1.本发明涉及交通控制领域,尤其是涉及一种车辆换道对交通效率影响的预测 方法。
背景技术:
2.随着我国高速公路建设里程的迅猛增加和汽车保有量的快速增长,交通需求 也越来越大,迅速增加的交通流量加大了道路的通行压力。高速公路部分路段的 通行能力已经不能满足现有需求,尤其是节假日,降低了整个高速公路网的运行 效率。高速公路交通需求大于通行能力时,就会导致高速公路交通拥堵,不仅影 响了高速公路的通行效率,而且增加了车辆之间得冲突。因此,寻找到合理的预 测方法,保证高速公路的高效运行,是目前需要解决的首要问题。
3.高速公路上的车道变换操纵可能会对交通流造成干扰,特别是在拥挤的情 况下,从而对交通运营产生负面影响。车辆变道对驾驶人的判断能力、反应能力 和操作能力有着更高的要求,一些不合理的换道行为和换道恶习都会引起通行效 率的变化。此前,许多研究应用经验车辆轨迹数据来评估车道变化对交通运营的 影响,计算车道变化引发的震荡传播和流量变化,但这并没有考虑车道变化前微 观交通参数对其的影响,预测结果并不准确。
技术实现要素:
4.发明目的:现有的关于车道变换对运行效率的研究无法准确地用于预测给定 实时交通状态变量的lci,为克服现有技术中存在的不足,本发明提出了一种车 辆换道对交通运行效率影响的预测方法,可以准确地预测不同的微观交通变量对 流量变化的影响,建立最佳换道模型,改善高速公路的运行效率。
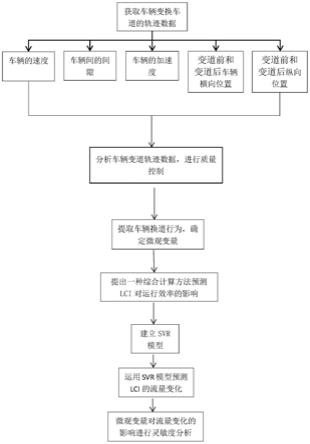
5.技术方案:一种车辆换道对交通运行效率影响的预测方法,包括以下步骤:
6.步骤(1):获取车辆变道轨迹数据;
7.步骤(2):分析车辆变道轨迹数据,进行质量控制;
8.步骤(3):提取车辆换道行为,确定微观变量;
9.步骤(4):提出一种综合计算方法预测lci对交通运营效率不确定性的影响;
10.步骤(5):建立回归支持向量机模型(svr);
11.步骤(6):运用回归支持向量机模型预测lci的流量变化;
12.步骤(7):进行灵敏度分析以检查独立变量对流量变化的影响。
13.进一步的,所述步骤(1)中车辆变道轨迹数据包括:所述车辆变道轨迹数 据包括车辆的速度、加速度、车辆间的距离以及车辆变道前和变道后的位置信息; 获取数据持续时间至少为45分钟,数据需要提供每0.1秒的车辆位置;所述车 辆变道前和变道后的位置信息,包括车辆的横向位置和纵向位置。
14.进一步的,步骤(2)的具体内容如下:
15.剔除在目标车道和原始车道中没有五辆车在车道变换器之前的车道变换操 纵以及在9秒内同一辆车变换两次车道行为的相关数据。
16.进一步的,步骤(3)的具体内容如下:
17.提取的车辆换道行为包含目标车辆的两辆跟随车辆和两辆前车的速度、所有 车辆的位置,插入时所有车辆的速度、加速度以及目标车道与原车道的速度;
18.确定的微观变量包括相邻两辆车间的距离、插入时相邻两辆车的速度差、目 标车道与原车道的速度差、插入时所有车辆的加速度、目标车辆的速度、目标车 道的id序号以及变道方向。
19.进一步的,步骤(4)的具体内容如下:
20.fc的计算将在插入后忽略变速器与其后续车流量之间的速度差和间隙;
21.根据车头时距和流量间的关系,通过时间间隔h估算流量q
[0022][0023]
目标车道中,正常情况下的流量定义为来自一个排的4个车头时 距的平均时间间隔的倒数
[0024][0025]
将q
lc
定义为
[0026][0027]
h
lc
为换道器与其引领车辆间的前进距离;
[0028]
通过比较流速找到由于目标车道中的车道变换引起的流量变化,流量变化 fc计算如下
[0029][0030]
分别测出正常情况下和车道变化情况下的流量,正常情况下原始车道的流量 可用相同的公式计算,q
fb
是原始车道中换道车辆离开后的流量,定义 为
[0031][0032]
h
fb
是插入后九秒钟后车和换道车辆间的车头时距,则
[0033][0034]
因此,由车道变换引起的变化流量定义为δq,计算公式如下
[0035]
δq=fc
tar
fc
ori
。
[0036]
进一步的,步骤(5)的具体内容如下:
[0037]
假设有一定数量的培训数据,x
i
表示输入模式的空间,y
i
表示目标值的空间, 估计输入模式和目标值之间的函数f;
[0038]
为了实现非线性svr,必须使用非线性映射φ将数据映射到执行线性svr的 更高维特征空间,考虑具有映射φ的线性函数,该映射采用该形式
[0039]
f(x)=<ω,φ(x)> b
ꢀꢀꢀ
ω∈r
n
,b∈r
[0040]
<
·
,
·
>表示内在的产品r
n
,ω控制模型的平整度,φ(x)是一个映射函数。 <ω,φ(x)> b是用于在高维特征空间中训练数据的预测函数。因此,最优回 归函数由以下函数的最小值给出:
[0041][0042]
其中c是预先指定的值,ξ
i
是损失函数,和η
i
和是松散的变量。由 和可以重新确定svr问题,作为对以下 二次规划问题的最优解的确定
[0043][0044]
受制于<ω,φ(x)> b-y
i
≤η
i
ε
[0045][0046][0047]
为了解决这个二次规划问题,通过引入双重变量集,基于目标函数和相应 约束构造拉格朗日函数解决方案如下:
[0048][0049]
使用二次损失函数ξ(η)=η2如ξ并将使用
[0050][0051]
的rbf内核实现到特征空间的非线性映射
[0052]
k(x,x
i
)=exp(-||x-x
i
||2/2δ2)
[0053]
则svr的优化问题变为
[0054][0054]
受制于
[0055]
进一步的,步骤(6)的具体内容如下:
[0056]
将lci建模视为回归问题,使用经验数据拟合操作;
[0057]
原始数据集随机分为训练集和比例为4:1的测试集,使用数据标准化到<0,1> 间隔进行预测,运用确定参数的网格搜索算法(c,γ),对流量变化进行10次 不同训练集和测试集的实验,得到预测结果,其中输入矢量为表示交通状态的变 量,输出矢量为fc。
[0058]
进一步的,步骤(7)的具体内容如下:
[0059]
将每个变量设置为从平均值增加或减少一个标准偏差,确保变化在合理的范 围内;每次更改一个变量,其他变量保持不变,可以确定lci对哪个变量更敏感; 再进一步对目标车辆的速度和加速度、原车道和目标车道的速度差的进行灵敏度 分析。
[0060]
有益效果:本发明运用车辆轨迹的车道变换记录来探索lci,可以准确 地预测不同的微观交通变量对流量变化的影响,从而到最佳的的换道策略,保证 高速公路的快捷高效地运行。
附图说明
[0061]
图1为本发明预测方法的流程图。
[0062]
图2a正常情况下和车道变化情况下的目标车道的流量。
[0063]
图2b正常情况下和车道变化情况下的原车道的流量。
[0064]
图3a r2=0.98076下,利用svr模型预测流量变化的结果图。
[0065]
图3b r2=0.95344下,利用svr模型预测流量变化的结果图。
[0066]
图4a车辆间隙对流量变化的灵敏度分析图。
[0067]
图4b速度差对流量变化的分析图。
[0068]
图4c对目标车辆的速度、加速度、原车道和目标车道的速度差进行灵敏度分 析图。
具体实施方式
[0069]
下面结合附图对本发明进行详细说明:
[0070]
如图1所示,一种车辆换道对交通运行效率影响的预测方法,包括以下步骤:
[0071]
(1)本方法需要获取车辆变道轨迹数据:
[0072]
所述车辆变道轨迹数据包括车辆的速度、加速度、车辆间的距离以及车辆变 道前和变道后的位置信息;数据持续时间至少为45分钟,数据需要提供每0.1 秒的车辆位置;
[0073]
所述车辆变道前和变道后的位置信息,包括车辆的横向位置和纵向位置;
[0074]
(2)分析车辆变道轨迹数据,进行质量控制:
[0075]
剔除在目标车道和原始车道中没有五辆车在车道变换器之前的车道变换操 纵以及在9秒内同一辆车变换两次车道行为的相关数据;
[0076]
(3)提取车辆换道行为,确定微观变量:
[0077]
提取的车辆换道行为包含目标车辆的两辆跟随车辆和两辆前车的速度、所有 车辆的位置,插入时所有车辆的速度、加速度以及目标车道与原车道的速度;
[0078]
确定的微观变量包括相邻两辆车间的距离、插入时相邻两辆车的速度差、目 标车道与原车道的速度差、插入时所有车辆的加速度、目标车辆的速度、目标车 道的id序号以及变道方向;
[0079]
(4)提出一种综合计算方法预测lci对交通运营效率不确定性的影响:
[0080]
fc的计算将在插入后忽略变速器与其后续车流量之间的速度差和间隙;
[0081]
根据车头时距和流量间的关系,通过时间间隔h估算流量q
[0082][0083]
目标车道中,正常情况下的流量定义为来自一个排的4个车头时 距的平均时间间隔的倒数
[0084][0085]
将q
lc
定义为
[0086][0087]
h
lc
为换道器与其引领车辆间的前进距离;
[0088]
通过比较流速找到由于目标车道中的车道变换引起的流量变化,流量变化 fc计算如下
[0089][0090]
分别测出正常情况下和车道变化情况下的流量,如图2(a)计算出的是目 标车道的流量,图2(b)计算出的是原车道的流量。正常情况下原始车道的流量 可用相同的公式计算,q
fb
是原始车道中换道车辆离开后的流量,定义 为
[0091][0092]
h
fb
是插入后九秒钟后车和换道车辆间的车头时距,则
[0093][0094]
因此,由车道变换引起的变化流量定义为δq,计算公式如下
[0095]
δq=fc
tar
fc
ori
[0096]
(5)建立回归支持向量机模型(svr):
[0097]
假设有一定数量的培训数据,x
i
表示输入模式的空间,y
i
表示目标值的空间, 估计输入模式和目标值之间的函数f;
[0098]
为了实现非线性svr,必须使用非线性映射φ将数据映射到执行线性svr的 更高维特征空间,考虑具有映射φ的线性函数,该映射采用该形式
[0099]
f(x)=<ω,φ(x)> b
ꢀꢀꢀ
ω∈r
n
,b∈r
[0100]
<
·
,
·
>表示内在的产品r
n
,ω控制模型的平整度,φ(x)是一个映射函数。 <ω,φ(x)> b是用于在高维特征空间中训练数据的预测函数。因此,最优回 归函数由以下函数的最小值给出:
[0101][0102]
其中c是预先指定的值,ξ
i
是损失函数,和η
i
和是松散的变量。由 和可以重新确定svr问题,作为对以下 二次规划问题的最优解的确定
[0103][0104]
受制于<ω,φ(x)> b-y
i
≤η
i
ε
[0105][0106][0107]
为了解决这个二次规划问题,通过引入双重变量集,基于目标函数和相应 约束构造拉格朗日函数解决方案如下:
[0108][0109]
使用二次损失函数ξ(η)=η2如ξ并将使用
[0110][0111]
的rbf内核实现到特征空间的非线性映射
[0112]
k(x,x
i
)=exp(-||x-x
i
||2/2δ2)
[0113]
则svr的优化问题变为
[0114][0114]
受制于
[0115]
(6)运用回归支持向量机模型预测lci的流量变化:
[0116]
将lci建模视为回归问题,使用经验数据拟合操作;
[0117]
原始数据集随机分为训练集和比例为4:1的测试集,使用数据标准化到<0,1> 间隔进行预测,运用确定参数的网格搜索算法(c,γ),对流量变化进行10次 不同训练集和测试集的实验,得到预测结果,结果图见图3;其中输入矢量为表 示交通状态的变量,输出矢量为fc。
[0118]
(7)进行灵敏度分析以检查独立变量对流量变化的影响:
[0119]
将每个变量设置为从平均值增加或减少一个标准偏差,确保变化在合理的范 围内;每次更改一个变量,其他变量保持不变,可以确定lci对哪个变量更敏感; 图4(a)是间隙对流量变化的分析图,图4(b)是速度差对流量变化的分析图;
[0120]
再进一步对目标车辆的速度和加速度、原车道和目标车道的速度差的进行灵 敏度分析,分析图见图4(c),结果表明,这三个值对流量变化都有积极的影响。
[0121]
综上所述,车辆变道对运行效率影响的预测方法有效。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。