1.本发明涉及定子铁芯支承装置、以及定子铁芯的支承方法。
背景技术:
2.过去,已知有如日本特开2015
‑
089601中所记载的那样,在利用卡具把持定子铁芯的状态下进行组装的制造装置。
技术实现要素:
3.在上述过去的制造装置中,没有设想使定子铁芯上下反转。但是,如果能够使定子铁芯上下反转,则可以有效地进行定子的制造,是很理想的。例如,在配备有分段线圈(扁平线线圈)的东子的制造中,如果能够使定子铁芯上下反转,则将包含在分段线圈中的多个大致u字形的导体段插入到定子铁芯的缝隙中的作业和将多个导体段弯曲并进行焊接的作业,均可以在定子铁芯的上侧进行,可以顺畅地进行定子的制造。
4.进而,在进行定子的轴向方向两侧的清理的情况下,如果能够使定子铁芯上下反转,则由于在清理任何一侧的情况下,可以在使清理侧朝向下侧的状态下进行向清理侧喷射空气等的清理,因此,可以有效地使异物向下方落下,可以有效地进行清理。并且,可以获得防止或减少异物的再次附着的效果。
5.在这样的背景下,在上述过去的制造装置中使定子铁芯上下反转的情况下,在定子铁芯的夹具保持部位易于作用过大的负荷,定子铁芯容易引起层叠钢板的卷曲、压痕、剥离等损伤。
6.因此,本公开提供一种能够既抑制损伤又使定子铁芯反转的定子铁芯支承装置及定子铁芯的支承方法。
7.根据本公开的定子铁芯支承装置包括:两个支承构件,所述两个支承构件夹着定子铁芯的中心轴相对于所述定子铁芯在径向方向上相对向,并且,保持所述定子铁芯;以及反转机构,所述反转机构通过在保持着所述定子铁芯的状态下使所述两个支承构件两个一起旋转,使所述定子铁芯的沿着所述中心轴的延伸方向的朝向反转。各个所述支承构件具有:径向方向对向面,所述径向方向对向面在所述径向方向上与所述定子铁芯相对向;第一轴向方向对向面,所述第一轴向方向对向面在所述轴向方向上与所述定子铁芯的轴向方向上的第一侧相对向;以及第二轴向方向对向面,所述第二轴向方向对向面在所述轴向方向上与所述定子铁芯的轴向方向上的第二侧相对向,并且,被配置在距所述第一轴向方向对向面的在所述轴向方向上的距离比所述定子铁芯在所述轴向方向上的尺寸长的位置,在所述两个支承构件保持着所述定子铁芯的状态下进行反转的过程中,使所述定子铁芯相对于所述两个支承构件在所述轴向方向上相对移动,并且,所述第一轴向方向对向面通过与所述定子铁芯的所述轴向方向上的第一侧接触,限制所述定子铁芯相对于所述支承构件向所述轴向方向上的第一侧的相对移动,所述第二轴向方向对向面通过与所述定子铁芯的所述轴向方向上的第二侧接触,限制所述定子铁芯相对于所述支承构件向所述轴向方向上的第
二侧的相对移动。
8.根据本发明,由于可以利用反转机构使沿着定子铁芯的中心轴的方向反转,因此,例如,可以在定子铁芯的上侧同时进行制造定子时的定子的轴向方向上的两侧的作业,可以有效地进行制造作业。另外,由于定子的轴向方向上的两侧的清理也可以在将清理侧朝向下侧的状态下同时进行,因此,可以使异物有效地向铅垂方向下方侧飞散,可以有效地进行定子的清理。另外,还可以获得防止或减轻异物的再次附着的效果。
9.进而,在两个支承构件不能脱离地保持着定子铁芯的状态下,反转机构使两个支承构件反转,一边使定子铁芯相对于支承构件在轴向方向上相对移动,一边使定子铁芯的沿着中心轴的方向反转。从而,与日本特开2015
‑
089601号公报的制造装置不同,由于两个支承构件不以很大的力来把持定子铁芯的规定位置,因此,在定子铁芯反转时,不会对定子铁芯作用过大的力。因而,定子铁芯不容易引起层叠钢板的卷曲、压痕、剥离等损伤。
10.另外,所述反转机构也可以使保持着所述中心轴与铅垂方向大致平行地延伸的所述定子铁芯的所述两个支承构件反转,所述两个支承构件以所述定子铁芯相对于所述两个支承构件在所述径向方向上能够相对移动的状态保持所述定子铁芯。
11.根据本结构,可以在定子铁芯的中心轴与铅垂方向大致平行的状态下制造定子。从而,由于可以在正上方或正下方进行定子的轴向方向上的两端部的作业,因此,可以高效率地制造定子。另外,由于定子铁芯相对于两个支承构件在径向方向上能够相对移动,因此,可以大幅降低在定子铁芯相对于支承构件在轴向方向上相对移动时(定子铁芯的反转时)定子铁芯从径向方向对向面受到的摩擦力,可以大幅降低定子铁芯损伤的风险。
12.另外,也可以为,在各个所述支承构件中,所述径向方向对向面的动摩擦系数比所述第一轴向方向对向面的动摩擦系数小,并且,比所述第二轴向方向对向面的动摩擦系数小。
13.根据本结构,在定子铁芯反转时,可以使定子铁芯相对于两个支承构件顺畅地滑动。因而,可以大致防止或者可以防止定子铁芯的损伤。
14.另外,也可以为,在各个所述支承构件中,所述第一轴向方向对向面的冲击吸收性能比所述径向方向对向面的冲击吸收性能大,所述第二轴向方向对向面的冲击吸收性能也比所述径向方向对向面的冲击吸收性能大。
15.另外,冲击吸收性能也可以通过下面的方法客观地判定。即,对于第一轴向方向对向面、第二轴向方向对向面、或者径向方向对向面,利用相同的材料构成所述各个面,在对应于任何一个面的情况下,都将具有相同厚度的板状构件贴附到地板上,使相同的球状构件(例如,超级球等)从相同的高度不具有初速度地与铅垂方向平行地自由下落,测定与板状构件碰撞时的反弹高度(测定反弹系数),由此,反弹高度越低,则判断为冲击吸收性能越高。
16.根据本结构,易于由第一或者第二轴向方向对向面吸收当定子铁芯在支承构件反转时碰撞到第一或者第二轴向方向对向面时的冲击。因而,可以抑制定子铁芯与第一或者第二轴向方向对向面碰撞时的定子铁芯的损伤。
17.另外,至少一个所述支承构件的所述径向方向对向面包括:第一圆筒面,所述第一圆筒面由具有第一曲率半径的第一圆筒内周面的一部分构成;以及两个第二圆筒面,所述两个第二圆筒面由具有比所述第一曲率半径小的第二曲率半径的第二圆筒内周面的一部
分构成,并且,设置于所述第一圆筒面的所述轴向方向上的两侧。
18.根据本结构,可以利用第一圆筒面保持具有与第一曲率半径相同程度的外径的定子铁芯,可以利用两个第二圆筒面保持具有与第二曲率半径相同程度的外径的定子铁芯。因而,可以利用定子铁芯支承装置支承外径不同的多个定子铁芯,可以提高定子铁芯支承装置的通用性。
19.另外,所述两个支承构件的一个所述支承构件的所述径向方向对向面也可以为平面。
20.在两个支承构件的径向方向对向面都由圆筒内周面的一部分构成的情况下,有必要将两个支承构件的两个径向方向对向面两者高精度地配置在同一圆筒内周面上,不得不精密地进行两个支承构件的定位。与此相对,根据本结构,由于一个支承构件的径向方向对向面为平面,因此,可以增大一个支承构件相对于另一个支承构件所能够允许的的相对位置的范围,可以容易地进行两个支承构件的定位。
21.另外,根据本发明的定子铁芯的支承方法,使用定子铁芯支承装置,所述定子铁芯支承装置包括:两个支承构件,所述两个支承构件夹着定子铁芯的中心轴相对于所述定子铁芯在径向方向上相对向,并且,保持所述定子铁芯;以及反转机构,所述反转机构通过在保持着所述定子铁芯的状态下使所述两个支承构件两个一起旋转,使所述定子铁芯的沿着所述中心轴的延伸方向的朝向反转,各个所述支承构件具有:径向方向对向面,所述径向方向对向面在所述径向方向上与所述定子铁芯相对向;第一轴向方向对向面,所述第一轴向方向对向面在所述轴向方向上与所述定子铁芯的轴向方向上的第一侧相对向;以及第二轴向方向对向面,所述第二轴向方向对向面在所述轴向方向上与所述定子铁芯的轴向方向上的第二侧相对向,并且,被配置在距所述第一轴向方向对向面的在所述轴向方向上的距离比所述定子铁芯在所述轴向方向上的尺寸长的位置。所述方法包括:保持工序,所述保持工序为:利用所述两个支承构件保持所述定子铁芯,以使得在各个所述支承构件中,所述第一轴向方向对向面与所述定子铁芯的所述轴向方向上的第一侧相对向,并且,所述第二轴向方向对向面与所述定子铁芯的所述轴向方向上的第二侧相对向,进而,成为所述定子铁芯相对于所述两个支承构件在所述轴向方向上能够相对移动的状态且相对于所述两个支承构件不能脱离的状态;以及反转工序,所述反转工序为:在所述保持工序之后,通过使保持着所述定子铁芯的所述两个保持构件两个一起旋转,使所述定子铁芯相对于所述两个支承构件在所述轴向方向上相对移动,并且,使所述定子铁芯的沿着所述中心轴的延伸方向的朝向反转。
22.根据本发明,由于可以利用反转机构使沿着转子铁芯的中心轴的方向反转,因此,例如可以在定子铁芯的上侧同时进行制造定子时的定子的轴向方向上的两侧的作业,可以有效地进行制造作业。另外,由于还可以在使清理侧朝向下侧的状态下进行定子的轴向方向的两侧的清理,因此,可以有效地使异物向铅垂方向下方侧飞散,可以有效地进行定子的清理。另外,还可以获得防止或者减轻异物的再次附着的效果。
23.进而,在两个支承构件不能脱离地保持着定子铁芯的状态下,反转机构使两个支承构件反转,使定子铁芯在轴向方向上相对于支承构件相对地移动,并且,使定子铁芯的沿着中心轴的方向反转。从而,与日本特开2015
‑
089601号公报的制造装置不同,由于两个支承构件不用很大的力把持定子铁芯的规定位置,因此,在定子铁芯反转时,不会在定子铁芯
上作用过大的力。因而,定子铁芯不容易引起层叠钢板的卷曲、压痕、剥离等损伤。
24.根据本发明,既抑制损伤又使定子铁芯反转。
附图说明
25.下面,参照附图说明本发明的示范性的实施方式的特征、优点、技术和工业上的意义,在附图中,类似的附图标记表示类似的部件,其中:
26.图1a是说明根据本发明的一种实施方式的定子铁芯支承装置的定子铁芯的支承动作和反转动作的示意正视图。
27.图1b是说明上述定子铁芯支承装置的定子铁芯的支承动作和反转动作的示意正视图。
28.图1c是说明上述定子铁芯支承装置的定子铁芯的支承动作和反转动作的示意正视图。
29.图1d是说明上述定子铁芯支承装置的定子铁芯的支承动作和反转动作的示意正视图。
30.图1e是说明上述定子铁芯支承装置的定子铁芯的支承动作和反转动作的示意正视图。
31.图2是表示进行保持动作的过程中的一对支承构件和定子铁芯的立体图。
32.图3是能够实施说明相对向的一对支承构件的距离的调整和一对支承构件的反转的反转机构的一个例子的示意图,是从铅垂方向的上方观察反转机构的一个例子的反转动作实施前的状态的俯视图。
33.图4是说明禁止定子铁芯的轴向方向上的相对移动的参考例的定子铁芯支承装置的支承动作的图。
34.图5是表示变形例的一对支承构件的示意正视图。
35.图6a是表示另外的变形例的一对支承构件的示意正视图,是表示一对支承构件保持着定子铁芯的状态的示意正视图。
36.图6b是表示图6a所示的一对支承构件保持着厚度比图6a所示的定子铁芯大的定子铁芯的状态的与图6a相对应的示意正视图。
37.图7a是表示一对支承构件的立体图。
38.图7b是从上方观察图1a所示的实施例的一对支承构件的示意俯视图。
39.图7c是从上方观察另外的变形例的一对支承构件的示意俯视图。
40.图8是说明两个支承构件的能够反转方向的图。
具体实施方式
41.下面,参照附图详细地说明根据本公开的实施方式。另外,最初设想,在下面包含多个实施方式或变形例的情况下,适当地组合它们的特征部分,构筑新的实施方式。另外,在下面的实施例中,在附图中,对于相同的结构采用相同的附图标记,省略重复的说明。另外,在多个附图中,包括示意图,在不同的附图之间,各个构件的纵、横、高度等的尺寸比并不一定一致。另外,在下面说明的结构部件中,对于表示最上位概念的独立权利要求中没有记载的结构部件,是任意的结构部件,不是必须的结构部件。另外,在本说明书中,在使用
“
大致”这样的用语的情况下,采用“粗略地说”这样的用语相同的含义,所谓“大致~”这样的要素,是指人们大体看起来符合。如果举例来说,大致圆筒内周面这样的要素,是指人们大体来看符合圆筒内周面。另外,在本实施方式和本变形例中,对于构成一对支承构件10a、10b、110a、110b、210a、210b、310a、310b的第一支承构件10a、110a、210a、310a与第二支承构件10b、110b、210b、310b大致相同(也包括相同的情况)的情况进行说明,但是,第一支承构件与第二支承构件也可以不同。另外,在下面的说明中,在谈及轴向方向的情况下,是指定子铁芯的轴向方向,在谈及径向方向的情况下,是指定子铁芯的径向方向。
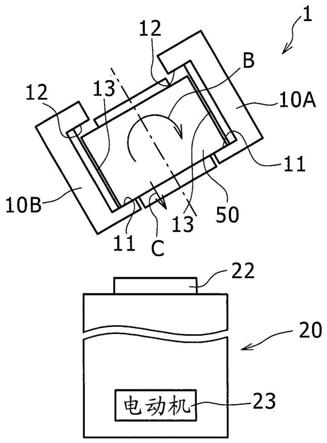
42.图1a~图1e是说明根据本发明的一种实施方式的定子铁芯支承装置1的定子铁芯50的支承动作和反转动作的示意正视图。另外,图2是表示进行定子铁芯50的保持动作的过程中的定子铁芯50和一对支承构件(两个支承构件)10a、10b的立体图,图3是说明能够实施相对向的一对支承构件10a、10b的距离调整和反转的反转机构30的一个例子的示意图,是从铅垂方向的上方观察反转机构30的一个例子的反转动作实施前的状态的俯视图。
43.如图1a所示,定子铁芯支承装置1配备有一对支承构件10a、10b以及载置装置20。另外,如图3所示,定子铁芯支承装置1还配备有反转机构30。如图1a所示,载置装置20包括壳体21、杆22、以及电动机23,杆22具有圆柱状的轴部22a和与轴部22a的上侧端部连接的圆板状的载置部22b。构成载置部22b的上表面的载置面22c是大致平行于水平方向伸展的平面,例如,从铅垂方向的上侧观察时的俯视图呈圆形形状。
44.如图2所示,定子铁芯50具有贯通孔52,圆柱状的保持构件51例如通过压入而嵌合于该贯通孔52。如图1a所示,保持构件51具有:从定子铁芯50的轴向方向上的第一侧的端部向轴向方向上的第一侧突出的第一突出部51;以及从定子铁芯50的轴向方向上的第二侧的端部向轴向方向上的第二侧突出的第二突出部51b。第一突出部51a及第二突出部51b各自的前端面由与轴向方向大致正交的平面构成。
45.在图1a所示的状态下,构成第二突出部51b的前端面的下表面被载置于载置面22c上。在用手等(图中未示出)保持结束了前一工序的定子铁芯50之后,例如,通过使手沿着规定行进路径在铅垂方向及水平方向上移动来实施该载置。在本实施方式中,一对支承构件10a、10b对中心轴与铅垂方向大致平行地延伸的定子铁芯进行保持。
46.详细地说,如图1a所示,保持构件51的第二突出部51b,在被载置于载置面22c的规定位置的状态下,一对支承构件10a、10b夹着定子铁芯50的中心轴相对于定子铁芯50在径向方向上相对向地配置。各个支承构件10a、10b具有第一轴向方向对向面11、第二轴向方向对向面12和径向方向对向面13,第一轴向方向对向面11及第二轴向方向对向面12在与定子铁芯50的轴向方向大致正交的方向上扩展,另一方面,径向方向对向面13在径向方向上与定子铁芯50的圆筒外周面50a相对向。
47.第一轴向方向对向面11与第二轴向方向对向面12在轴向方向上的距离比定子铁芯50在轴向方向上的尺寸长。如图2所示,径向方向对向面13形成包含在具有比定子铁芯50的外周面的外径稍大的内径的圆筒内周面中的圆弧面。在各个支承构件10a、10b中,径向方向对向面13的动摩擦系数比第一轴向方向对向面11的动摩擦系数小,比第二轴向方向对向面12的动摩擦系数小。详细地说,在本实施方式中,如图1a所示,通过对各个支承构件10a、10b的钢制的本体15的本体径向方向对向面15a实施用于提高滑动性的表面处理,构成径向方向对向面13。径向方向对向面13,例如,可以是在本体径向方向对向面15a上构成的dlc
(类金刚石碳)膜的表面,也可以是在本体径向方向对向面15a上实施kaniflon(化学镍/ptfe复合镀层)而构成的kaniflon膜的表面,或者,还可以是通过对本体径向方向对向面15a实施等离子体氮化处理而构成的等离子体氮化膜的表面。另外,也可以通过由相同的材料构成各支承构件并只对径向方向对向面进行抛光研磨,而使径向方向对向面的动摩擦系数比第一及第二轴向方向对向面的动摩擦系数小。
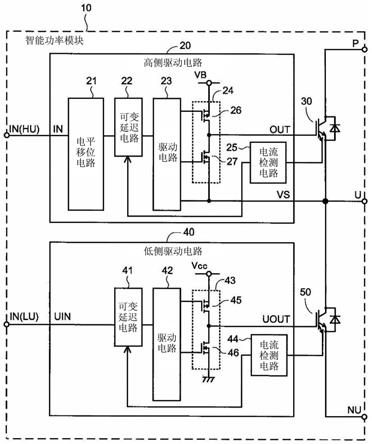
48.如图1a所示,构成一对支承构件10a、10b的第一支承构件10a和第二支承构件10b在箭头a所示的方向上同时移动,以使它们与定子铁芯50的中心轴的距离变得大致相同。详细地说,如图3所示,反转机构30包括具有阳螺纹的轴部31、第一螺母32、第二螺母33、第一电动机34、以及第二电动机35。轴部31在一对支承构件10a、10b相对向的方向(径向方向)上大致平行地延伸,在以一对支承构件10a、10b成面对称的假想面p为界的第一区域r1和第二区域r2中,阳螺纹的螺旋方向相互反向。
49.第一螺母32与位于第一区域r1的阳螺纹进行螺纹配合,第二螺母33与位于第二区域r2的阳螺纹进行螺纹配合。第一螺母32经由第一连接部37连接于第一支承构件10a,第二螺母33经由第二连接部38连接于第二支承构件10b。第一电动机34连接于轴部31的延伸方向上的一端,在控制转速和旋转方向的基础上,使轴部31旋转。
50.另一方面,第二电动机35的旋转轴39与轴部31的中心轴大致正交,并且,在包含在假想面p中的方向上延伸。在反转机构30进行反转动作之前的状态下,第二电动机35的旋转轴39的中心轴位于与轴部31的中心轴大致相同的铅垂方向的高度。转向基部39a被固定于第二电动机35的旋转轴39,转向基部39a具有相互隔开间隔地设置且大致平行于旋转轴39延伸的三个轴部。转向基部39a的第一轴部被固定于第一电动机34的壳体41。另外,转向基部39a的第二轴部的前端面与第一螺母接触,转向基部39a的第三轴部的前端面与第二螺母33接触,这里,第一螺母32在轴部31的轴向方向上能够滑动地与第二轴部的前端面接触,第二螺母33在轴部31的轴向方向上能够滑动地与第三轴部的前端面接触。在转向基部39a被第二电动机35旋转了的情况下,轴部31、第一螺母32、第二螺母33、第一电动机34旋转。在轴部31旋转了时,转向基部39a防止第一螺母32和第二螺母33一起旋转。第二电动机35的壳体42例如被固定于相对于建筑物静止的静止部。
51.借助该结构,在反转动作前实施的一对支承构件10a、10b对定子铁芯50的保持动作时,通过使第一电动机34驱动,经由第一连接部37与第一螺母32连接的第一支承构件10a在规定的高度向一个方向移动,经由第二连接部38与第二螺母33连接的第二支承构件10b也在规定的高度位置向一个方向移动。在反转机构30的反转动作前的状态下,第二电动机35的旋转轴39的中心轴的高度位置只要是包含在支承构件10a、10b所在的高度范围中的高度位置即可。但是,优选地,在反转机构30的反转动作前的状态下,若第二电动机35的旋转轴39的中心轴的高度位置被设定在支承构件10a、10b所在的高度范围的上限与下限的中间的高度位置,则在后面将要说明的一对支承构件10a、10b的转向的前后,支承构件10a、10b的高度位置一致。
52.第一电动机34的转速和旋转方向、以及第二电动机35的转速被来自于图中未示出的控制装置的信号所控制。控制装置具有存储部。存储部存储有第一电动机34的转速的信息、第一电动机34的旋转方向的信息、第二电动机35的转速的信息、第一电动机34的动作定时的信息、以及第二电动机35的动作定时的信息等。
53.再次参照图1a,载置装置20例如包括伺服缸(电动缸),通过利用图中未示出的控制装置控制电动机23的转速,使从壳体21突出的杆22进行伸缩,或者使之静止。伺服缸例如借助滚珠丝杠将电动机23的旋转转换成直线运动,通过由控制装置控制电动机23的转速,进行杆22的正确的位置控制。载置装置20的电动机23例如被固定于相对于建筑物静止的静止部。另外,第一电动机34、第二电动机35、以及载置装置的电动机23可以由一个控制装置控制,或者,也可以由两个以上的控制装置控制。另外,载置装置也可以利用液压缸或者气缸等代替伺服缸来控制杆的伸缩或停止。
54.在上述结构中,定子铁芯支承装置1如下所述地使定子铁芯50反转。首先,如图1a所示,将载置装置20的杆22的位置控制在第一规定高度,接着,如图1b所示,使一对支承构件10a、10b以在箭头a方向上相互接近的方式移动至规定部位。详细地说,参照图3,驱动第一电动机34,使轴部31以规定转速在第一旋转方向上旋转。如上所述,轴部31由于在第一区域r1和第二区域r2中阳螺纹的螺旋方向相互反向,因此,通过该轴部31的动作,可以使一对支承构件10a、10b与定子铁芯50接近至规定部位。另外,在本实施例中,对于利用左右螺纹的结构使一对支承构件10a、10b在直线方向上向彼此相反的方向移动的情况进行了说明,但是,也可以利用公知的其它任何结构,例如,气动卡盘或液压卡盘的结构,即,利用气压或液压使一对支承构件相互反向地直线移动。
55.上述规定部位与第一支承构件10a的径向方向对向面(圆弧面)13和第二支承构件10b的径向方向对向面(圆弧面)13位于同一圆筒内周面上的部位大体一致。因而,通过使圆筒内周面的内径比定子铁芯50的外径稍大,如图1b所示,在一对径向方向对向面13、13与定子铁芯50的外周面之间,存在有径向方向上的微小间隙。另外,在图1b所示的状态下,在各支承构件10a、10b中位于铅垂方向上侧的第一轴向方向对向面11隔着间隙在轴向方向上与定子铁芯50的轴向方向上的第一侧的端面53相对向,在各支承构件10a、10b中位于铅垂方向下侧的第二轴向方向对向面12与定子铁芯50的轴向方向上的第二侧的端面54接触。
56.接着,如图1c所示,使载置装置20的杆22向下侧移动至即使一对支承构件10a、10b旋转也不会与一对支承构件10a、10b接触的位置。之后,使一对支承构件10a、10b以第二电动机35(参照图3)的旋转轴39的中心轴为中心旋转,如图1d所示,使一对支承构件10a、10b上下反转。这通过使第二电动机35的旋转轴39以规定的转速旋转可以容易地实现。虽然图中未示出,但是,在该一对支承构件10a、10b旋转时,具有阳螺纹的轴部31和第一螺母32、第二螺母33、第一电动机34也旋转。
57.在图1b所示的状态下,由于在一对径向方向对向面13、13与定子铁芯50的圆筒外周面50a之间存在径向方向的微小间隙,因此,在一对支承构件10a、10b反转的过程中,在至少一个径向方向对向面13、13与定子铁芯50之间存在径向方向的间隙。其结果是,在一对支承构件10a、10b在图1c中的箭头b所示的方向上反转的过程中,定子铁芯50相对于一对支承构件10a、10b在图1c中箭头c所示的方向上沿轴向方向相对移动。并且,在将一对支承构件10a、10b的上下反转了的图1d所示的状态下,在各支承构件10a、10b中位于铅垂方向上侧的第二轴向方向对向面12隔着间隙与定子铁芯50的轴向方向上的第二侧的端面54在轴向方向上相对向,在各支承构件10a、10b中位于铅垂方向下侧的第一轴向方向对向面11与定子铁芯50的轴向方向上的第一侧的端面53接触。另外,在本实施例中,对于利用第二电动机35使一对支承构件10a、10b转向的情况进行了说明,但是,也可以是人利用手柄手动地使一对
支承构件旋转的结构等。这里,参照图8,所谓上述箭头b所示的反转方向,是指以与定子铁芯50的中心轴正交的垂线为中心旋转。这样进行旋转,也可以是使两个支承构件10a、10b的位置变化地反转。或者,也可以如图8中箭头e所示,两个支承构件10a、10b的位置不变,只有第一轴向方向对向面11和第二轴向方向对向面12的位置变化地反转。
58.最后,如图1e所示,通过控制装置的控制,使载置装置20的杆22伸长规定的长度至与保持构件51的下表面接触,利用杆22的载置面22c支承保持构件51的下表面。之后,当使第一电动机34向与第一旋转方向相反方向的第二旋转方向旋转,使一对支承构件10a、10b移动以便从定子铁芯50脱离时,定子铁芯50的反转动作结束。
59.如上所述,本公开的定子铁芯支承装置1具有:两个支承构件10a、10b,所述两个支承构件10a、10b夹着定子铁芯50的中心轴相对于定子铁芯50在径向方向上相对向,并且,保持定子铁芯50;以及反转机构30,所述反转机构30通过在保持着定子铁芯50的状态下使两个支承构件10a、10b两个一起旋转,使定子铁芯50的沿着中心轴的延伸方向的朝向反转。另外,各个支承构件10a、10b具有:径向方向对向面13,所述径向方向对向面13在径向方向上与定子铁芯50相对向;第一轴向方向对向面11,所述第一轴向方向对向面11与定子铁芯50的轴向方向上的第一侧在轴向方向上相对向;第二轴向方向对向面12,所述第二轴向方向对向面12与定子铁芯50的轴向方向上的第二侧在轴向方向上相对向,并且,配置在距第一轴向方向对向面11的在轴向方向上的距离比定子铁芯50的轴向方向上的尺寸长的位置。另外,在两个支承构件10a、10b保持着定子铁芯50的状态下反转的过程中,使定子铁芯50相对于两个支承构件10a、10b在轴向方向上相对移动。并且,第一轴向方向对向面11、11通过与定子铁芯50的轴向方向上的第一侧接触,限制定子铁芯50相对于支承构件10a、10b向轴向方向上的第一侧的相对移动,第二轴向方向对向面12、12通过与定子铁芯50的轴向方向上的第二侧接触,限制定子铁芯50相对于支承构件10a、10b向轴向方向上的第二侧的相对移动。即,通过在第一轴向方向对向面11、11及第二轴向方向对向面12、12对在两个支承构件10a、10b反转时定子铁芯50相对于支承构件10a、10b在轴向方向上的相对移动范围进行限制,防止定子铁芯50在反转时从支承构件10a、10b上脱落。
60.从而,可以利用反转机构30使定子铁芯50的沿着中心轴的方向反转,由于可以如本实施方式那样利用反转机构30使定子铁芯50上下反转,因此,可以在定子铁芯50的上侧同时进行在制造定子时的定子的轴向方向上的两侧的作业,可以有效地进行制造作业。另外,由于定子的轴向方向上的两侧的清理也可以在使清理侧朝向下侧的状态下同时进行,因此,可以使异物向铅垂方向下方侧有效地飞散,可以有效地进行定子的清理。另外,可以获得防止或者减轻异物的再次附着的效果。
61.进而,在两个支承构件10a、10b不能脱离地保持着定子铁芯50的状态下,反转机构30使两个支承构件10a、10b反转,一边使定子铁芯50相对于支承构件10a、10b在轴向方向上相对移动,一边使定子铁芯50的上下反转。从而,由于与日本特开2015-089601的制造装置不同,两个支承构件10a、10b不以很大的力把持定子铁芯50的规定位置,因此,在定子铁芯50的反转时,不会对定子铁芯50作用过大的力。因而,定子铁芯50不容易引起层叠钢板的卷曲、压痕、剥离等损伤。
62.进而,在定子铁芯支承装置1中,在使一对支承构件10a、10b反转时,使定子铁芯50相对于一对支承构件10a、10b在轴向方向上相对移动,不以禁止定子铁芯50相对于一对支
承构件10a、10b在轴向方向上相对移动的方式保持定子铁芯50。从而,如下面将要说明的那样,与禁止定子铁芯相对于支承构件在轴向方向上的相对移动的定子铁芯支承装置相比,可以将定子铁芯支承装置1的结构制成格外简单的结构。
63.图4是说明禁止定子铁芯50在轴向方向上的相对移动的参考例的定子铁芯支承装置401的支承动作的图。如图4所示,在这样的定子铁芯支承装置401中,有必要以在保持定子铁芯50时在轴向方向上夹持定子铁芯50的方式使一对支承构件410a、410b移动,需要在α方向、β方向及γ方向上使一对支承构件410a、410b伸缩用的三轴的动作部成。与此相对,在定子铁芯支承装置1中,由于没有必要在轴向方向上夹持定子铁芯50,因此,在保持定子铁芯50时,只要使一对支承构件10a、10b在作为径向方向的α方向上移动即可。换句话说,在本公开的定子铁芯支承装置1中,由于将一对支承构件10a、10b制成具有比定子铁芯50的厚度(轴向方向上的尺寸)大的宽度(轴向方向宽度)的圆筒形的槽的结构,因此,可以利用左右螺纹的单轴动作来开闭支承构件10a、10b,可以保持定子铁芯50。从而,可以将用于保持定子铁芯50的动作部的结构制成格外简单的结构。
64.另外,如上述实施方式那样,也可以为,反转机构30使保持着中心轴与铅垂方向大致平行地延伸的定子铁芯50的两个保持构件10a、10b反转,两个支承构件10a、10b以定子铁芯50相对于两个支承构件10a、10b在径向方向上能够相对移动的状态保持定子铁芯50。
65.根据本结构,可以在定子铁芯50的中心轴成为大致平行于铅垂方向的状态下制造定子。从而,由于可以在正上方或者正下方进行定子的轴向方向上的两端部的作业,因此,可以高效率地制造定子。另外,由于定子铁芯50相对于两个支承构件10a、10b在径向方向上能够相对移动,因此,在定子铁芯50相对于支承构件10a、10b在轴向方向上相对移动时(定子铁芯50反转时),可以大幅地降低定子铁芯50从径向方向对向面受到的动摩擦力,可以大幅地降低定子铁芯50损伤的风险。
66.另外,在上述实施方式中,从定子铁芯50的中心轴与铅垂方向大致平行的状态起使支承构件10a、10b反转,但是,也可以从定子铁芯50的中心轴相对于水平方向以90度以外的角度倾斜的状态起使支承构件10a、10b反转。另外,也可以是在定子铁芯支承构件保持着定子铁芯的状态下,一对支承构件与定子铁芯接触的结构,支承构件的径向方向对向面的静止摩擦系数成为在一对支承构件反转时定子铁芯相对于一对支承构件在轴向方向上相对移动的值的上限以下。
67.另外,在各支承构件中,径向方向对向面的动摩擦系数可以为第一轴向方向对向面的动摩擦系数以上的值,也可以为第二轴向方向对向面的动摩擦系数以上的值。但是,如上述实施例那样,当在各个支承构件10a、10b中,径向方向对向面13的动摩擦系数比第一轴向方向对向面11的动摩擦系数小,并且,比第二轴向方向对向面12的动摩擦系数小时,在定子铁芯50的反转时可以使定子铁芯50相对于两个支承构件10a、10b顺畅地滑动,可以基本上防止、或者防止定子铁芯50的损伤。
68.另外,根据本公开的定子铁芯的支承方法是使用定子铁芯支承装置1的定子铁芯的支承方法,所述定子铁芯支承装置1具有:两个支承构件10a、10b,所述两个支承构件10a、10b夹着定子铁芯50的中心轴相对于定子铁芯50在径向方向上相对向,并且,保持定子铁芯50;以及反转机构30,所述反转机构30通过在保持着定子铁芯50的状态下使两个支承构件10a、10b两个一起旋转,使定子铁芯50的沿着中心轴的延伸方向的朝向反转,各个支承构件
10a、10b具有:径向方向对向面13,所述径向方向对向面13在径向方向上与定子铁芯50相对向;第一轴向方向对向面11,所述第一轴向方向对向面11与定子铁芯50的轴向方向上的第一侧在轴向方向上相对向;以及第二轴向方向对向面12,所述第二轴向方向对向面12与定子铁芯50的轴向方向上的第二侧在轴向方向上相对向,并且,被配置在距第一轴向方向对向面11的在轴向方向上的距离比定子铁芯50在轴向方向上的尺寸长的位置。另外,本公开的定子铁芯的支承方法包括保持工序,所述保持工序为:在各个支承构件10a、10b中,第一轴向方向对向面11与定子铁芯50的轴向方向上的第一侧相对向,并且,第二轴向方向对向面12与定子铁芯50的轴向方向上的第二侧相对向,进而,利用两个支承构件10a、10b保持定子铁芯50,以便成为定子铁芯50相对于两个支承构件10a、10b在轴向方向上能够相对移动的状态且相对于两个支承构件10a、10b不能脱离的状态。另外,本公开的定子铁芯的支承方法包括反转工序,所述反转工序为:在保持工序之后,通过使保持着定子铁芯50的两个支承构件10a、10b一起旋转,使定子铁芯50相对于两个支承构件10a、10b在轴向方向上相对移动,并且,使定子铁芯50的沿着中心轴的延伸方向的朝向反转。采用根据本发明的定子铁芯50的支承方法,与定子铁芯支承装置1同样,能够既抑制损伤又使定子铁芯50反转。
69.另外,本公开并不受上述实施方式及其变形例的限定,在本技术的权利要求书中记载的事项及其等价的范围内,可以进行各种改进或变更。
70.例如,如图5也就是表示变形例的一对支承构件110a、110b的示意正视图所示,在各个支承构件110a、110b中,第一轴向方向对向面111的冲击吸收性能可以比径向方向对向面113的冲击吸收性能大,第二轴向方向对向面112的冲击吸收性能也可以比径向方向对向面113的冲击吸收性能大。这种结构,例如,在各个支承构件110a、110b中,可以通过对于第一轴向方向对向面111和第二轴向方向对向面112施加树脂涂敷或者施加聚氨基甲酸乙酯烧结来实施。
71.另外,可以利用下面的方法客观地判定冲击吸收性能。即,也可以为,对于第一轴向方向对向面、第二轴向方向对向面、或者径向方向对向面,在将与这些面相同材料且相同厚度的板状构件贴附于地板的基础上,使相同的球状构件(例如,超级球等)从相同的高度不具有初速度地与铅垂方向平行地自由下落并与板状构件碰撞,通过测定碰撞时的反弹高度(通过测定反弹系数),反弹的高度越低,则判断为冲击吸收性能越高。
72.根据本结构,定子铁芯50在支承构件110a、110b反转时碰撞第一或者第二轴向方向对向面111(或者112)时的冲击易于被第一或者第二轴向方向对向面111(或者112)吸收。因而,可以抑制定子铁芯碰撞第一或者第二轴向方向对向面111(或者112)时的定子铁芯50的损伤。另外,也可以不采用本结构,例如也可以为,第一轴向方向对向面、第二轴向方向对向面以及径向方向对向面由同一材质构成,具有相同的冲击吸收性能。
73.另外,如图6a及图6b也就是表示另外的变形例的一对支承构件210a、210b的示意正视图所示,在各个支承构件210a、210b中,径向方向对向面213也可以包括:第一圆筒面(更正确地说,圆弧面)213a,所述第一圆筒面213a由具有第一曲率半径的第一圆筒内周面的一部分构成;以及两个第二圆筒面(更正确地说,圆弧面)213b、213b,所述两个第二圆筒面213b、213b由具有比第一曲率半径小的第二曲率半径的第二圆筒内周面的一部分构成,并且,设置在第一圆筒面的轴向方向上的两侧。
74.根据本结构,如图6a所示,可以利用第一圆筒面213a保持具有与第一曲率半径相
同程度的外径的定子铁芯150,如图6b所示,可以利用两个第二圆筒面213b、213b保持具有与第二曲率半径相同程度的外径的定子铁芯250。因而,可以利用定子铁芯支承装置201支承外径不同的多个定子铁芯150、250,可以提高定子铁芯支承装置201的通用性。
75.另外,对于两个支承构件210a、210b这两者具有第一圆筒面213a和第二圆筒面213b的情况进行了说明。但是,也可以是只有一个支承构件具有第一圆筒面和第二圆筒面的结构。例如,在一个支承构件具有包含阶梯状的多个圆筒面的径向方向对向面的情况下,另外一个支承构件的径向方向对向面也可以由平面构成。另外,对于将支承构件210a、210b的径向方向对向面213、213形成两段的阶梯状,径向方向对向面213具有不同的两种曲率半径的圆筒面213a、213b的情况进行了说明。但是,也可以为,在至少一个支承构件中,将支承构件的径向方向对向面形成三段以上的阶梯状,由此,径向方向对向面具有不同的三种以上曲率半径的圆筒面,还可以为,一对支承构件能够支承不同的三种以上的定子铁芯。
76.另外,在上述实施例中,对于立体图如图7a所示,另一方面,从上方观察的俯视图如7b所示的具有一对支承构件10a、10b的定子铁芯支承装置1进行了说明,对于各个支承构件10a、10b的径向方向对向面13、13为圆弧面的情况进行了说明。但是,两个支承构件也可以为立体图如图7a所示,从上方观察的俯视图如图7c所示。即,也可以为,两个支承构件310a、310b之中的第一支承构件310a的径向方向对向面313为圆弧面,另一方面,两个支承构件310a、310b之中的第二支承构件310b的径向方向对向面314为平面,更详细地说,也可以为,在从铅垂方向上方观察时的俯视图中,第二支承构件310b的径向方向对向面314在与第一支承构件310a与第二支承构件310b相对向的一个方向(径向方向)大致正交的方向上延伸。
77.如图7b所示,在两个支承构件10a、10b的径向方向对向面13、13都是由圆筒内周面的一部分构成的圆弧面情况下,可以稳定地支承定子铁芯50,然而另一方面,有必要将两个支承构件10a、10b的两个径向方向对向面13、13这两者高精度地配置在同一圆筒内周面上,不得不精密地进行第二支承构件10b相对于第一支承构件10a在箭头d方向(与第一支承构件10a与第二支承构件10b相对向的方向正交的方向)上的定位。与此相对,根据本结构,由于一个支承构件310b的径向方向对向面314为平面,因此,能够增大一个支承构件310b相对于另一个支承构件310a能够允许的在箭头d方向上的相对位置的范围,不需要两个支承构件310a、310b的高精度的中心对准。因而,可以格外容易地进行两个支承构件310a、310b的定位。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。