基于图像增强与多重检测的sar图像舰船目标快速检测方法
技术领域
1.本发明属于雷达图像检测技术领域,具体涉及一种基于图像增强与多重检测的sar图像舰船目标快速检测方法。
背景技术:
2.合成孔径雷达(synthetic aperture radar,sar)作为一种微波有源成像系统,具有全天时、全天候工作的特点。它在距离向依靠发射大带宽线性调频信号,得到距离向的高分辨;在方位向根据合成孔径原理,通过对载机在不同方位位置形成“合成阵列”录取的回波信号进行相干积累,从而获取方位向的高分辨。由于sar成像不受气象条件限制,而且不分白昼与黑夜,均能够提供高分辨的对地观测图像。
3.舰船目标检测作为海洋自动目标检测(automatic target recognition,atr) 系统的第一阶段,是后续有效识别的基础。
4.使用sar图像数据进行海洋上的舰船检测受到越来越多的关注。
5.由于雷达成像几何、电磁散射机理的复杂性和海面中舰船目标的无规则摇摆、目标之间相隔太近导致相互遮挡干扰等原因,会造成雷达图像中舰船目标结构轮廓残缺或结构不完整、十字模糊、旁瓣过高导致图像中存在十字交叉现象等不利于检测的因素。因此,进行舰船目标检测方法的研究,具有重要的理论与应用价值。
6.sar图像中舰船目标的检测主要根据sar图像中背景杂波和船舶目标在多分辨率、相位特征、极化特征及灰度特征的差异性来进行检测,其中利用灰度差异性进行检测的算法应用最多。从具体的舰船检测手段可以分为两种:第一种是直接对舰船检测,另一种是根据舰船航行的轨迹来进行检测。
7.直接进行sar图像舰船检测的方法基于sar图像的特征可以分为:基于灰度特征的方法、基于多分辨率特征的方法、基于极化特征的方法、基于相位特征的方法等。其中,基于灰度特征的方法可分为简单的阈值分割方法、恒虚警率(cfar)方法、基于模板的方法、似然比检测方法;基于多分辨率特征方法主要是基于小波分解的方法;基于极化特征的方法主要有基于极化分解的方法;基于相位特征的方法主要有基于相位信息的方法。在上述各种方法中,cfar方法在单通道sar图像中应用较多,可以控制虚警率,并且算法简单容易实现;基于分割的方法可以联合cfar达到较好的检测性能;基于小波分解的方法主要是利用了杂波背景和舰船目标在多分辨特征的差异性,其效率比较低,主要应用在高分辨率sar图像上。
技术实现要素:
8.为了解决现有技术中存在的上述问题,本发明提供了一种基于图像增强与多重检测的sar图像舰船目标快速检测方法。本发明要解决的技术问题通过以下技术方案实现:
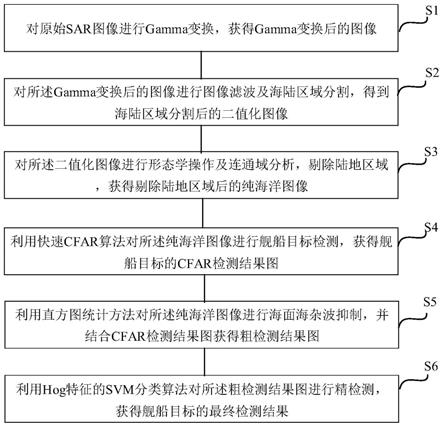
9.本发明提供了一种基于图像增强与多重检测的sar图像舰船目标快速检测方法,包括:
10.s1:对原始sar图像进行gamma变换,获得gamma变换后的图像;
11.s2:对所述gamma变换后的图像进行图像滤波及海陆区域分割,得到海陆区域分割后的二值化图像;
12.s3:对所述二值化图像进行形态学操作及连通域分析,剔除陆地区域,获得剔除陆地区域后的纯海洋图像;
13.s4:利用快速cfar算法对所述纯海洋图像进行舰船目标检测,获得舰船目标的cfar检测结果图;
14.s5:利用直方图统计方法对所述纯海洋图像进行海面海杂波抑制,并结合cfar检测结果图获得粗检测结果图;
15.s6:利用hog特征的svm分类算法对所述粗检测结果图进行精检测,获得舰船目标的最终检测结果。
16.在本发明的一个实施例中,所述s1包括:
17.s11:获取待处理的原始sar图像;
18.s12:获取所述原始sar图像中海洋区域的像素值均值;
19.s13:根据所述像素值均值的大小设置gamma变换的参数γ;
20.s14:利用参数γ对原始sar图像进行gamma变换,获得gamma变换后的图像:
[0021][0022]
其中,x
i,j,0
为原始sar图像中第i行第j列的像素点的像素值,x
i,j,1
为 gamma变换后的图像中第i行第j列的像素点的像素值,a为gamma变换的常数。
[0023]
在本发明的一个实施例中,所述s2包括:
[0024]
s21:对所述gamma变换后的图像i’进行归一化处理,获得归一化后的图像;
[0025]
s22:依次使用中值滤波算法和均值滤波算法对归一化后的图像进行图像滤波,获得滤波后图像;
[0026]
s23:利用改进的最大类间方差算法对所述滤波后图像进行海陆区域分割,得到海陆区域分割后的二值化图像。
[0027]
在本发明的一个实施例中,所述s23包括:
[0028]
s231:利用传统最大类间方差算法获取所述滤波后图像中陆地区域和海洋区域的分割阈值t;
[0029]
s232:对所述传统最大类间方差算法进行了改进,获得了改进的最大类间方差算法的阈值t
′
:
[0030]
t
′
=t t*σ,
[0031]
其中,t表示改进的最大类间方差算法的权值系数,σ表示滤波后图像的标准差;
[0032]
s233:利用阈值t
′
对滤波后图像进行海陆区域分割,得到海陆区域分割后的二值化图像:
[0033][0034]
其中,x
i,j,3
表示所述滤波后图像中第i行第j列的像素点的像素值,x
i,j,4
表示获得
的二值化图像中第i行第j列的像素点的像素值。
[0035]
在本发明的一个实施例中,所述s3包括:
[0036]
s31:对所述二值化图像依次进行闭操作和开操作;
[0037]
s32:利用连通域分析算法对开操作后的二值化图像进行连通域分析,将大于预设最小陆地面积的连通域保留下来得到陆地掩膜图像;
[0038]
s33:将所述陆地掩膜图像与进行图像滤波后的图像进行非操作,获得剔除陆地区域后的图像。
[0039]
在本发明的一个实施例中,所述s4包括:
[0040]
s41:获取海陆区域分割后的二值化图像i
bw
;
[0041]
s42:利用所述二值化图像i
bw
获得背景窗内杂波统计矩阵a:
[0042]
a=ifft2(h*fft2(i
bw
)),
[0043]
其中,fft2(
·
)和ifft2(
·
)分别为二维傅立叶变换和二维逆傅立叶变换函数,h为二维频域滤波矩阵;
[0044]
s43:利用所述二值化图像i
bw
与所述原始sar图像i,获得背景窗内杂波均值统计矩阵b:
[0045][0046]
其中,
[0047]
s44:根据矩阵和所述背景窗内杂波均值统计矩阵b,获取背景窗内杂波方差统计矩阵v:
[0048][0049]
s45:根据所述背景窗内杂波均值统计矩阵b和所述背景窗内杂波均值统计矩阵v,获得判定矩阵f:
[0050]
f=φ
‑1(1
‑
p
fa
)
×
v b,
[0051]
其中,p
fa
表示虚警率,φ
‑1(
·
)表示标准正态分布函数φ(
·
)的反函数;
[0052]
s46:将所述原始sar图像i与所述判定矩阵f中的像素值逐个进行比较,获得舰船目标的cfar检测结果图,表达式为:
[0053][0054]
其中,ii(i,j)表示所获得的cfar检测结果图中(i.j)像素点坐标,i(i,j) 表示原始sar图像i中(i.j)像素点坐标,f(i,j)表示判定矩阵f中(i.j)像素点坐标,i(i,j)>f(i,j)表示(i.j)对应像素点为检测到的舰船目标像素, i(i,j)<f(i,j)表示(i.j)对应像素点不为检测到的舰船目标像素, i=1,2,
…
,m;j=1,2,
…
,n。
[0055]
在本发明的一个实施例中,所述s5包括:
[0056]
s51:对剔除陆地区域后的纯海洋图像统计在100
‑
255范围内每个值包括的像素点个数并获得直方图;
[0057]
s52:对所述直方图使用传统最大类间方差算法获得海杂波分割阈值;
[0058]
s53:将小于所述海杂波阈值的像素点归类为海杂波,像素值取1,大于所述海杂波阈值的像素点归类为舰船目标,像素值取0,获得分割结果图;
[0059]
s54:将所述分割结果图与所述cfar检测结果图进行与操作,得到粗检测结果图。
[0060]
在本发明的一个实施例中,所述s6包括:
[0061]
s61:将所述粗检测结果图中的疑似目标进行切片,获得包括疑似目标的切片图像,并获得所述切片图像的梯度图;
[0062]
s62:将所述切片图像的梯度图划分多个单元格,根据梯度方向的角度大小获得单元格内梯度方向直方图;
[0063]
s63:对所述单元格分块进行梯度归一化,并组成一维特征向量;
[0064]
s64:将所述一维特征向量输入到经训练的高斯核svm分类器中进行判别,得到最终精检测结果。
[0065]
本发明的另一方面提供了一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序用于执行上述实施例中任一项所述的sar图像舰船目标快速检测方法的步骤。
[0066]
本发明的另一方面提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时实现如上述实施例中任一项所述sar图像舰船目标快速检测方法的步骤。
[0067]
与现有技术相比,本发明的有益效果在于:
[0068]
1、本发明基于图像增强与多重检测的sar图像舰船目标快速检测方法能够快速精确地对sar图像进行舰船目标检测,且具有较低的虚警率。
[0069]
2、由于sar雷达成像的成像机理,对于不同场景中的海陆交界处陆地的回波强度差距很大,此时传统的otsu算法无法准确进行海陆分割。本发明方法使用gamma变换调整sar图像的对比度来增强陆地区域的散射强度,同时使用改进的otsu算法对sar图像进行更加准确地海陆分割,从而有效提高提高海陆分割准确度与鲁棒性。
[0070]
3、复杂的目标场景中海洋杂波强度很高,在海况较大时sar图像中能清晰的观察到海浪线。传统的cfar算法在复杂的海洋背景中会将海杂波检测为目标,从而产生大量的虚警。本发明的方法提出一种海洋杂波抑制算法,通过自适应阈值来抑制海洋杂波,并且通过融合cfar检测结果与海洋杂波抑制算法结果来降低cfar检测中的虚警率。
[0071]
以下将结合附图及实施例对本发明做进一步详细说明。
附图说明
[0072]
图1是本发明实施例提供的一种基于图像增强与多重检测的sar图像舰船目标快速检测方法的流程图;
[0073]
图2是本发明实施例提供的一种基于高斯分布的快速cfar算法的流程图;
[0074]
图3a是本发明实施例提供的一种原始sar图像;
[0075]
图3b是图3a的sar图像的海陆分割结果图;
[0076]
图3c是图3a的sar图像的快速cfar结果图;
[0077]
图3d是图3a的sar图像的舰船目标的最终检测结果。
具体实施方式
[0078]
为了进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及具体实施方式,对依据本发明提出的基于图像增强与多重检测的sar图像舰船目标快速检测方法进行详细说明。
[0079]
有关本发明的前述及其他技术内容、特点及功效,在以下配合附图的具体实施方式详细说明中即可清楚地呈现。通过具体实施方式的说明,可对本发明为达成预定目的所采取的技术手段及功效进行更加深入且具体地了解,然而所附附图仅是提供参考与说明之用,并非用来对本发明的技术方案加以限制。
[0080]
应当说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的物品或者设备中还存在另外的相同要素。
[0081]
实施例一
[0082]
请参见图1,图1是本发明实施例提供的一种基于图像增强与多重检测的sar图像舰船目标快速检测方法的流程图。
[0083]
该方法具体包括以下步骤:
[0084]
s1:对原始sar图像进行gamma变换,获得gamma变换后的图像。
[0085]
具体地,获取m
×
n维的原始sar图像i,其中,m、n分别表示原始sar图像i长度方向的像素个数和宽度方向的像素个数;将所述原始 sar图像中海洋区域的像素值累加并除以海洋区域的像素点个数,从而获得海洋区域的像素值均值,根据所述像素值均值设置gamma变换的参数γ,具体对应关系如表1:
[0086]
表1原始sar图像中海洋区域不同像素值均值范围对应的γ值
[0087]
均值范围[0,10][10,20)[20,30)[30,40)[40, ∞)γ值0.611.21.52
[0088]
利用所述参数γ对原始sar图像i进行gamma变换,获得gamma变换后的图像i’,具体变换公式为:
[0089][0090]
其中,x
i,j,0
为原始sar图像i中第i行第j列的像素点的像素值,x
i,j,1
为gamma变换后的图像i’中第i行第j列的像素点的像素值,a表示gamma变换的常数,通常设置为1。
[0091]
本步骤通过使用gamma变换调整原始sar图像的对比度,可以增强图像中陆地区域的散射强度,以使后续海陆分割得到更加精确、鲁棒的结果。
[0092]
s2:对gamma变换后的图像进行图像滤波及二值化处理,得到海陆区域分割后的二值化图像。
[0093]
首先,对gamma变换后的图像i’进行归一化处理,获得归一化后的图像,然后对归一化后的图像进行图像滤波,获得滤波后图像;之后使用改进的最大类间方差算法对所述滤波后图像中反射强度较大的陆地区域与反射强度较小区域的海域进行分离。
[0094]
进一步地,步骤s2包括以下几步:
[0095]
s21:对gamma变换后的图像i’进行归一化处理,获得归一化后的图像。
[0096]
具体地,获取gamma变换后的图像i’的像素最大值x
max
,并根据所述像素最大值x
max
计算图像归一化因子δ:
[0097]
δ=255/x
max
,
[0098]
对图像i’中每个像素点的像素值进行归一化处理,使得图像的像素最大值归一化为255:
[0099]
x
i,j,2
=δ*x
i,j,1
[0100]
其中,x
i,j,1
为gamma变换后的图像i’中第i行第j列的像素点的像素值,x
i,j,2
为归一化后图像中每个像素点的像素值。
[0101]
s22:依次使用中值滤波算法和均值滤波算法对归一化后的图像进行图像滤波,获得滤波后图像。
[0102]
具体地,首先使用滑动窗口大小为5
×
5的中值滤波算法对归一化后的图像进行中值滤波,然后使用滑动窗口大小为5
×
5的均值滤波算法对中值滤波后的图像进行均值滤波,获得滤波后图像。
[0103]
s23:利用改进的最大类间方差算法对所述滤波后图像进行海陆区域分割,得到海陆区域分割后的二值化图像。
[0104]
具体地,所述s23包括:
[0105]
s231:利用传统最大类间方差算法(otsu)获取所述滤波后图像中陆地区域和海洋区域的分割阈值t;
[0106]
具体地,所述传统最大类间方差算法的流程如下:
[0107]
设定陆地区域(较亮的区域)和海洋区域(较暗的区域)的分割阈值为t;属于陆地区域的像素点数占整幅图像的比例记为ω0,平均灰度为μ0;属于海洋区域的像素点数占整幅图像的比例为ω1,平均灰度为μ1;整幅图像的平均灰度记为μ。假设图像大小为m
×
n,图像中像素的灰度值小于阈值t 的像素点个数为n0,像素灰度值大于阈值t的像素个数为n1,则存在以下关系:
[0108][0109][0110]
n0 n1=m
×
n
[0111]
ω0 ω1=1
[0112]
μ=ω0*μ0 ω1*μ1,
[0113]
其中,p(c0)表示图像像素是陆地区域的概率,p(c1)表示图像像素是海洋区域的概率。
[0114]
根据以上关系式,由所述分割阈值t分割出来的陆地区域和海洋区域两个类各自的方差为:
[0115][0116][0117]
其中,表示陆地区域的方差,表示海洋区域的方差,l表示累加中像素点的序号,k表示图像中有k个像素的陆地区域,p
l
表示每个像素占整幅图像的比例,就是图像像素值个数的倒数,g表示图像中所有像素的个数。
[0118]
设陆地区域和海洋区域的类内方差为类间方差为总方差为其计算方式如下式:
[0119][0120][0121][0122]
同时存在以下关系:
[0123][0124]
由上面公式可知,总方差是一个与分割阈值t无关的常量值,因此求解最小类内方差的阈值就可以等价转换为求解最大类间方差的阈值。
[0125]
由于归一化且滤波后的图像像素值为整数,且范围在0
‑
255之间,因此可以将t遍历0
‑
255,计算出不同t值对应的类间方差值,取其中最大类间方差值对应的t值就是要求解的阈值。需要说明的是,这里所说的“将t 遍历0
‑
255”,指将t的值从0开始一直取到255,一共256个整数,对这不同的t计算对应的256个类间方差此时类间方差最大时对应的t的值,就是计算得到的最大类间方差的阈值。
[0126]
在本实施例中,对传统最大类间方差算法进行了算法改进,获得了改进的最大类间方差算法(otsu)。
[0127]
具体地,在得到传统最大类间方差算法的阈值t后,获得改进的otsu 算法的阈值t
′
:
[0128]
t
′
=t t*σ,
[0129]
其中,t表示改进的otsu算法的权值系数,通常设置为2,σ表示所述滤波后图像的标准差。
[0130]
进一步地,使用改进的otsu算法的阈值t
′
作为阈值,对滤波后图像进行海陆区域分割,得到海陆区域分割后的二值化图像:
[0131]
[0132]
其中,x
i,j,3
表示所述滤波后图像中第i行第j列的像素点的像素值, x
i,j,4
表示获得的二值化图像中第i行第j列的像素点的像素值。x
i,j,4
=0表示此像素点属于海洋区域,x
i,j,4
=1表示此像素点属于陆地区域。
[0133]
s3:对所述二值化图像进行形态学操作及连通域分析,剔除陆地区域,获得剔除陆地区域后的纯海洋图像。
[0134]
具体包括如下步骤:
[0135]
s31:对所述二值化图像进行闭操作,即先对图像进行膨胀,再进行腐蚀;然后对图像进行开操作,即先对图像进行腐蚀,再进行膨胀。
[0136]
s32:利用连通域分析算法对经过步骤s31开操作后的二值化图像进行连通域分析,根据得到的面积信息,将大于预设的最小陆地面积的连通域保留下来,得到陆地掩膜图像,用于根据所述陆地掩膜图像剔除所述二值化图像中的陆地区域。
[0137]
具体地,步骤s32包括:
[0138]
本实施例的连通域分析算法使用了8连通域的遍扫描法,其大概思路是通过两次遍历(two
‑
pass),就可以将图像中存在的所有连通区域找出并标记,具体步骤如下:
[0139]
(a)逐行扫描图像,把每行中连续出现的像素值为1的像素点组成一个序列,称为团,记下每个团的起点、终点和它所在的行号;
[0140]
(b)除了第一行外,每一行先查看是否有与上一行相连通的团,如果该团只与上一行的一个团相互连通,则该团的标号应与上一行的团的标号相同;如果该团与上一行两个及以上的团相互连通,则该团标号应选上一行的连通的团中最小的团标,并且将上一行的这几个团的标记记入等价对,等价对就是表示两个团同属于一个连通域但是在第一步中被赋予了两个不同的标号;
[0141]
(c)将等价对转换为等价序列,然后从1开始,给每个等价序列一个标号,等价序列内的标号相同;
[0142]
(d)再遍历开始团的标号,查找等价序列,赋给他们新的标号;
[0143]
(e)将每个团的标号填入新的矩阵中,完成连通域分析。
[0144]
经过连通域分析后可以得到各个连通域的面积信息,将其中面积大于预设的最小陆地面积的亮斑作为陆地区域保存下来,得到陆地掩膜图像。
[0145]
s33:将所述陆地掩膜图像与进行图像滤波后的图像(即所述滤波后图像) 进行非操作,获得剔除陆地区域后的纯海洋图像。
[0146]
s4:利用快速cfar(constant false
‑
alarm rate,恒虚警率)算法对所述纯海洋图像进行舰船目标检测,获得舰船目标的cfar检测结果图。
[0147]
假定海域场景杂波服从高斯分布,基于高斯分布的快速cfar算法的流程图如图2所示,其中,w表示所述背景窗内杂波均值统计矩阵b的取倒矩阵。在本实施例中,步骤s4具体包括:
[0148]
s41:首先对雷达回波数据进行成像处理,得到sar图像i,随后利用步骤s2所述的改进的最大类间方差算法获得海陆分割后的二值化图像i
bw
;
[0149]
s42:将二值化图像i
bw
进行二维傅立叶变换操作,得到二维傅立叶变换矩阵s(i,j);将矩阵s(i,j)与二维频域滤波矩阵h进行点乘,获得点乘后的矩阵s1(i,j)中;将矩阵s1(i,j)进行二维逆傅立叶变换,得到背景窗内杂波统计矩阵a;将背景窗内杂波统计矩阵a中
对应的每个元素分别进行取倒操作,得到取倒矩阵用于统计背景窗内杂波的均值和方差,其中,(i,j)为对应像素点坐标(i=1,2,
…
,m;j=1,2,
…
,n)。
[0150]
在本实施例中,设置矩阵元素全为1的矩阵,将矩阵进行二维傅立叶变换,获得二维频域滤波矩阵h。
[0151]
进一步地,所述背景窗内杂波统计矩阵a的计算表达式为:
[0152]
a=ifft2(h*fft2(i
bw
)),
[0153]
其中,fft2(
·
)和ifft2(
·
)分别为二维傅立叶变换和二维逆傅立叶变换函数。
[0154]
取倒矩阵的计算表达式为:
[0155][0156]
s43:根据所述二值化图像i
bw
与所述原始sar图像i,获得背景窗内杂波均值统计矩阵b。
[0157]
具体地,将所述二值化图像i
bw
与所述原始sar图像i点乘,获得矩阵 s
′
(i,j);将矩阵s
′
(i,j)进行二维傅立叶变换,获得二维傅立叶变换矩阵 s
′1(i,j);将所述二维傅立叶变换矩阵s
′1(i,j)与二维频域滤波矩阵h进行点乘,获得矩阵s
′2(i,j);将矩阵s
′2(i,j)进行二维逆傅立叶变换,获得矩阵s
′3(i,j);将矩阵s
′3(i,j)与矩阵进行点乘,得到背景窗内杂波均值统计矩阵b,所述背景窗内杂波均值统计矩阵b的表达式为:
[0158][0159]
其中,fft2(
·
)和ifft2(
·
)分别为二维傅立叶变换和二维逆傅立叶变换函数。
[0160]
s44:根据所述二值化图像i
bw
与所述原始sar图像i,获取背景窗内杂波方差统计矩阵v。
[0161]
具体地,将所述二值化矩阵i
bw
与所述原始sar图像i点乘,获得矩阵 s
′
(i,j),将矩阵s
′
(i,j)进行平方操作,获得矩阵s
′4(i,j);将矩阵s
′4(i,j)进行二维傅立叶变换,获得矩阵s
′5(i,j);将矩阵s
′5(i,j)与二维频域滤波矩阵h进行点乘,获得矩阵s
′6(i,j);将矩阵s
′6(i,j)进行二维逆傅立叶变换,获得矩阵 s
′7(i,j);将矩阵s
′7(i,j)与取倒矩阵进行点乘,获得矩阵s
′8(i,j);将矩阵 s
′8(i,j)减去矩阵b的平方,获得s
′9(i,j);最后对矩阵s
′9(i,j)求平方根,最终获取背景窗内杂波方差统计矩阵v。具体地,所述背景窗内杂波均值统计矩阵v的表达式为:
[0162][0163]
s45:根据所述背景窗内杂波均值统计矩阵b和所述背景窗内杂波均值统计矩阵v,获得判定矩阵f。
[0164]
在本实施例中,所述s45包括以下步骤:
[0165]
s451:根据给定虚警率求得目标检测阈值。
[0166]
具体地,假定背景杂波服从高斯分布,其概率密度函数为:
[0167]
[0168]
其中,x表示图像中每个像素的像素值,u表示杂波的均值,σ表示杂波的标准差。
[0169]
则背景杂波累计积分函数可以表示为:
[0170][0171]
其中,t表示积分中的变量。
[0172]
作变量代换则:
[0173][0174]
其中,φ(
·
)是标准正态分布函数。
[0175]
进一步地,给定虚警率p
fa
,则可以求得所述快速cfar算法判断是否是舰船的检测阈值t
cfar
,计算公式为:
[0176][0177]
简化可得:
[0178][0179]
从而可得:
[0180]
t
cfar
=φ
‑1(1
‑
p
fa
)
×
σ u
[0181]
其中,φ
‑1(
·
)表示φ(
·
)的反函数。
[0182]
s452:根据所述检测阈值t
cfar
求得判定矩阵f,计算公式为:
[0183]
f=φ
‑1(1
‑
p
fa
)
×
v b。
[0184]
s46:将原始sar图像i与所述判定矩阵f逐个进行像素值比较,获得舰船目标的cfar检测结果图,表达式为:
[0185][0186]
其中,ii(i,j)表示所获得的cfar检测结果图中(i.j)像素点坐标,i(i,j) 表示原始sar图像i中(i.j)像素点坐标,f(i,j)表示判定矩阵f中(i.j)像素点坐标,i=1,2,
…
,m;j=1,2,
…
,n,i(i,j)>f(i,j)表示(i.j)对应像素点为检测到的舰船目标像素,i(i,j)<f(i,j)表示(i.j)对应像素点不为检测到的舰船目标像素。记录满足以上判定条件的所有元素各自对应的像素,完成舰船目标的检测,获得舰船目标的cfar检测结果图ii,该cfar检测结果图ii为二值图像。
[0187]
s5:利用直方图统计方法对所述纯海洋图像进行海面海杂波抑制,并结合cfar检测结果图获得粗检测结果图。
[0188]
具体地,首先对步骤s3获得的剔除陆地区域后的纯海洋图像在 100~255范围内做直方图统计,具体为统计在该范围内每个值有多少个像素点并获得直方图;随后对得到的直方图使用所述传统最大类间方差算法求得一个分割阈值;最后将小于该阈值的像素点
归类为海杂波,像素值取1,大于该阈值的像素点归类为疑似目标,像素值取0,这里所述的疑似目标包括舰船目标和小的岛屿目标,获得分割结果图;之后,将该分割结果图与步骤s4中获得的cfar检测结果图进行与操作,得到的结果图即为粗检测结果图。
[0189]
s6:利用hog特征的svm分类算法对所述粗检测结果图进行精检测,获得舰船目标的最终检测结果。
[0190]
具体地,所述s6包括:
[0191]
s61:将所述粗检测结果图中的疑似目标进行切片,获得包括疑似目标的切片图像,并获得所述切片图像的梯度图;
[0192]
首先,将粗检测结果图中的疑似目标进行切片,获得包括疑似目标的切片图像,由于疑似目标的大小可能不同,因此,切片图像的大小也不相同。随后,将所述切片图像大小均缩放到64*64,然后计算切片图像的梯度图,梯度的计算如下式:
[0193]
g
i
(i,j)=i(i 1,j)
‑
i(i
‑
1,j)
[0194]
g
j
(i,j)=i(i,j 1)
‑
i(i,j
‑
1)
[0195][0196][0197]
其中,i、j代表图像的行和列,i(i,j)指图像在(i,j)处的像素值,g
i
(i,j) 指图像在(i,j)处的水平梯度,g
j
(i,j)指图像在(i,j)处的垂直梯度,g(i,j)表示图像在(i,j)处的梯度值,α(i,j)表示图像在(i,j)处的梯度方向(取0~180 度)。
[0198]
s62:将所述切片图像的梯度图划分多个单元格,根据梯度方向的角度大小获得单元格内梯度方向直方图;
[0199]
将得到的64*64大小的梯度图按8*8大小分成32*32个单元格,然后将0~180
°
分为9段来统计单元格内的梯度方向直方图,如:梯度方向为0~20
°
统计为0
°
、梯度方向为20~40
°
统计为20
°
等等,最后将单元格内梯度方向统计完后将相同的梯度方向的值累加在一起,即得到梯度方向直方图。
[0200]
s63:对所述单元格分块进行梯度归一化,并展开成一维特征向量。
[0201]
将所有单元格按2*2组成一个块(block),即,每个块中包含2*2=4个单元格,在块内对4个单元格进行梯度归一化,然后按照像素点顺序,将每个单元格的梯度直方图拼接成一个长度为1764的一维特征向量。
[0202]
s64:将所述一维特征向量输入到经训练的高斯核svm分类器中进行判别,得到舰船目标的最终精检测结果。
[0203]
svm分类器能够有效地对舰船目标进行检测,但是当需要检测的目标增多时,svm分类器的耗时将会大大增加,因此本发明提出使用cfar算法进行粗检测、svm算法对粗检测结果进行精检测的处理过程来提高整体算法的实时性。首先使用cfar算法对sar图像中的舰船目标进行粗检测,得到少量疑似目标,然后通过svm分类器对疑似目标进行检测,就可以得到最终的检测结果。
[0204]
在本实施例中,训练基于hog特征的svm分类器使用的训练集和测试集共有4516张图片,其中训练集、测试集的正负样本数如表2:
[0205]
表2svm分类器使用的训练参数
[0206] 正样本数负样本数训练集17191765测试集573589总样本数22922354
[0207]
以下通过实验对本发明实施例的sar图像舰船目标快速检测方法的效果进行进一步说明。
[0208]
本实验采用gf
‑
3卫星中qpsi模式的hh极化实测sar数据对本发明实施例的sar图像舰船目标快速检测方法进行验证,图像方位向与距离向的分辨率均为8米。原始sar图像大小均在5000*5000像素以上。
[0209]
请参见图3a至图3d,以及表3,图3a是本发明实施例提供的一种原始sar图像;图3b是图3a的sar图像的海陆分割结果图;图3c是图3a 的sar图像的快速cfar结果图;图3d是图3a的sar图像的舰船目标的最终检测结果,表3列出了使用24张gf
‑
3卫星测试图像对本发明实施例的sar图像舰船目标快速检测方法的测试结果。
[0210]
表3本发明实施例的sar图像舰船目标快速检测方法的测试结果
[0211][0212]
从图3a中可以看出,海陆交界处有很多陆地区域的反射强度较弱,如果在海陆分割时不能将这些区域剔除,会在后续检测中增加很多虚警,并且增加算法的处理时长;从图3b中可以看出,本发明实施例所提方法能够有效完成海陆分割任务,同时将海面中的船只完整的保留下来;从图3c中可以看出,通过融合海洋杂波抑制算法能有效减少cfar检测中的虚警目标,同时完整保留了图像中的舰船目标,提高了整体算法的实时性;从图3d中可以看出, svm分类器能够有效的将粗检测结果中的疑似目标进行精检测,提高了整体算法的检测精度、降低了算法的虚警率。
[0213]
从表3可以看出,本发明实施例的方法具有较高的检测率与较低的虚警率,通过结合粗检测与精检测过程,可以快速有效完成海陆交界处、纯海面的舰船目标检测任务。
[0214]
本实施例基于图像增强与多重检测的sar图像舰船目标快速检测方法能够快速精确地对sar图像进行舰船目标检测,且具有较低的虚警率。由于sar雷达成像的成像机理,对于不同场景中的海陆交界处陆地的回波强度差距很大,此时传统的otsu算法无法准确进行海陆分割。本发明方法使用 gamma变换调整sar图像的对比度来增强陆地区域的散射强度,同时使用改进的otsu算法对sar图像进行更加准确地海陆分割,从而有效提高提高海陆分割准确度与鲁棒性。此外,复杂的目标场景中海洋杂波强度很高,在海况较大时sar图像中能清晰的观察到海浪线。传统的cfar算法在复杂的海洋背景中会将海杂波检测为目标,从而产生大量的虚警。本发明的方法提出一种海洋杂波抑制算法,通过自适应阈值来抑制海洋杂波,并且通过融合 cfar检测结果与海洋杂波抑制算法结果来降低cfar检测中的虚警率。
[0215]
本发明的又一实施例提供了一种存储介质,所述存储介质中存储有计算机程序,
所述计算机程序用于执行上述实施例中所述的sar图像舰船目标快速检测方法步骤。本发明的再一方面提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时实现如上述实施例所述sar图像舰船目标快速检测方法的步骤。具体地,上述以软件功能模块的形式实现的集成的模块,可以存储在一个计算机可读取存储介质中。上述软件功能模块存储在一个存储介质中,包括若干指令用以使得一台电子设备(可以是个人计算机,服务器,或者网络设备等)或处理器(processor)执行本发明各个实施例所述方法的部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read
‑
only memory, rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
[0216]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。