1.本公开涉及用于将一种或多种流体精确地分配到衬底的精准区域上或精准区域中以对限定到衬底的精准区域的样本实行分析或者在衬底的预定区域中构建材料层的装置及方法,尤其涉及一种流体喷射头、数字分配装置及分配方法。
背景技术:
2.例如喷墨装置等装置可将非常小的墨小滴(常常以微微升(picoliter)测量)分配到衬底上。对于喷墨打印应用,所沉积的墨的体积是相对低的量,且所述体积不像例如颜色匹配及打印品质等其他因素一样重要。典型的喷墨打印机局限于沉积约2μl/cm2到约3μl/cm2。典型的喷墨打印头可具有一个或多个流体供应通孔,所述一个或多个流体供应通孔各自与不同颜色的喷射头相关联,其中喷射头可设置在单个衬底上(如图1中所示)或多个衬底上。将喷射头定位在单个衬底上具有降低喷射头的成本的优点。用于喷墨打印机的典型的打印头10具有流体喷射器12a到12d的阵列,所述阵列被定向为与箭头14所示的打印头10的行进方向(x方向)垂直(在y方向上)。
3.然而,对于需要将精确量的流体分配到介质上或介质中的其他应用,流体体积是极为重要的和/或关键的因素。对于某个应用,指定一定体积的流体沉积到指定区域中或指定区域之上可为有利的。一个实例可为将包含单个胞元的单滴流体分配到微井板(well
‑
plate)的井(well)中。另一实例可为将大量流体小滴分配到小区域中,例如填充微井板中的384个井中的每一者。因此,沉积到微井板的井中的流体的密度可能需要分配大于250μl/cm2的流体。同样,将流体沉积到载玻片上以分析载玻片上的样本需要在载玻片的指定区域之上沉积量经过严格控制的流体。
4.特别是在医学领域,需要自动化的样本制备及分析。分析可为比色分析,或者可要求对样本进行染色,以便在显微镜下更好地观察样本。此种分析可包括药物样本分析、血液样本分析等。举例来说,在血液分析中,血液被分析以提供用于确定个体健康的许多不同因素。当有大量患者需要血液样本分析时,所述流程可能极为耗时。另外,需要精确地制备样本,以便使结果可靠。存在需要医学领域及其他领域中的样本分析的许多其他情形,所述样本分析可受益于使用提供精确及可重现结果的分析仪器(例如,对多个样本的微量滴定(micro
‑
titration))。
5.微井板、载玻片及其他衬底用于许多实验及实验室流程。填充井或对点(spotting)的过程常常是手动实行的,或者使用昂贵的实验室装备。在一些情形中,井中填充有手动操作式移液管(hand operated pipette)。在其他情形中,基于移液管技术的高端自动化装置用于填充微井板。此种自动化装置只容置敞开式井分配头(open well dispense head)。敞开式井分配头是一种分配头,其中在使用前必须将少量流体沉积到所述分配头中的开口中。流体通常使用移液管或相似手段手动沉积。分配头保持静止,同时在x方向与y方向二者上移动微井板。这些高端装置极为昂贵。
6.在微电路制造领域,需要在精准位置中分配流体,以在衬底上提供电路装置。每单
位面积分配的流体体积通常比传统喷墨印刷技术所可提供的大得多。在一些情形中,不同的流体在衬底上组合在一起,以对流体提供化学或物理改变,以使所得材料实行所期望的电路功能。
7.其他微制造领域也可能需要将流体精准地沉积到衬底中或衬底上。因此,需要一种可用于对每单位衬底面积分配预定体积的一种或多种流体的方法及装置。
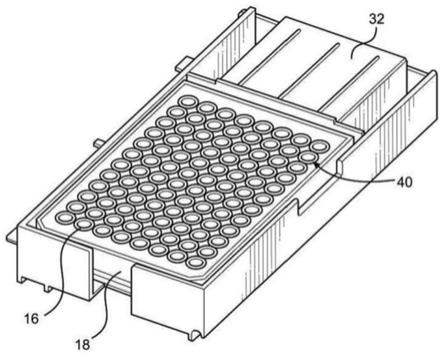
8.图2表示与数字分配装置20(图4)一起使用的微井板18(图3)的单个井16。当打印头10的流体喷射器12a的阵列被定向为垂直于打印头10的行进方向时,流体喷射器12a的一部分将位于井16的目标区域22外部,且因此将不用于将流体喷射到井16中。喷射器阵列12a中闲置的流体喷射器可能由于邻近闲置流体喷射器的打印头10上的流体变干而失火。另外,喷射器阵列12a中的太靠近井16的侧壁的流体喷射器在喷射器阵列12a在井16之上的通过(pass)期间被使用的情况下可能会导致流体从目标区域溅出。
9.使用传统打印头10可为填充微井板的井16的有效方法,然而,可能需要打印头10的许多次通过来获得大的流体分配体积。举例来说,以每英寸1200
×
1200滴(drop per inch,dpi)的分辨率打印的传统打印头的100个喷嘴阵列可产生具有10,000个滴的正方形,或具有大约7,853滴的圆。如果使用10微微升(pl)的滴大小,则正方形将包含100,000pl(0.1微升)且圆将包含0.079微升。为了获得1微升的体积,正方形将需要打印头10的10次重复通过,且圆形实例将需要比10次多的通过。因此,需要一种系统及方法,以便以更高的精度及速度在目标区域中沉积相对大的流体体积。
技术实现要素:
10.因此,本公开的实施例提供一种用于将一种或多种流体喷射到衬底的目标区域中的数字分配装置。所述数字分配装置包括:(a)流体喷射头,用于所述数字分配装置,所述流体喷射头上具有一个或多个流体喷射器阵列;(b)流体喷射头平移装置,用于在第一方向上在所述衬底的所述目标区域之上移动所述流体喷射头,其中所述流体喷射头上的所述一个或多个流体喷射器阵列被定向为平行于所述第一方向;以及(c)控制装置,用于在所述一个或多个流体喷射器阵列中的一个或多个流体喷射器与所述衬底的所述目标区域相交时激活所述一个或多个流体喷射器。
11.本公开的另一实施例提供一种用于将预定量的流体分配到衬底的目标区域中的方法。所述方法包括提供数字分配装置。所述数字分配装置包含:(a)流体喷射头,用于所述数字分配装置,所述流体喷射头上具有一个或多个流体喷射器阵列;(b)流体喷射头平移装置,用于在第一方向上在所述衬底的所述目标区域之上移动所述流体喷射头,其中所述流体喷射头上的所述一个或多个流体喷射器阵列被定向为平行于所述第一方向;以及(c)控制装置,用于在所述一个或多个流体喷射器阵列中的一个或多个流体喷射器与所述衬底的所述目标区域相交时激活所述一个或多个流体喷射器。在激活所述一个或多个流体喷射器以将流体喷射到所述目标区域中,直到预定量的流体沉积在所述目标区域中的同时,在所述衬底的所述目标区域之上移动所述流体喷射头。
12.在一些实施例中,所述流体喷射头上面包含两个流体喷射器阵列。在其他实施例中,所述流体喷射头上面包含三个流体喷射器阵列。在又一些其他实施例中,所述流体喷射头上面包含四个流体喷射器阵列。
13.在一些实施例中,所述流体喷射头上面包含四个流体喷射器阵列,并且所述四个流体喷射器阵列以二维矩阵排列。
14.在一些实施例中,微井板的井的目标区域比所述微井板的所述井的总敞开区域小5%到50%。
15.在一些实施例中,所述一个或多个流体喷射器阵列中的每一阵列跨越微井板的多于一个井。在其他实施例中,所述一个或多个流体喷射器阵列中的每一阵列具有大于所述目标区域的跨度。
16.在一些实施例中,所述流体分配系统包括衬底平移机构,所述衬底平移机构用于在垂直于所述第一方向的第二方向上移动所述衬底。在其他实施例中,在所述流体喷射头已经行进过所述衬底预定次数之后使所述衬底在所述第二方向上改变位置(index)。
17.在一些实施例中,流体仅沿着所述目标区域的中心线喷射。在其他实施例中,所述一个或多个流体喷射器仅在所述目标区域的一部分中被激活,结果减少流体在所述目标区域外部的飞溅。
18.在一些实施例中,所述一个或多个流体喷射器阵列中的所述一个或多个流体喷射器中的全部在所述一个或多个流体喷射器阵列在所述目标区域之上通过时至少被激活一次。
19.在一些实施例中,使用所述喷射头在所述目标区域之上移动的最小速度,且使用用于激活所述一个或多个流体喷射器的最大频率,从而在所述目标区域中喷射最大量的流体。
20.本文所述的装置及方法会改善将精准量的所述一种或多种流体分配在衬底的预定区域中的速度。因此,所述系统及方法可用于实行样本分析以及用于电子及其他装置的微制造。
附图说明
21.图1是示出现有技术喷射头上流体喷射器阵列的排列的现有技术喷射头的平面图(未按比例绘制)。
22.图2是在衬底的目标区域之上通过的图1所示喷射头的现有技术喷射器阵列的平面图(未按比例绘制)。
23.图3是根据本公开的用于与数字分配装置一起使用的托盘中的微井板的透视图(未按比例绘制)。
24.图4是根据本公开的数字分配装置的透视图(未按比例绘制)。
25.图5是示出喷射头上流体喷射器阵列的排列的根据本公开的喷射头的平面图(未按比例绘制)。
26.图6是根据本公开的用于喷射头的单个喷射器阵列的平面特写图(close
‑
up view)(未按比例绘制)。
27.图7是示出当图5所示喷射头的喷射器阵列在微井板的单个井之上通过时,所述喷射器阵列的激活的平面图(未按比例绘制)。
28.图8是用于在其中沉积流体的矩形及圆形容器(receptacle)的目标区域的示意性图示(未按比例绘制)。
29.图9是跨越衬底的几个矩形容器的图5所示喷射头的喷射器阵列的示意图(未按比例绘制)。
30.图10是跨越具有不同大小的目标区域的衬底的几个矩形容器的图5所示喷射头的喷射器阵列的示意图(未按比例绘制)。
31.图11是具有用于不同流体的几个目标区域的矩形容器的示意图(未按比例绘制)。
32.图12及图13是其中两个流体喷射器阵列跨越容器的不同目标区域的圆形容器的示意图(未按比例绘制)。
33.图14是其中三个流体喷射器阵列跨越具有指定目标区域的两个不同的圆形容器的示意图(未按比例绘制)。
34.图15是图4所示数字分配装置中的流体喷射控制器的示意性附图。
具体实施方式
35.与传统喷墨打印装置相比,所公开的实施例提供一种独特的流体喷射头,所述流体喷射头用于将预定量的流体分配到目标区域中,如以下更详细地阐述。流体喷射头的一个应用是使用数字分配装置20将流体沉积到衬底上,例如沉积到微井板18(图3)的井16中。为了本公开的目的,本文所述的衬底是微井板18。然而,本文中所述的装置及方法可应用于将流体沉积到包括但不限于载玻片、电路板等的任何合适的衬底上。
36.根据本公开的实施例,当容纳微井板18的托盘32被平移机构34在箭头36所示的y方向上移动经过数字分配装置20时,流体喷射头38(图5)在如由箭头14所示的x方向上(x方向与y方向正交)移动,以便可将流体分配到微井板18的每一行40中的井16中。与图1所示传统打印头不同,根据本公开的流体喷射头38具有与流体喷射头38所行进的x方向平行设置的喷射器阵列42a到42d。另外,喷射器阵列42a到42c与42b到42d间隔开距离y,距离y介于约4mm到约5mm的范围内,距离y对应于每一井16的中心线。同样地,每一喷射器阵列42a到42b与42c到42d间隔开距离x,距离x可介于约1000μm到约1100μm的范围内,并且每一喷射器阵列42a到42d具有长度l,长度l介于约1800 80到约2000μ0的范围内。在其他实施例中,每一喷射器阵列42a到42d的长度l可大于每一井16的直径。图6是喷射器阵列42a的特写视图,所述喷射器阵列42a包含设置在流体供应通孔45的相对侧上的两列流体喷射喷嘴43a与43b。
37.当流体喷射头38的喷射器阵列大于井16的直径或流体沉积的预定目标区域时,将仅激活喷射器阵列42a到42d的选择部分以将流体沉积到井16中。图7示出当流体喷射头38跨越单个井16在箭头14的方向上移动时用于激活喷射器阵列42a的由原语(primitive)p1到p4定义的流体喷射器的群组的序列。在序列的第一步骤1中,仅激活以原语p1定义的流体喷射器以将流体沉积到井16中;在序列的第二步骤2中,激活以原语p1及p2定义的流体喷射器。在序列的第三步骤3中,激活以原语p1、p2及p3定义的流体喷射器。当流体喷射头38继续在箭头14所示方向上移动时,如步骤4中所示,仅激活以原语p2及p3定义的流体喷射器。在序列的步骤5中,激活以原语p2、p3及p4定义的流体喷射器,并且在步骤6中,激活以原语p3及p4定义的流体喷射器。当流体喷射头38在目标区域之上移动时,可依序地或随机地激活以原语p1、p2及p3中的每一者定义的流体喷射器。
38.为了改善在衬底的预定目标区域或容器中沉积流体的精度及速度,针对单个流体喷射器阵列提供以下假设:
39.1.衬底的目标区域中的目标体积为v
target
。
40.2.流体喷射头的速度限制(最小及最大)为s
max
及s
min
。
41.3.喷射器阵列中每一流体喷射器产生的滴大小为v
droplet
。
42.4.喷射器阵列中流体喷射器的数目为n。
43.5.目标区域中的容器的容器直径或宽度为d
t
。
44.6.流体喷射器阵列及被喷射流体的最大喷射频率为f
max
。
45.一旦流体喷射头38运动,阵列中的每一流体喷射器将行进过目标区域或容器。对于单喷射器阵列分配流体,阵列被定位成使得在圆形井的情况下跨越井16的整个直径。如果容器50是矩形的(图8),则喷射器阵列的定位就不那么重要,但以矩形容器50的中心区域52为目标仍然是最佳实践。然而,由于喷射器阵列的定位精度以及流体喷射错误方向及流体的潜在附属沉积(satellite deposition),容器50的目标区域52将小于实际容器50。目标区域取决于装置精度以及喷射器阵列的精度。同样,对于圆形容器54,目标区域56将小于容器54。
46.当喷射器阵列相对于容器50或54移动时,根据上述原语的流体喷射器将以“先进先出(first in first out)”的方式逐个进入目标区域52或56,且随后逐个离开目标区域。考虑到喷嘴阵列中只有一个流体喷射器,可计算出流体喷射器在特定频率下可分配的流体小滴(fluid droplet)的数目。为了计算每流体喷射器的流体小滴的数目,将流体喷射头38的速度设定为s
min
,因为流体喷射头38的最小速度将产生最大体积的流体输出。喷射频率被设定为最大频率f
max
,因为这也会产生最大体积的流体输出。每流体喷射器的流体小滴的数目通过以下公式进行计算:
47.每流体喷射器的流体小滴数=f
max
*d
t
/s
min
。
48.举例来说,如果目标直径为4mm,最大喷射频率为18khz,且流体喷射头38的最小速度为25.4mm/sec,则喷射器阵列中的一个流体喷射器将分配18,000*4/25.4=2835个流体小滴。
49.由于我们的喷射器阵列中的每一流体喷射器将采用相同的路径跨越容器,因此整个喷射器阵列之上的总流体小滴数可通过以下公式进行计算:
50.总流体小滴数=每流体喷射器的流体小滴数*n。
51.举例来说,如果每一喷射器阵列中存在100个流体喷射器,则每一喷射器阵列的总流体小滴数将为2835*100=283,500个流体小滴。
52.每一小滴将包含特定体积的流体,因此流体的分配体积可通过以下公式进行计算:
53.分配体积=总流体小滴数*v
droplet
。
54.举例来说,如果喷射器阵列中的每一流体喷射器喷射10微微升(pl)的小滴,则分配的总体积为283,500*10pl=2,835,000pl或2.835(μl)的流体。
55.如果我们假设最佳喷射频率f
o
也是最大频率(至少目前如此),则以上计算表示流体喷射头38在容器50或54之上的一次通过中可分配的最大流体体积。如果目标体积大于最大体积,则需要流体喷射头38在容器之上多次通过,因为流体喷射头已经以装置所能够提供的最低速度移动。
56.如果目标体积小于喷射器阵列的最大体积输出,则使用根据公式的第一方程式的
流体喷射头的最大速度如下:
57.s
opt
=f
max
*d
t
/每流体喷射器的小滴数。
58.对于每流体喷射器的小滴数的较低值,方程式变为
59.每流体喷射器的小滴数=目标体积(小滴)/n
60.其中
61.目标体积(小滴)=v
target
/v
droplet
。
62.因此,在代入变量之后,最佳流体喷射头速度s
opt
的方程式变为:
63.s
opt
=f
max
*d
t
/((v
target
/v
droplet
)/n)
64.仅使用v
max
对v
target
的比率的更简单的方程式可如下使用:
65.s
o
=s
min
*v
max
/v
target
66.其中,s
o
是所计算的流体喷射头的速度。
67.使用目标体积为1.0μl(1000000pl)的前述示例值:
68.s
opt
=18,000hz*4mm/((1000000/10)/100)=72mm/sec。
69.或者利用更简单的方程式:
70.s
o
=25.4mm/sec*2.835μl/1.0μl=72mm/sec。
71.因此,流体喷射头或流体喷射器阵列可以72mm/sec移动并且仍然达到目标体积。
72.然而,如果所计算出的流体喷射头的速度超过s
max
,则可采取一些措施来补偿流体喷射头的较慢速度。首先,可使用s
max
作为流体喷射头的速度并重新计算要在方程式中使用的流体喷射频率而不是最大流体喷射频率来降低流体喷射频率。然而,期望的是,通过从流体喷射频率与计算出的频率的最接近的匹配中选择频率并修改速度以补偿流体喷射频率来确定装置将工作的流体喷射频率。
73.第二种选择将是减小目标直径或面积。通过减小目标直径或面积,可使用相同的计算出的速度及最佳流体喷射频率,从而向容器输送正确体积的流体。
74.第三种选择将是减少喷嘴阵列中的所使用的流体喷射器的数目。第三种选择将在不减小目标直径或面积的条件下提供与第二种选择类似的结果。第三种选择的缺点是,流体喷射器中的一些流体喷射器将处于闲置状态,且因此在用于下一个流体喷射作业之前,可能需要附加的清洁或维护。
75.减小流体喷射频率的方程式可使用上述每流体喷射器的小滴数方程式来计算,并按如下方程式对新频率进行求解:
76.f
new
=每流体喷射器的小滴数*s
max
/d
t
。
77.如前所述,每流体喷射器的小滴数现在是与目标体积相关联的值,而不是根据以下方程式得出的最大体积:
78.每流体喷射器的小滴数=目标体积(小滴)/n
79.其中
80.目标体积(小滴)=v
target
/v
droplet
81.因此:
82.f
new
=((v
target
/v
droplet
)/n)*(s
max
/d
t
)。
83.作为另一种选择,如下所示通过使用最大速度对计算出的速度的比率,可得到相同的解:
84.f
new
=f
max
*s
max
/s
o
,
85.其中s
o
是从先前的流体喷射头速度计算得到的不受限(uncapped)计算流体喷射头速度。
86.可使用以下公式计算减小的目标直径:
87.d
new
=每流体喷射器的小滴数*s
max
/f
max
88.而之前,每流体喷射器的小滴数=(v
target
/v
droplet
)/n。
89.已知体积可用于以下方程式:
90.d
new
=((v
target
/v
droplet
)/n)*s
max
/f
max
。
91.或者,最大速度对计算速度的比率可使用如下:
92.d
new
=d
t
*s
max
/s
o
93.以得到同样的结果。
94.到目前为止,已经仅考虑一个容器,然而,一行中可能存在许多容器来填充流体,并且基于喷射器阵列长度l及容器直径,可存在多于一个容器50a到50c同时填充,如由图10中的散列圆所示。在这种情况下,流体喷射头的速度受到容器50a的限制,容器50a需要最低的流体喷射头速度来填充流体。
95.对于其它容器,可使用例如改变频率或目标直径以弥补流体喷射头速度的差异的方法来补偿较慢的流体喷射头速度。如果所述装置可向每一流体喷射器输送不同的频率,则修改频率将是最佳选择。然而,如果不能为各个流体喷射器改变流体喷射频率,则如图10中所示减小容器50a到50c的目标直径可为在大多数情况下起作用的合适选择。
96.在一些实施例中,流体喷射头38可包括喷射器阵列42a到42d的矩阵,所述矩阵为每一喷射器阵列提供不同流体的喷射。在其它实施例中,数字分配装置20可包括多个流体盒(fluid cartridge),其中每一流体盒通过流体喷射头38分配不同的流体。因此,每次在衬底之上通过时,可分配不同的流体。在其中流体喷射头38具有喷射器阵列42a到42d(喷射器阵列42a到42d各自分配不同的流体,并且喷射器阵列42a到42d中的全部装配在容器60(图11)的目标区域内)的矩阵的实施例中,不同的流体可被分配在容器的区域62a到62c中的每一者中。如果每一喷射器阵列具有不同的目标体积,则可通过改变流体喷射频率或为每一喷射器阵列指定不同的目标体积来调整目标体积。
97.然而,如果容器是圆形的,则在目标区域内放置多个喷射器阵列会稍微困难一些。图12示出具有用于两种不同流体的目标区域72a及72b的圆形容器70。流体喷射器阵列42b可与容器70的中心部分72b对齐。然而,用于喷射器阵列42a的目标区域72a不是那么简单。几何上,喷射器阵列42a的流体分配长度由圆形容器的弦界定。如果已知容器的直径并且已知喷射器阵列42a与42b之间的距离(d),则流体分配长度可通过以下公式进行计算:
98.流体分配长度=2*√(r2‑
d2)
99.其中r是容器的半径且d是容器的中心线与喷射器阵列42a的中心线之间的距离,其中喷射器阵列42b与容器70的中心线对准。然而,具有更像图13的喷射器阵列42a与42b的对准可能是有利的。在图13中,喷射器阵列42a与42b相对于中心等距偏移,其中d1=d2。
100.如上所述,喷射器阵列42a及42b可跨越多于一个容器,并且这也可以是喷射器阵列如何与容器对准的因素。举例来说,如图14所示,喷射器阵列42a到42c可与两个容器80及90对准以填充目标区域82a、92a及92b。
101.图15是用于控制喷射头38上的流体喷射器的流体喷射器控制器100的示意性附图。小滴体积输入数据112被输入到数字分配装置20。小滴体积数据112可存储在存储器114中,以供装置20的中央处理器116使用来控制流体喷射头平移装置118、衬底平移机构120、及流体喷射头38所分配的流体量。
102.上述方法提供了优于传统打印头的优点,传统打印头具有与打印头在衬底之上的行进方向垂直设置的喷射器阵列。上述方法可用于通过以下来扩散(spread)要分配的流体体积:流体喷射头多次通过;以及沿着流体喷射头的喷射器阵列的多个流体喷射器。这将使流体喷射器丢失或性能不佳的影响最小化。根据期望的分配精度及喷射器不能正常工作的概率而定,可指定或计算要使用的流体喷射器的最小数目。
103.出于本说明书及随附权利要求的目的,除非另有说明,否则在本说明书及权利要求中使用的表示数量、百分比或比例的所有数字以及其他数值要理解为在所有情形中均由用语“约(about)”修饰。因此,除非有相反的说明,否则在以下说明书及随附权利要求中阐述的数值参数是可依据寻求通过本公开获得的所期望性质而变化的近似值。至少,且不试图将等效原则的应用限制于权利要求的范围,每一数值参数应至少根据所报告有效数字的数目且通过应用普通舍入技术来解释。
104.尽管已阐述特定实施例,然而申请人或所属领域中的其他技术人员可想到目前无法预见或目前可能无法预见的替代形式、修改、变化、改进及实质性等效形式。因此,所提交的且可由他们修正的随附权利要求旨在囊括所有此种替代形式、修改、变化、改进及实质性等效形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。