1.本发明属于无源微波遥感与探测技术领域,更具体地,涉及一种基于毫米波辐射的目标表面法向量获取方法及系统。
背景技术:
2.一切物理温度高于0k的物体都会以电磁波的形式自发地向空间辐射电磁能量,这一现象叫做热辐射。毫米波辐射计通过接收毫米波频段的热辐射信号来实现对目标的遥感与探测,这种技术通常被称为无源毫米波辐射测量技术。毫米波辐射测量具有全天时、准全天候工作,隐蔽性和一定程度上穿透大气、衣物、烟雾等的优点,因此已应用到诸如遥感、安检、目标探测、天文学等领域。
3.极化是电磁辐射的一类特征。由于电磁辐射的极化与目标的材质组成、形状和表面特征等因素有关,因此毫米波辐射极化成像中包含了丰富的目标信息。表面法向量是目标的重要特征,对于目标识别和三维结构重建具有重要意义。在基于被动毫米波成像的人体安检和军事目标探测等领域中,可为目标识别提供信息。此外,可以将目标表面看作很多微小面元的组合,若对每一个面元获取其法向量,则可以进而完成对目标的三维重建。中国发明专利cn2019104470704中公开了一种由毫米波极化辐射成像中获取目标表面法向量的方法,但此方法需要从两个观测角度对目标进行测量。如何仅从一个观测角度对目标进行测量即可获取目标表面法向量还有待研究。
技术实现要素:
4.针对现有技术的缺陷,本发明的目的在于提供一种基于毫米波辐射的目标表面法向量获取方法及系统,仅从一个观测方向对目标进行测量,通过极化毫米波辐射测量提取目标表面法向量这一重要的目标结构信息,提高利用毫米波辐射测量技术对被观测场景中的立体目标进行检测和识别的能力。
5.为实现上述目的,按照本发明的一个方面,提供了一种基于毫米波辐射的目标表面法向量获取方法,包括以下步骤:
6.s1:在方位角为天顶角为θ的观测方向上以n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)分别对置于无极化辐射环境中的待测目标进行测量,获得目标表面s的线极化亮温(t1,t2,
…
,t
n
),其中n≥3;
7.s2:根据所述n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)以及对应的线极化亮温(t1,t2,
…
,t
n
)获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
;
8.s3:测量得到环境亮温t
inc
和目标物理温度t
obj
;
9.s4:根据s2中得到的水平极化亮温t
h
和垂直极化亮温t
v
以及s3中得到的环境亮温t
inc
和目标物理温度t
obj
获得目标表面s的入射角θi;
10.s5:根据方位角天顶角θ以及表面s的相位角α0和入射角θ
i
计算目标表面s的法向量。
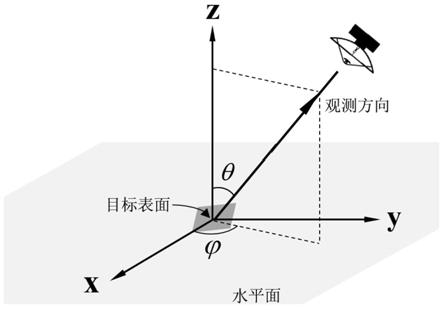
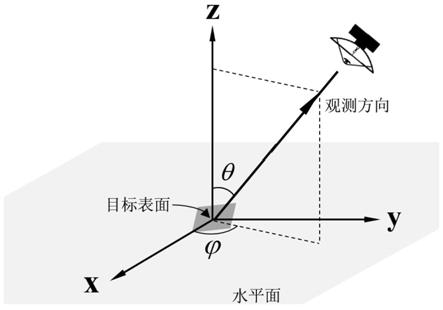
11.进一步地,上述各参量均定义于同一三维笛卡尔坐标系中,该坐标系的xoy平面为水平面。
12.更进一步地,观测方位角定义为观测方向在xoy平面的投影与x轴的夹角,观测天顶角θ定义为观测方向与z轴的夹角,0
°
≤θ<180
°
;天线极化旋转角度β定义为天线口面的磁场h方向所在的直线由辐射计垂直极化方向逆时针旋转至实际观测极化所旋转的角度,0
°
≤β<180
°
,辐射计垂直极化方向为
13.优选地,由于测量误差的存在,线极化亮温(t1,t2,
…
,t
n
)之间的数值差异越大,越能够提升本方法的鲁棒性。因此,天线极化旋转角度之间的度数差距应当尽可能大。例如,以三种不同的天线极化旋转角度进行测量时,天线极化旋转角度应当选取0
°
、60
°
和120
°
以使本方法获得较优的精度;以四种不同的天线极化旋转角度进行测量时,天线极化旋转角度应当选取0
°
、45
°
、90
°
和135
°
以使本方法获得较优的精度。
14.更进一步地,若测量得到的线极化亮温(t1,t2,
…
,t
n
)均相等,则认为目标表面s的法向量为
15.更进一步地,s2中根据余弦曲线方程组获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
,其中,i∈{1,2,
…
,n}。
16.更进一步地,s4中根据方程组
[0017][0018][0019]
获得目标表面s的入射角θ
i
。
[0020]
更进一步地,s5中根据公式
[0021][0022]
计算表面s的法向量。
[0023]
按照本发明的另一方面,提供了一种基于毫米波辐射的目标表面法向量获取系统,包括:
[0024]
线极化亮温获取模块,在方位角为天顶角为θ的观测方向上以n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)分别对置于无极化辐射环境中的待测目标进行测量,获得目标表面s的线极化亮温(t1,t2,
…
,t
n
);其中,n≥3;
[0025]
表面相位角获取模块,根据所述n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)以及对应的线极化亮温(t1,t2,
…
,t
n
)获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮
温t
v
;
[0026]
法向量获取模块,测量得到环境亮温t
inc
和目标物理温度t
obj
,结合表面相位角获取模块得到的水平极化亮温t
h
和垂直极化亮温t
v
获得目标表面s的入射角θ
i
,根据方位角天顶角θ以及表面s的相位角α0和入射角θ
i
计算目标表面s的法向量。
[0027]
优选地,若测量得到的线极化亮温(t1,t2,
…
,t
n
)均相等,则认为目标表面s的法向量为
[0028]
通过本发明所构思的以上技术方案,与现有技术相比,能够取得以下有益效果:
[0029]
1、本发明提供的获取目标表面法向量的方法仅从一个观测方向对目标进行测量,通过测量其不同线极化的亮温进而代入方程中依次得到表面的相位角和入射角,最终计算得到表面的法向量;
[0030]
2、本发明提供的获取目标表面法向量的方法仅从一个观测方向对目标进行测量即可提取立体目标的表面法向量,相比现有技术需要从两个观测方向对目标进行测量的局限,目标几何信息获取能力得到提高。
附图说明
[0031]
图1是本发明提供的目标表面法向量获取方法的方位角和天顶角的示意图;
[0032]
图2是本发明实施例提供的目标表面法向量获取方法的实际应用场景示意图;
[0033]
图3是本发明实施例提供的目标表面法向量获取方法的在0
°
、30
°
、60
°
、90
°
、120
°
和150
°
等6个不同的天线极化旋转角度下,对目标进行测量,获得目标表面各处相应的线极化亮温示意图;
[0034]
图4是本发明实施例提供的应用本方法获取的目标表面各处的水平极化亮温和垂直极化亮温;
[0035]
图5是本发明实施例提供的应用本方法获取的目标表面各处的两种可能的相位角的示意图;
[0036]
图6是本发明实施例提供的应用本方法获取的目标表面各处的入射角的示意图;
[0037]
图7是本发明实施例提供的应用本方法获取的目标表面各处的两种可能的法向量的示意图。
具体实施方式
[0038]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0039]
本发明提供了一种基于毫米波辐射的目标表面法向量获取方法,包括以下步骤:
[0040]
s1:在方位角为天顶角为θ的观测方向上以n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)分别对置于无极化辐射环境中的待测目标进行测量,获得目标表面s的线极化亮温(t1,t2,
…
,t
n
),其中n≥3;
[0041]
其中各参量均定义于同一三维笛卡尔坐标系中,该坐标系的xoy平面为水平面。如图1所示,观测方位角定义为观测方向在xoy平面的投影与x轴的夹角,观测
天顶角θ定义为观测方向与z轴的夹角,0
°
≤θ<180
°
;天线极化旋转角度β定义为天线口面的磁场h方向所在的直线由辐射计垂直极化方向逆时针旋转至实际观测极化所旋转的角度,0
°
≤β<180
°
,辐射计垂直极化方向为:
[0042]
s2:根据所述n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)以及对应的线极化亮温(t1,t2,
…
,t
n
)获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
;
[0043]
其中,可以根据余弦曲线方程获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
,其中,i∈{1,2,
…
,n}。
[0044]
若测量得到的线极化亮温(t1,t2,
…
,t
n
)均相等,则认为目标表面s的法向量为
[0045]
s3:测量得到环境亮温t
inc
和目标物理温度t
obj
。
[0046]
s4:根据s2中得到的水平极化亮温t
h
和垂直极化亮温t
v
以及s3中得到的环境亮温t
inc
和目标物理温度t
obj
获得目标表面s的入射角θ
i
;
[0047]
其中,可以根据方程组
[0048][0049][0050]
获得目标表面s的入射角θ
i
。
[0051]
s5:根据方位角天顶角θ以及表面s的相位角α0和入射角θ
i
计算目标表面s的法向量;
[0052]
其中,可以根据公式
[0053][0054]
计算表面s的法向量。
[0055]
本发明还提供了一种基于毫米波辐射的目标表面法向量获取系统,如图2所示,包括:
[0056]
线极化亮温获取模块,在方位角为天顶角为θ的观测方向上以n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)分别对置于无极化辐射环境中的待测目标进行测量,获得目标表面s的线极化亮温(t1,t2,
…
,t
n
);其中,n≥3;
[0057]
表面相位角获取模块,根据所述n种不同的天线极化旋转角度(β1,β2,
…
,β
n
)以及对应的线极化亮温(t1,t2,
…
,t
n
)获得目标表面s的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
;
[0058]
法向量获取模块,测量得到环境亮温t
inc
和目标物理温度t
obj
,结合表面相位角获取模块得到的水平极化亮温t
h
和垂直极化亮温t
v
获得目标表面s的入射角θ
i
,根据方位角天顶角θ以及表面s的相位角α0和入射角θ
i
计算目标表面s的法向量。
[0059]
图2是本发明实施例提供的目标表面法向量获取方法的实际应用场景示意图。观测目标是一个半径为0.5m的球体,观测距离为3m。
[0060]
(1)辐射计以6种不同的天线极化旋转角度(0
°
、30
°
、60
°
、90
°
、120
°
、150
°
)分别对置于无极化辐射环境中的观测目标进行测量,获得目标的线极化亮温图像,如图3所示。图像像素点个数为100
×
100,图中各个像素点所在目标表面的观测方位角和天顶角θ为:
[0061][0062]
θ=100.2
°-
0.2
°×
m
[0063]
m,n∈{1,2,
…
,100}
[0064]
其中,m,n分别为各个像素点所在的行和列。
[0065]
(2)根据步骤1中的天线极化旋转角度(0
°
、30
°
、60
°
、90
°
、120
°
、150
°
)以及对应的各个像素点的线极化亮温获得各个像素点所在的目标表面的相位角α0、水平极化亮温t
h
和垂直极化亮温t
v
。图4是本发明实施例提供的应用本方法获取的目标表面各处的水平极化亮温和垂直极化亮温;图5是本发明实施例提供的应用本方法获取的目标表面各处的两种可能的相位角的示意图。
[0066]
(3)测量得到环境亮温t
inc
为150k,目标物理温度t
obj
为298k。
[0067]
(4)根据步骤2中得到目标表面各处的水平极化亮温和垂直极化亮温以及步骤3中得到的环境亮温t
inc
和目标物理温度t
obj
获得目标表面各处的入射角θ
i
。图6是本发明实施例提供的应用本方法获取的目标表面各处的入射角。
[0068]
(5)根据目标表面各处的方位角天顶角θ以及其相位角和入射角计算目标表面各处的法向量。由于目标表面各处的相位角有两种可能的结果,因此目标表面各处的法向量也有两种可能的结果。图7是本发明实施例提供的应用本方法获取的目标表面各处的两种可能的法向量。
[0069]
目标表面的法向量获取,有诸多的应用潜力。例如应用到人体隐匿违禁物品的检测中,本发明提供的一种基于毫米波辐射的目标表面法向量获取的方法,可以依托于无源毫米波成像手段,获得可描述目标形状结构特征的目标表面法向量信息,从而有助于违禁品的识别。例如在无人驾驶中,在烟雾场景下,红外和光学手段受到干扰,可以借助于本方法获取道路表面各处的法向量,有助于障碍物检测和道路坡度估计。此外,目标表面法向量的获取还是目标三维结构重建的重要一步。
[0070]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。