技术特征:
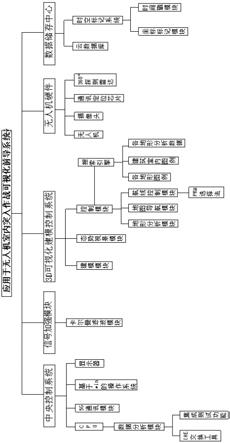
1.一种应用于无人机室内突入作战可视化前导系统,包括中央控制系统、信号加强模块、3d可视化建模控制系统、无人机硬件和数据储存中心,其特征在于:所述中央控制系统包括cpu、5g通讯模块、基于windows的操作系统和显示器,所述cpu中设有数据分析模块,所述5g通讯模块与无人机硬件远程连接,并接收无人机硬件的数据,所述数据分析模块用于分析数据,所述数据储存中心用于储存无人机硬件采集的数据;所述无人机硬件包括无人机、摄像头、通讯定位芯片和360
°
探测雷达,所述通讯定位芯片无线连接5g通讯模块,并实时传输定位数据、摄像头探测影像、360
°
探测雷达探测距离数据;所述3d可视化建模控制系统在基于windows的操作系统中运行,且3d可视化建模控制系统包括建模模块、态势视景模块和控制模块,所述建模模块用于对无人机进行建模,所述态势视景模块连接数据分析模块,接收分析的数据在显示器中进行场景显示,同时将无人机建模显示在场景中,所述控制模块连接互联网,且控制模块包括地形分析模块、地图导航模块和航线控制模块,对场景中的地形进行分析,并推荐地图航线;所述信号加强模块为卡尔曼滤波模块,用于对通讯定位芯片与5g通讯模块的传输信号进行滤波并加强。2.根据权利要求1所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述数据分析模块分析数据后,将数据转化为hl7、ihe、xds国际标准,建立标准数据转换层,把数据结构从不规则转换成规则的,给上层的数据处理和数据交换做基础服务,数据分析模块支持ihe标准,包含ihe交换工具,集成引擎内置集成测试功能,对数据打包输入至数据储存中心进行储存。3.根据权利要求2所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述建模模块基于unity开发平台,利用photoshop对无人机的三视图进行处理,并锐化增加模型纹理,在3ds max中导入三视图,搭建模型,再利用占展uv贴图给飞机模型贴图并渲染,导出无人机模型。4.根据权利要求3所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述态势视景模块基于图像的生成器、基于数据储存中心生成视景,图像的生成器从视点定义并绘制出内容,内容包括图像数据、参数和向量,存储于数据储存中心中,显示器进行视景显示,视景为3d世界的再次呈现,随着时间不断变化的而变化,图形的显示速度跟上用户的视觉感应速度,并在显示器上显示至少每秒10帧的图像,画面更新速度在每秒20到30帧之间。5.根据权利要求4所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述控制模块连接互联网并接入搜索引擎,搜索引擎采用elasticsearch logstash kibana框架部署,且利用elasticsearch搜索服务器完成分布式的多用户全文搜索引擎,该搜索引擎中包括各地形图例、建筑室内图例和各地形分析数据。6.根据权利要求5所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述地形分析模块接入搜索引擎在显示器上实时显示当前态势视景模块所显示场景的地形数据,并根据实际地形获得并显示分析数据,推荐地图航线,所述地图导航模块连接通讯定位芯片对无人机进行定位,并在显示器上显示无人机当前在地图上的位置,以及对地图的漫游、放大和缩小操作,所述航线控制模块用于对无人机的航线进行规划,并在显示器
上对规划好的航线进行显示,飞行前设置威胁进行离线全局规划的航迹显示,人工插入突发威胁干预飞机飞行。7.根据权利要求6所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述航线控制模块中设有prm选择法,prm选择法为随机的路径搜索方法,在地形分析模块获得分析数据后,一旦遇到威胁,且人工没有进行突发干预的时候,那么在环境已知时,进行随机选择路径规划,并在该区域的场景显示中留下路标。8.根据权利要求1所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述卡尔曼滤波模块中,通过计算双差观测值来消除通讯定位芯片和5g通讯模块的钟差,并将对应于通讯定位芯片和5g通讯模块的伪距测量值组成双差伪距,利用双差载波相位来平滑相应的双差伪距,从而降低双差伪距观测值的测量噪声,被平滑或滤波后的双差伪距观测值既有低的测量噪声,又保持着无整周模糊度的优点,同时,在进行定位时,采用卡尔曼滤波法计算出包含了基线向量与各个频点的单差整周模糊度值,转化为双差整周模糊度后,通过lambda算法经过进一步的线性变换得到每个频点所对应的双差整周模糊度值,以此提高通讯定位芯片和5g通讯模块之间信号传递的时效性和准确性。9.根据权利要求1所述的一种应用于无人机室内突入作战可视化前导系统,其特征在于:所述数据储存中心包括云数据库和时空标记系统,所述云数据库用于储存数据分析模块分析后的数据,所述时空标记系统包括坐标标记模块和时间戳模块,所述坐标标记模块用于给检测硬件系统采集的数据标上坐标位置,所述时间戳模块用于给检测硬件系统实时采集的数据标上时间。
技术总结
本发明提供了一种应用于无人机室内突入作战可视化前导系统,涉及无人机技术领域,包括中央控制系统、信号加强模块、3D可视化建模控制系统、无人机硬件和数据储存中心,其特征在于:所述中央控制系统包括CPU、5G通讯模块、基于Windows的操作系统和显示器;本发明通过摄像头探测影像、360
技术研发人员:郑潇华 闵雪生 王武 徐润统 邱枫
受保护的技术使用者:湖州市公安局特警支队
技术研发日:2021.06.28
技术公布日:2021/11/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。