照光和第1反射光,输出表示第1参照光及第1反射光的第1接收信号,其中,该第1反射光是第1测定光在对象物20上反射后的光。
[0055]
第2光干涉部152使第2参照光与第2反射光发生干涉,将第2参照光与第2反射光干涉后的干涉光作为第2干涉光输出。具体而言,第2光干涉部152例如由90度光混合器构成,通过将第2参照光与第2反射光合成而输出第2干涉光。
[0056]
第2光电转换部162对第2光干涉部152输出的第2干涉光进行光电转换,输出表示第2干涉光的第2模拟信号。
[0057]
第2数字转换部172对第2模拟信号进行a/d转换,将a/d转换后的第2模拟信号作为第2接收信号输出,该第2接收信号是数字信号。
[0058]
实施方式1的光距离测定装置100通过第2光干涉部152、第2光电转换部162及第2数字转换部172而构成第2接收部142。
[0059]
即,第2接收部142接受第2参照光和第2反射光,输出表示第2参照光及第2反射光的第2接收信号,其中,该第2反射光是第2测定光在对象物20上反射后的光。
[0060]
频率测定部181基于第1接收信号,测定第1参照光及第1反射光的每个频率成分的强度。此外,频率测定部181输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0061]
此外,频率测定部181基于第2接收信号,测定第2参照光及第2反射光的每个频率成分的强度。此外,频率测定部181输出表示测定出的第2参照光及第2反射光的每个频率成分的强度的第2信号信息。
[0062]
更具体而言,例如,频率测定部181通过对第1接收信号进行傅里叶变换,来测定第1参照光及第1反射光的每个频率成分的强度。此外,频率测定部181通过对第2接收信号进行傅里叶变换,来测定第2参照光及第2反射光的每个频率成分的强度。
[0063]
距离计算部182基于频率测定部181输出的第1信号信息或第2信号信息,计算从发送部110到对象物20的距离。此外,距离计算部182输出表示距离计算部182计算出的从发送部110到对象物20的距离的距离信息。从发送部110到对象物20的距离例如是从第1光学系统131或第2光学系统132到对象物20的距离。从发送部110到对象物20的距离不限于从第1光学系统131或第2光学系统132到对象物20的距离,只要是从发送部110中的成为基准的结构到对象物20的距离即可。
[0064]
具体而言,例如,距离计算部182通过偏振分集方式,基于频率测定部181输出的第1信号信息或第2信号信息,计算从发送部110到对象物20的距离。此外,距离计算部182输出表示距离计算部182计算出的从发送部110到对象物20的距离的距离信息。
[0065]
距离计算部182也可以基于频率测定部181输出的第1信号信息及第2信号信息,计算从发送部110到对象物20的距离。
[0066]
距离计算部182计算出的从发送部110到对象物20的距离例如是从第1光环行器121、第2光环行器122、第1光学系统131或第2光学系统132到对象物20的距离。
[0067]
例如,在距离计算部182计算出的从发送部110到对象物20的距离是从第1光环行器121到对象物20的距离的情况下,延迟调整部106调整如下两个路径长度之和与从参照光由分支部103输出起到输入到第1光干涉部151为止的路径长度之间的路径差,其中,上述两个路径长度分别为:从测定光由分支部103输出起,经由测定光分支部104成为第1测定光,直到第1测定光经由第1光环行器121朝向第1光学系统131输出为止的路径长度;以及从第1反射光被输入到第1光环行器121起到输入到第1光干涉部151为止的路径长度。
[0068]
信息发送部190进行用于向外部发送由距离计算部182输出的表示发送部110与对象物20之间的距离的距离信息的控制。
[0069]
另外,激光光源101与扫描部102之间、扫描部102与分支部103之间、分支部103与测定光分支部104之间、分支部103与延迟调整部106之间、以及延迟调整部106与测定光分支部104之间例如通过光纤而连接,激光经由该光纤被引导。此外,测定光分支部104与第1光环行器121之间、第1光环行器121与第1光干涉部151之间、测定光分支部104与第2光环行器122之间、第2光环行器122与第2光干涉部152之间、测定光分支部104与第1光干涉部151之间、以及测定光分支部104与第2光干涉部152之间例如通过作为保持偏振的振幅方向的偏振保持光纤的光纤而连接,作为偏振光的激光经由该光纤被引导。
[0070]
参照图2及图3对实施方式1的光距离测定装置100的应用例进行说明。
[0071]
图2及图3是示出应用了实施方式1的光距离测定装置100的加工装置10的一例的
图。
[0072]
图2所示的加工装置10具备卡盘12、加工头11、头移动控制部13及头移动机构14。
[0073]
对象物20是加工装置10将要加工的物体。
[0074]
卡盘12是用于固定对象物20的台座。
[0075]
加工头11是用于加工对象物20的部位。加工头11在加工对象物20时,可以与对象物20接触地进行加工,也可以在非接触的状态下对对象物20进行加工。
[0076]
头移动控制部13取得由光距离测定装置100输出的距离信息,基于该距离信息,生成用于使加工头11相对于卡盘12进行移动的控制信号。头移动控制部13将生成的控制信号向头移动机构14输出。
[0077]
头移动机构14接收由头移动控制部13输出的控制信号,基于该控制信号,使加工头11相对于卡盘12进行移动。
[0078]
图3所示的加工装置10具备卡盘12、加工头11、卡盘移动控制部15及卡盘移动机构16。
[0079]
卡盘12及加工头11与图2所示的卡盘12及加工头11相同,因此省略说明。
[0080]
卡盘移动控制部15取得由光距离测定装置100输出的距离信息,基于该距离信息,生成用于使卡盘12相对于加工头11进行移动的控制信号。卡盘移动控制部15将生成的控制信号向卡盘移动机构16输出。
[0081]
卡盘移动机构16接收由卡盘移动控制部15输出的控制信号,基于该控制信号,使卡盘12相对于加工头11进行移动。
[0082]
在图2及图3中,光距离测定装置100中的第1光环行器121、第2光环行器122、第1光学系统131及第2光学系统132被固定于加工头11。第1光环行器121、第2光环行器122、第1光学系统131及第2光学系统132在加工头11上固定的位置是已知的。即,头移动控制部13或卡盘移动控制部15能够基于光距离测定装置100输出的距离信息所表示的从发送部110到对象物20的距离,来计算加工头11与对象物20之间的距离。
[0083]
参照图4,对实施方式1的距离计算部182计算从发送部110到对象物20的距离的方法进行说明。
[0084]
图4a是示出实施方式1的发送部110与对象物20之间的距离的一例的图。
[0085]
作为一例,图4a示出对象物20位于与实施方式1的发送部110分离了x1、x2、及x3的位置。
[0086]
图4b是示出实施方式1的发送部110与对象物20之间的距离为x2的情况下的向第1光干涉部151输入的第1参照光与第1反射光之间的关系的一例的图。在图4b中,横轴表示经过时间,纵轴表示频率。
[0087]
由于向分支部103输入的激光是扫描光,因此,从分支部103输出的参照光及测定光、以及测定光在对象物20上反射后的光即反射光成为被扫描的光。即,向第1光干涉部151输入的第1参照光及第1反射光的频率随着时间经过而与扫描光同样地变化。在实施方式1中,扫描光中的每单位时间的频率变化的值是已知的。
[0088]
第1反射光在第1光干涉部151中,根据发送部110与对象物20之间的距离而相对于第1参照光延迟。因此,在图4b中,示出了第1反射光相对于第1参照光向右侧偏移了时间δt2的状态。
[0089]
频率测定部181基于某一时间点t1的第1干涉光,测定第1干涉光的每个频率成分的强度。
[0090]
图4c是示出由频率测定部181基于图4b所示的某一时间点t1的第1接收信号而测定出的第1干涉光的频谱的图。在图4c中,横轴表示频率,纵轴表示第1干涉光的强度。
[0091]
在图4c中,在2个频带中,第1干涉光的强度变强。在图4c中,在作为第1干涉光的强度变高的2个频带中,高频率的频率为fr的光是第1参照光,低频带的频率为f2的光是第1反射光。
[0092]
频率测定部181生成表示第1参照光的频率为fr且第1反射光的频率为f2的第1信号信息,输出该第1信号信息。
[0093]
距离计算部182基于频率测定部181输出的第1信号信息和已知的扫描光中的每单位时间的频率变化的值,计算第1反射光相对于第1参照光延迟的时间δt2。
[0094]
距离计算部182将计算出的时间δt2乘以已知的光速,进一步乘以1/2,由此,计算从发送部110到对象物20的距离即x2。
[0095]
图4d是示出由频率测定部181基于图4a所示的对象物20的位置处的某一时间点的第1接收信号而测定出的第1干涉光的频谱的图。
[0096]
例如,如图4a所示,在发送部110与对象物20之间的距离是比x2短的x1的情况下,如图4d所示,第1参照光的频率与第1反射光的频率之差变小。在该情况下,通过距离计算部182计算而求出的第1反射光相对于第1参照光延迟的时间比发送部110与对象物20之间的距离为x2时的时间δt2短。
[0097]
此外,例如,如图4a所示,在发送部110与对象物20之间的距离为比x2长的x3的情况下,如图4d所示,第1参照光的频率与第1反射光的频率之差变大。在该情况下,通过距离计算部182计算而求出的第1反射光相对于第1参照光延迟的时间比发送部110与对象物20之间的距离为x2时的时间δt2长。
[0098]
另外,到此为止,将向第1光干涉部151输入的第1参照光和第1反射光作为一例,针对实施方式1的距离计算部182计算从发送部110到对象物20的距离的方法进行了说明,但距离计算部182计算从发送部110到对象物20的距离的方法在向第2光干涉部152输入的第2参照光和第2反射光中也是同样的,因此,省略说明。
[0099]
能够由距离计算部182计算从发送部110到对象物20的距离的距离是包含第1光学系统131及第2光学系统132所具有的焦距在内的该焦距的附近。如上所述,第1光学系统131和第2光学系统132具有彼此相等的焦距。
[0100]
参照图5,针对使用了第1光学系统131或第2光学系统132时的距离计算部182能够计算从发送部110到对象物20的距离的范围进行说明。
[0101]
以下,作为一例,设为第2光学系统132所具有的第2瑞利长度比第1光学系统131所具有的第1瑞利长度长来进行说明。
[0102]
图5a是示出光学系统所具有的瑞利长度与距离计算部182能够计算从发送部110到对象物20的距离的范围之间的关系的一例的图。
[0103]
根据图5a可知,光学系统所具有的瑞利长度越长,则距离计算部182能够计算从发送部110到对象物20的距离的范围越宽。
[0104]
即,第2光学系统132所具有的第2瑞利长度比第1光学系统131所具有的第1瑞利长
度长,因此,距离计算部182能够基于第2接收部142输出的第2接收信号而计算的从发送部110到对象物20的距离的范围比能够基于第1接收部141输出的第1接收信号而计算的从发送部110到对象物20的距离的范围宽。
[0105]
图5b是示出从发送部110到对象物20的距离固定的情况下的光学系统所具有的瑞利长度与反射波的强度之间的关系的一例的图。
[0106]
瑞利长度越长则光斑直径越小。通常,对象物20在表面具有表面粗糙度,因此,测定光在对象物20反射后的反射光不仅具有正反射成分,还具有漫反射成分。因此,漫反射成分的比率越大则返回光学系统的反射光越衰减。光斑直径越大则反射光的衰减量越大,光斑直径越小则反射光的衰减量越小。即,瑞利长度越长则反射波的强度越弱,瑞利长度越短则反射波的强度越强。
[0107]
根据图5b可知,在从发送部110到对象物20的距离固定的情况下,光学系统所具有的瑞利长度越长,则反射波的强度越弱。
[0108]
即,由于第2光学系统132所具有的第2瑞利长度比第1光学系统131所具有的第1瑞利长度长,因此,距离计算部182,第2接收部142输出的第2接收信号所包含的第2反射波的强度比第1接收部141输出的第1接收信号所包含的第1反射波的强度弱。
[0109]
图5c是示出反射波的强度与距离计算部182计算出的从发送部110到对象物20的距离所包含的误差之间的关系的一例的图。
[0110]
根据图5c可知,在从发送部110到对象物20的距离固定的情况下,反射波的强度越强,则距离计算部182计出算的从发送部110到对象物20的距离所包含的误差越小。
[0111]
即,第2接收部142输出的第2接收信号所包含的第2反射波的强度比第1接收部141输出的第1接收信号所包含的第1反射波的强度弱,因此,距离计算部182基于第2接收部142输出的第2接收信号而计算出的从发送部110到对象物20的距离所包含的误差比基于第1接收部141输出的第1接收信号而计算出的从发送部110到对象物20的距离所包含的误差大。
[0112]
如上所述,使用第1光学系统131测定了从发送部110到对象物20的距离的情况与使用第2光学系统132测定了从发送部110到对象物20的距离的情况相比,测定范围窄,但测定误差小。
[0113]
例如,首先,作为第1步骤,光距离测定装置100针对从发送部110到物体的距离未知的对象物20,基于第2接收部142输出的第2接收信号,测定粗略的从发送部110到对象物20的距离。
[0114]
接着,作为第2步骤,加工装置10基于从光距离测定装置100取得的表示粗略的从发送部110到对象物20的距离的距离信息,使加工头11或卡盘12移动,进行粗略的对位。
[0115]
接着,作为第3步骤,光距离测定装置100基于第1接收部141输出的第1接收信号,计算准确的从发送部110到对象物20的距离。
[0116]
参照图6,说明光距离测定装置100使用第1偏振测定光和第2偏振测定光以及第1偏振参照光和第2偏振参照光来测定从发送部110到对象物20的距离的效果。
[0117]
图6是示出第1测定光和第2测定光、以及第1测定光和第2测定光在对象物20上反射后的反射光即第1反射光和第2反射光的路径的一例的图。
[0118]
对象物20中的被第1测定光及第2测定光照射的表面具有表面粗糙度。
[0119]
因此,如图6所示,第1测定光及第2测定光在该表面上反射后的第1反射光及第2反
射光不仅具有朝向与第1测定光及第2测定光相同的路径反射的正反射成分,还具有以较宽的角度均匀地扩展而反射的漫反射成分。因此,向第1光学系统131入射的反射光具有第1反射光的成分和第2反射光中的在该表面上进行漫反射而得到的杂散光的成分。此外,向第2光学系统132入射的反射光具有第2反射光的成分和第1反射光中的在该表面上进行漫反射而得到的杂散光的成分。
[0120]
另一方面,如上所述,实施方式1的光距离测定装置100使用通过测定光分支部104对测定光进行偏振分离而分支出的第1偏振测定光和第2偏振测定光、以及通过参照光分支部105对参照光进行偏振分离而分支出的第1偏振参照光和第2偏振参照光,来测定从发送部110到对象物20的距离。
[0121]
振动方向不同的2个偏振波不发生干涉。因此,入射到第1光学系统131的第2反射光中的在该表面上进行漫反射而得到的杂散光的成分在第1光干涉部151中与第1反射光的成分不发生干涉。因此,频率测定部181能够基于第1反射光的成分,准确地测定第1接收信号中的第1测定光的频率。此外,同样,入射到第2光学系统132的第1反射光中的在该表面上进行漫反射而得到的杂散光的成分在第2光干涉部152中与第2反射光的成分不发生干涉。因此,频率测定部181能够基于第2反射光的成分,准确地测定第2接收信号中的第2测定光的频率。
[0122]
在上述的第3步骤中,光距离测定装置100在测定从发送部110到对象物20的距离时,也可以基于第1接收部141输出的第1接收信号和第2接收部142输出的第2接收信号,计算准确的从发送部110到对象物20的距离。
[0123]
更具体而言,例如,频率测定部181也可以基于将第1接收信号与第2接收信号合成后的信号,测定第1参照光及第1反射光的每个频率成分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。距离计算部182基于频率测定部181输出的第1信号信息,计算从发送部110到对象物20的距离。
[0124]
通过这样构成,在第3步骤中,光距离测定装置100能够更加准确地计算从发送部110到对象物20的距离。
[0125]
此外,例如,在第3步骤中,频率测定部181也可以通过偏振分集方式,基于第1接收信号或第2接收信号来测定第1参照光及第1反射光的每个频率成分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0126]
例如,第1偏振测定光与第2偏振测定光之间的偏振比率根据光距离测定装置100内的环境温度、在光纤内传播时产生的干扰、对象物20的材质、以及对象物20的表面的状态等发生变动。在频率测定部181仅使用仅通过一方的偏振波而生成的第1接收信号对频率进行测定的情况下,当偏振比率变动时,振动方向不同的2个偏振波不发生干涉,因此,第1接收部141中的第1反射波的接收灵敏度有时下降。
[0127]
另一方面,2个偏振波的强度的合计是固定的,因此,即便一方的偏振的强度下降,另一方的偏振的强度也上升该下降的量。
[0128]
因此,频率测定部181通过偏振分集方式,基于由通过2个偏振波分别生成的第1接收信号或第2接收信号,测定第1参照光及第1反射光的每个频率成分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0129]
通过这样构成,在第3步骤中,光距离测定装置100针对第1偏振测定光与第2偏振
测定光之间的偏振比率的变动的耐力增加,即便在偏振比率发生了变动的情况下,也能够更加准确地计算从发送部110到对象物20的距离。
[0130]
如以上那样,光距离测定装置100具备:发送部110,其具有分支部103、测定光分支部104、参照光分支部105、第1光学系统131及第2光学系统132,该分支部103对输入的连续波的激光进行分支,将分支后的激光作为测定光及参照光输出,该测定光分支部104对分支部103输出的测定光进行分支,将分支后的测定光作为第1测定光及第2测定光输出,该参照光分支部105对分支部103输出的参照光进行分支,将分支后的参照光作为第1参照光及第2参照光输出,该第1光学系统131具有第1瑞利长度,用于向对象物20照射第1测定光,该第2光学系统132具有与第1瑞利长度不同的第2瑞利长度,并且具有与第1光学系统131所具有的焦距相等的焦距,用于向对象物20照射第2测定光;第1接收部141,其接受第1参照光及第1反射光,输出表示第1参照光及第1反射光的第1接收信号,其中,该第1反射光是第1测定光在对象物20反射后的光;以及第2接收部142,其接受第2参照光及第2反射光,输出表示第2参照光及第2反射光的第2接收信号,其中,该第2反射光是第2测定光在对象物20反射后的光。
[0131]
通过这样构成,光距离测定装置100能够扩大从发送部110到对象物20的距离测定的范围,并且能够高精度地测定该距离。
[0132]
此外,光距离测定装置100在上述结构的基础上,还具备:频率测定部181,其基于第1接收信号,测定第1参照光及第1反射光的每个频率成分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息,并且,基于第2接收信号,测定第2参照光及第2反射光的每个频率成分的强度,输出表示测定出的第2参照光及第2反射光的每个频率成分的强度的第2信号信息;以及距离计算部182,其基于频率测定部181输出的第1信号信息或第2信号信息,计算从发送部110到对象物20的距离,输出表示计算出的从发送部110到对象物20的距离的距离信息。
[0133]
通过这样构成,光距离测定装置100能够扩大从发送部110到对象物20的距离测定的范围,并且能够高精度地测定该距离。
[0134]
此外,频率测定部181构成为,基于将第1接收信号与第2接收信号合成后的信号,测定第1参照光及第1反射光的每个频率成分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0135]
通过这样构成,光距离测定装置100能够更加高精度地测定从发送部110到对象物20的距离。
[0136]
此外,光距离测定装置100在上述结构的基础上还构成为,测定光分支部104通过对分支部103输出的测定光进行偏振分离而将其分支,将分支后的测定光作为第1测定光即第1偏振测定光和第2测定光即第2偏振测定光而输出,参照光分支部105通过对分支部103输出的参照光进行偏振分离而将其分支,将分支后的参照光作为第1参照光即第1偏振参照光和第2参照光即第2偏振参照光而输出。
[0137]
通过这样构成,光距离测定装置100能够扩大从发送部110到对象物20的距离测定的范围,并且能够更加高精度地测定该距离。
[0138]
此外,光距离测定装置100在上述结构的基础上还构成为,频率测定部181通过偏振分集方式,基于第1接收信号或第2接收信号来测定第1参照光及第1反射光的每个频率成
分的强度,输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0139]
通过这样构成,光距离测定装置100针对第1偏振测定光与第2偏振测定光之间的偏振比率的变动的耐力增加,即便在偏振比率发生了变动的情况下,也能够更加高精度地测定从发送部110到对象物20的距离。
[0140]
此外,光距离测定装置100在上述结构的基础上还构成为,发送部110具有对输入的激光进行波长扫描并将扫描后的激光作为扫描光输出的扫描部102,分支部103对扫描部102输出的扫描光进行分支,将分支后的扫描光作为测定光及参照光输出,第1接收部141具有:第1光干涉部151,其使第1参照光与第1反射光发生干涉,将第1参照光与第1反射光干涉后的干涉光作为第1干涉光输出;第1光电转换部161,其对第1光干涉部151输出的第1干涉光进行光电转换,输出表示第1干涉光的第1模拟信号;以及第1数字转换部171,其对第1模拟信号进行a/d转换,将a/d转换后的第1模拟信号作为第1接收信号输出,该第1接收信号是数字信号,第2接收部142具有:第2光干涉部152,其使第2参照光与第2反射光发生干涉,将第2参照光与第2反射光干涉后的干涉光作为第2干涉光输出;第2光电转换部162,其对第2光干涉部152输出的第2干涉光进行光电转换,输出表示第2干涉光的第2模拟信号;以及第2数字转换部172,其对第2模拟信号进行a/d转换,将a/d转换后的第2模拟信号作为第2接收信号输出,该第2接收信号是数字信号。
[0141]
通过这样构成,光距离测定装置100能够扩大从发送部110到对象物20的距离测定的范围,并且能够高精度地测定该距离。
[0142]
实施方式2.
[0143]
参照图7对实施方式2的光距离测定装置100a进行说明。
[0144]
光距离测定装置100a将实施方式1的光距离测定装置100中的激光光源101和扫描部102置换为激光光源101a。此外,光距离测定装置100a将实施方式1的光距离测定装置100中的发送部110、第1接收部141、第2接收部142、频率测定部181及距离计算部182置换为发送部110a、第1接收部141a、第2接收部142a、频率测定部181a及距离计算部182a。
[0145]
图7是示出实施方式2的光距离测定装置100a的主要部分的结构的一例的框图。
[0146]
光距离测定装置100a具备激光光源101a、分支部103a、测定光分支部104、参照光分支部105、延迟调整部106、第1光环行器121、第2光环行器122、第1光学系统131、第2光学系统132、第1合成部153、第2合成部154、第1分光部155、第2分光部156、第1光电转换部161a、第2光电转换部162a、第1数字转换部171a、第2数字转换部172a、频率测定部181a、距离计算部182a及信息发送部190。
[0147]
在光距离测定装置100a的结构中,针对与光距离测定装置100同样的结构标注相同的标号并省略重复的说明。即,针对标注了与图1所记载的标号相同的标号的图7的结构,省略说明。
[0148]
激光光源101a出射作为连续光的激光。在实施方式2中,激光光源101a是由ase(amplified spontaneous emission:放大式自发射)光源等构成的出射具有多个频率的激光的光源。
[0149]
激光光源101a在实施方式2的光距离测定装置100a中不是必须的结构。例如,光距离测定装置100a也可以接受由具有激光光源101a的外部的激光产生装置出射的激光而进
行动作。
[0150]
分支部103a由光耦合器等构成,对输入的连续波的激光进行分支,将分支后的激光作为测定光及参照光输出。更具体而言,分支部103a对激光光源101a出射的具有多个频率的激光进行分支,将分支后的激光作为测定光及参照光输出。
[0151]
实施方式2的光距离测定装置100a通过激光光源101a、分支部103a、测定光分支部104、参照光分支部105、延迟调整部106、第1光环行器121、第2光环行器122、第1光学系统131及第2光学系统132而构成发送部110a。
[0152]
第1合成部153由光耦合器等构成,对第1参照光及第1反射光进行合成,将合成后的第1参照光及第1反射光作为第1合成光输出。
[0153]
第1分光部155由衍射光栅等构成,对第1合成部153输出的第1合成光在空间上进行光谱分离,将光谱分离后的第1合成光作为第1光谱分离光来照射。
[0154]
第1光电转换部161a具有呈阵列状排列的光电元件,接受从第1分光部155照射的第1光谱分离光,输出将表示第1合成光的强度的信息与呈阵列状排列的每个光电元件的位置对应起来的第1模拟信号。
[0155]
第1数字转换部171a对第1模拟信号进行a/d转换,将a/d转换后的第1模拟信号作为第1接收信号输出,该第1接收信号是数字信号。
[0156]
实施方式2的光距离测定装置100a通过第1合成部153、第1分光部155、第1光电转换部161a及第1数字转换部171a而构成第1接收部141a。
[0157]
即,第1接收部141a接受第1参照光和第1测定光在对象物20上反射后的光即第1反射光,输出表示第1参照光及第1反射光的第1接收信号。
[0158]
第2合成部154由光耦合器等构成,对第2参照光及第2反射光进行合成,将合成后的第2参照光及第2反射光作为第2合成光输出。
[0159]
第2分光部156由衍射光栅等构成,对第2合成部154输出的第2合成光在空间上进行光谱分离,将光谱分离后的第2合成光作为第2光谱分离光来照射。
[0160]
第2光电转换部162a具有呈阵列状排列的光电元件,接受从第2分光部156照射的第2光谱分离光,输出将表示第2合成光的强度的信息与呈阵列状排列的每个光电元件的位置对应起来的第2模拟信号。
[0161]
第2数字转换部172a对第2模拟信号进行a/d转换,将a/d转换后的第2模拟信号作为第2接收信号输出,该第2接收信号是数字信号。
[0162]
实施方式2的光距离测定装置100a通过第2合成部154、第2分光部156、第2光电转换部162a及第2数字转换部172a而构成第2接收部142a。
[0163]
即,第2接收部142a接受第2参照光和第2测定光在对象物20上反射后的光即第2反射光,输出表示第2参照光及第2反射光的第2接收信号。
[0164]
频率测定部181a基于第1接收信号,测定第1参照光及第1反射光的每个频率成分的强度。此外,频率测定部181a输出表示测定出的第1参照光及第1反射光的每个频率成分的强度的第1信号信息。
[0165]
此外,频率测定部181a基于第2接收信号,测定第2参照光及第2反射光的每个频率成分的强度。此外,频率测定部181a输出表示测定出的第2参照光及第2反射光的每个频率成分的强度的第2信号信息。
[0166]
更具体而言,例如,频率测定部181a基于将频率与第1光电转换部161a中的呈阵列状排列的每个光电元件的位置对应起来的信息、以及表示第1接收信号中的与呈阵列状排列的每个光电元件的位置对应的第1合成光的强度的信息,测定第1参照光及第1反射光的每个频率成分的强度。另外,假定第1光电转换部161a中的将频率与呈阵列状排列的每个光电元件的位置对应起来的信息是已知的。此外,同样,频率测定部181a基于将频率与第2光电转换部162a中的呈阵列状排列的每个光电元件的位置对应起来的信息、以及表示第2接收信号中的与呈阵列状排列的每个光电元件的位置对应的第2合成光的强度的信息,测定第2参照光及第2反射光的每个频率成分的强度。另外,假定第2光电转换部162a中的将频率与呈阵列状排列的每个光电元件的位置对应起来的信息是已知的。
[0167]
距离计算部182a基于频率测定部181a输出的第1信号信息或第2信号信息,计算从发送部110a到对象物20的距离。此外,距离计算部182a输出表示计算出的从发送部110a到对象物20的距离的距离信息。
[0168]
更具体而言,距离计算部182a通过与基于作为公知技术的谱域方式的光干涉断层计同样的方法,基于第1信号信息或第2信号信息,计算从发送部110a到对象物20的距离。由于利用基于谱域方式的光干涉断层计进行的距离计测方法是公知的,因此,省略说明。
[0169]
如以上那样,光距离测定装置100a构成为具有:发送部110a,其具有分支部103a、测定光分支部104、参照光分支部105、第1光学系统131及第2光学系统132,其中,该分支部103a对输入的具有多个频率的连续波的激光进行分支,将分支后的激光作为测定光及参照光输出,该测定光分支部104对分支部103a输出的测定光进行分支,将分支后的测定光作为第1测定光及第2测定光输出,该参照光分支部105对分支部103a输出的参照光进行分支,将分支后的参照光作为第1参照光及第2参照光输出,该第1光学系统131具有第1瑞利长度,用于向对象物20照射第1测定光,该第2光学系统132具有与第1瑞利长度不同的第2瑞利长度,并且具有与第1光学系统131所具有的焦距相等的焦距,用于向对象物20照射第2测定光;第1接收部141a,其接受第1参照光和第1测定光在对象物20上反射后的光即第1反射光,输出表示第1参照光和第1反射光的第1接收信号;以及第2接收部142a,其接受第2参照光和第2测定光在对象物20上反射后的光即第2反射光,输出表示第2参照光和第2反射光的第2接收信号,第1接收部141a具有:第1合成部153,其对第1参照光及第1反射光进行合成,将合成后的第1参照光及第1反射光作为第1合成光输出;第1分光部155,其对第1合成部153输出的第1合成光在空间上进行光谱分离,将光谱分离后的第1合成光作为第1光谱分离光来照射;以及第1光电转换部161a,其具有呈阵列状排列的光电元件,接受从第1分光部155照射的第1光谱分离光,将表示第1合成光的强度的信息与每个呈阵列状排列的光电元件的位置对应起来作为第1接收信号输出,第2接收部142a具有:第2合成部154,其对第2参照光及第2反射光进行合成,将合成后的第2参照光及第2反射光作为第2合成光输出;第2分光部156,其对第2合成部154输出的第2合成光在空间上进行光谱分离,将光谱分离后的第2合成光作为第2光谱分离光来照射;以及第2光电转换部162a,其具有呈阵列状排列的光电元件,接受从第2分光部156照射的第2光谱分离光,将表示第2合成光的强度的信息与每个呈阵列状排列的光电元件的位置对应起来作为第2接收信号输出。
[0170]
通过这样构成,光距离测定装置100a能够扩大从发送部110a到对象物20的距离测定的范围,并且能够高精度地测定该距离。
[0171]
另外,本发明在该发明的范围内能够进行各实施方式的自由组合、或者各实施方式的任意的结构要素的变形,或者在各实施方式中能够省略任意的结构要素。
[0172]
产业利用性
[0173]
本发明的光距离测定装置能够应用于加工装置。
[0174]
标号说明
[0175]
10加工装置,11卡盘,12加工头,13加工头移动控制部,14加工头移动机构,15卡盘移动控制部,16卡盘移动机构,20对象物,100、100a光距离测定装置,101激光光源,101a宽频带激光光源,102扫描部,103、103a分支部,104测定光分支部,105参照光分支部,106延迟调整部,110、110a发送部,121第1光环行器,122第2光环行器,131第1光学系统,132第2光学系统,141、141a第1接收部,142、142a第2接收部,151第1光干涉部,152第2光干涉部,153第1合成部,154第2合成部,155第1分光部,156第2分光部,161、161a第1光电转换部,162、162a第2光电转换部,171、171a第1数字转换部,172、172a第2数字转换部,181、181a频率测定部,182、182a距离计算部,190信息发送部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。