1.本实用新型属于半导体封装领域,尤其是一种将精密电子或光学部件,精确地贴合于指定位置的部件取放贴合系统。
背景技术:
2.半导体封装制程主要包含研磨、拣选、切割、贴合、封胶等阶段,而本实用新型所属的部件取放贴合系统,则用于在贴合阶段中,将已切割成晶粒的部件,转移并贴合于指定基板上。
3.为了使晶粒得以精确地安装在指定位置,有专利前案中国台湾地区第 tw107114542号专利申请案(美国第us15/947,571号专利申请案、中国第cn201810391562.1a号专利申请案、日本第jp2018
‑
190958a号专利申请案、韩国第kr1020180048520a号专利申请)揭露一种将部件安装在基板上的设备和方法,其利用一个部件相机拍摄部件的部件标记后,将部件夹持器移至基板相机下方,并利用基板相机拍摄部件夹持器的基准标记,再将部件夹持器移开,而使基板相机得以拍摄到位于基板相机下方的基板的基板标记,最后再一次将部件夹持器移至基板相机下方,且拍摄部件夹持器的基准标记,并依据基准标记的位置及基板标记的位置,将部件对准于基板上。
4.然而,前述中国台湾地区第tw107114542号专利申请案在进行对准时,必须不断地移动部件夹持器,而每一次地移动都会造成误差,以致于先前技术的精准度仅介于二至三微米之间,故无法应付现今半导体制造对于封装制程的精准度要求。
5.此外,碍于晶体管的尺寸已逼近物理极限,为延续摩尔定律,半导体制造无不朝向三维芯片封装发展,亦即基板之上将还会有多层晶粒,但前述第 tw107114542号专利申请案,碍于其相机为固定景深之故,无法随着基板上堆栈的晶粒高度,而调整相机景深。
6.本创作人鉴于上述先前技术的各项缺点,乃亟思加以改良创新,并经多年的研究实验后,终于成功研发完成本实用新型的部件取放贴合系统。
技术实现要素:
7.本实用新型为一种部件取放贴合系统,其目的在于:
8.1.提升部件贴合技术的精准度至次微米(sub
‑
micron)等级;
9.2.解决先前技术的相机景深,无法随基板上堆栈的晶粒高度而调整的问题。
10.本实用新型的部件取放贴合系统包含支撑架、取放本体、部件观测模块、基板观测模块、承载座及处理模块,其中基板观测模块有二个,分别为第一基板观测模块及第二基板观测模块,部件观测模块仅有一个,但第二基板观测模块系由二个部件观测单元所组成,分别为第一部件观测单元及第二部件观测单元。
11.其中,基板观测模块设在支撑架上,且基板观测模块的观测方向朝向承载座,其中基板观测模块包含第一基板观测组件与第二基板观测组件,而第一基板观测组件则系由一个第一音圈马达与一个第一基板观测单元相接而成,第二基板观测组件则由第二音圈马达
与第二基板观测单元相接而成,其中第一基板观测组件系用于观测基板的基板标签,第二基板观测组件则用于观测部件的部件标签。
12.其中,取放本体设在支撑架的滑轨上,令取放本体可以在部件观测模块、第一基板观测模块与第二基板观测模块之间移动。
13.其中,取放本体还包含一个透明的取放单元,且在取放单元的左右两侧分别设有一个取放标签,而取放单元用于将部件由部件待置处移动至承载座上的基板。
14.其中,处理单元用于操控取放本体、部件观测模块、基板观测模块及承载座,以及执行影像增强步骤(image upscale),而使该基板观测模块及该部件观测模块的观测精准度达次微米等级。
15.其中,影像增强步骤为次像素边缘步骤(sub pixel edge)、先进适应性内插步骤(advanced adaptive interpolation)、超分辨率步骤(super resolution)的其中之一或二者以上的组合。
16.其中,将部件放置在指定位置上的过程,是由取放单元及承载盘协力完成,且承载盘的移动为零背隙。
17.如上所述,本实用新型的部件取放贴合系统,利用部件观测模块,同时观测部件的部件标签及取放单元的取放标签,再利用本实用新型的基板观测模块,同时观测基板的基板标签及取放单元的取放标签,最后利用取放本体将部件对准放置于基板上,而达到次微米等级的高精度部件贴合。
附图说明
18.图1为本实用新型的基板观测系统的示意图;
19.图2为本实用新型的部件取放贴合系统的示意图;
20.图3为本实用新型的部件取放贴合方法的步骤图;
21.图4为部件取放贴合系统的实施例拾取部件的示意图;
22.图5为部件取放贴合系统的实施例对准部件的示意图;
23.图6为本实用新型的第二实施例的示意图。
24.【符号说明】
25.1:支撑架
26.2:第一基板观测模块
27.211:第一基板观测单元
28.21:第一基板观测组件
29.212:第一音圈马达
30.22:第二基板观测组件
31.221:第二基板观测单元
32.222:第二音圈马达
33.3:第二基板观测模块
34.31:第三基板观测组件
35.311:第三基板观测单元
36.312:第三音圈马达
37.32:第四基板观测组件
38.321:第四基板观测单元
39.322:第四音圈马达
40.4:部件观测模块
41.41:第一部件观测单元
42.42:第二部件观测单元
43.5:取放本体
44.51:取放单元
45.52:左取放标签
46.53:右取放标签
47.6:承载座
48.7:处理模块
49.8:部件
50.81:左部件标签
51.82:右部件标签
52.9:基板
53.91:左基板标签
54.92:右基板标签
55.10:第二部件
56.101:左第二部件标签
57.102:右第二部件标签
58.s101
‑
s110:步骤
具体实施方式
59.为了使所属技术领域中具有通常识者能够充分了解本实用新型的技术特征、内容与优点及其所能达到的功效,兹将本实用新型配合附图,并以实施例的表达形式详细说明如下,而其中所使用的图式,其主旨仅为示意及辅助说明书之用,未必为本实用新型实施后的真实比例与精准配置,故不应就所附的图式的比例与配置关系解读、局限本实用新型于实际实施上的权利范围,合先叙明。
60.请参阅图1,其为本实用新型的基板观测系统的示意图,如图所示,本实用新型的基板观测系统包含支撑架1、第一基板观测模块2及第二基板观测模块3,其中第二基板观测模块3的机构设计与第一基板观测模块2相同,且二者皆安装于支撑架1上。
61.其中,第一基板观测模块2包含第一基板观测组件21及第二基板观测组件 22,彼此相邻且间距甚微。
62.其中,第一基板观测组件21包含第一基板观测单元211及第一音圈马达212,藉由第一音圈马达212,可以控制第一基板观测单元211与一基板之间的距离。
63.其中,第二基板观测组件22包含第二基板观测单元221及第二音圈马达222,藉由第二音圈马达222,可以控制第二基板观测单元221与一取放单元之间的距离。
64.其中,第二基板观测模块3包含第三基板观测组件31及第四基板观测组件 32,第
三基板观测组件31包含第三基板观测单元311及第三音圈马达312,第四基板观测组件32包含第四基板观测单元321及第四音圈马达322,而且第二基板观测模块3的机构关系与第一基板观测模块2相同,故不赘述。
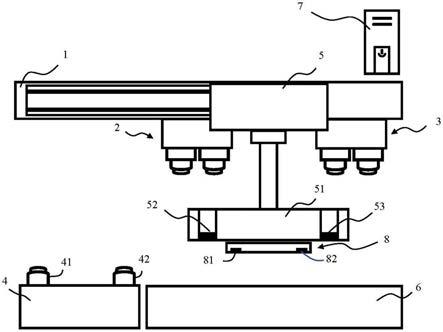
65.请参阅图2,其为本实用新型的部件取放贴合系统的示意图,如图所示,本实用新型的部件取放贴合系统包含支撑架1、第一基板观测模块2、第二基板观测模块3、部件观测模块4、取放本体5、承载座6及处理模块7。
66.其中,支撑架1为多轴对位平台的托架,位于承载座6的上方,其中取放本体5设于支撑架1上,并利用支撑架1的驱动系统,令取放本体5在一定的移动范围内移动,其中取放本体5朝向承载座6的一端,设有取放单元51,且在取放单元51的左右两侧边方别设有左取放标签52及右取放标签53。
67.其中,第一基板观测模块2及第二基板观测模块3皆安装于支撑架1上,且第一基板观测模块2及第二基板观测模块3相隔一间距,而使第一基板观测模块2在观测左取放标签52的同时,第二基板观测模块3也可以观测右取放标签53。
68.其中,部件观测模块4设在取放本体5的移动范围内,且部件观测模块4 包含第一部件观测单元41及第二部件观测单元42,当取放本体5上附有部件8,且取放本体5移动至观测模块4的上方时,第一部件观测单元41观测部件8的左部件标签81,而第二部件观测单元42观测右部件标签82,二者协同运作而产生影像数据。
69.其中,承载座6为一个无背隙的移动平台。
70.其中,处理模块7与支撑架1、第一基板观测模块2、第二基板观测模块3、部件观测模块4、取放本体5、承载座6连接,且处理模块7接收来自第一基板观测模块2、第二基板观测模块3及部件观测模块4的影像数据,并以影像增强步骤(image upscale)提升影像数据的分辨率,再依据影像数据产生位置信息,然后依据位置信息操控支撑架1、取放本体5及承载座6,而执行部件8与基板 9的对准/放置贴合任务。
71.请参阅图3,其为本实用新型的取放贴合方法的步骤图。本实用新型的取放方法包含:
72.s101:取放本体移动至部件待置处,并运用取放单元拾取部件;
73.s102:取放本体移动至部件观测模块上方;
74.s103:部件观测单元观测部件的部件标签及取放单元的取放标签,而获得第一影像数据,再以影像增强步骤获得第一高解析影像数据;
75.s104:基于第一高解析影像数据,判断部件标签及取放标签在x方向的差值(δx1),以及部件标签及取放标签在y方向的差值(δy1),而获得第一位置信息,其中第一位置信息是由x方向的差值(δx1)及y方向的差值(δx1)组成的向量信息(δx1,δy1);
76.s105:取放本体移动至基板的指定位置上方,并将基板观测模块移动至取放本体上方;
77.s106:利用第一音圈马达调整第一基板观测单元与基板之间的距离,而使基板的基板标签得位于第一基板观测单元的景深范围内,以及利用第二音圈马达调整第二基板观测单元与取放单元之间的距离,而使取放单元的取放标签得位于第二基板观测单元的景深范围内;
78.s107:基板观测模块观测基板的基板标签及取放单元的取放标签,而获得第二影
像数据,再以影像增强步骤获得第二高解析影像数据;
79.s108:基于第二高解析影像数据,判断基板标签及取放标签在x方向的差值(δx2),以及基板标签及取放标签在y方向的差值(δy2),而获得第二位置信息,其中第二位置信息系由x方向的差值(δx2)及y方向的差值(δx2)组成的向量信息(δx2,δy2);
80.s109:将部件标签及取放标签在x方向的差值的绝对值(|δx1|),与基板标签及取放标签在x方向的差值的绝对值(|δx2|)相加,而获得部件标签及基板标签在x方向的差值(δx3);
81.将部件标签及取放标签在y方向的差值的绝对值(|δy1|),与基板标签及取放标签在y方向的差值的绝对值(|δy2|)相加,而获得部件标签及基板标签在y 方向的差值(δy3);
82.藉由上述步骤s109,而获得第三位置信息,其中第三位置信息是由x方向的差值(δx3)及y方向的差值(δx3)组成的向量信息(δx3,δy3);
83.s110:承载座依据第三位置信息作零背隙的移动,而使部件与基板上的指定位置对准,再由取放单元将部件放置于基板上。
84.请参阅图4,其为部件取放贴合系统的实施例拾取部件的示意图,如图所示,在本实用新型的实施例中,部件取放贴合系统包含第一基板观测模块2、第二基板观测模块3、部件观测模块4、取放本体5、承载座6及处理模块7。
85.其中,取放本体5包含取放单元51,且在取放单元51的左右两侧边分别设有左取放标签52及右取放标签53,取放单元51拾取一个部件8,而在部件8 的左右两侧边方别设有左部件标签81及右部件标签82。
86.其中,取放单元51移至部件观测模块4的上方,而使第一部件观测单元41 得同时观测左取放标签52及左部件标签81,也使第二部件观测单元42得同时观测右取放标签53及右部件标签82,藉以获得第一影像数据,并实时传送至处理模块7。
87.处理模块7收到第一影像数据后,藉由影像增强步骤(image upscale)提升第一影像数据的分辨率,而转换成第一高解析影像数据,再判断左取放标签 52及左部件标签81之间的相对位置,以及右取放标签53及右部件标签82之间的相对位置,而获得第一位置信息。
88.请参阅图5,其为部件取放贴合系统的实施例对准部件的示意图,如图所示,在本实施例中,取放本体5将部件8移至基板9的指定位置上方,同时第一基板观测模块2及第二基板观测模块3也移动至取放本体5上方。
89.其中,在基板9的左右两侧分别设有左基板标签91及右基板标签92。
90.其中,第一基板观测模块2以第一音圈马达212将第一基板观测单元211 朝基板9方向伸出,而使基板9的左基板标签91进入第一基板观测单元211的景深范围,第二基板观测模块3以第四音圈马达322将第四基板观测单元321 朝基板9方向伸出,而使将基板9的右基板标签92进入第四基板观测单元321 的景深范围。
91.其中,第一基板观测模块2以第二音圈马达222将第二基板观测单元24朝取放单元51方向靠近,而使取放单元51的左取放标签52进入第二基板观测单元221的景深范围,第二基板观测模块3以第三音圈马达312将第三基板观测单元311朝取放单元51方向靠近,而使取放单元51的右取放标签53进入第三基板观测单元311的景深范围。
92.其中,第一基板观测模块2同时观测左取放标签52及左基板标签91,第二基板观测
模块3同时观测右取放标签53及右基板标签92,藉由第一基板观测模块2及第二基板观测模块3的协作,以取得第二影像数据,并实时传送至处理模块7。
93.处理模块7收到第二影像数据后,藉由影像增强步骤(image upscale)提升第二影像数据的分辨率,而转换成第二高解析影像数据,再判断左取放标签 52及左基板标签91之间的相对位置,以及右取放标签53及右基板标签92之间的相对位置,而获得第二位置信息。
94.处理模块7再以步骤s109,获得第三位置信息。
95.取放本体5及承载座6再以步骤s109,将部件8准确地放置贴合于基板9 的指定位置,且其精准度达次微米(sub
‑
micron)等级。
96.请参阅图6,其为本实用新型的第二实施例的示意图,如图所示,本实施例,在基板9上方已堆栈有多层的第二部件10,其中在第二部件10上设有左第二部件标签101及右第二部件标签102。
97.在本实施例中,第一音圈马达212调整第一基板观测单元211与第二部件 10之间的距离,而使左第二部件标签101得位于第一基板观测单元211的景深之内。
98.在本实施例中,第四音圈马达322调整第四基板观测单元321与第二部件 10之间的距离,而使右第二部件标签102得位于第四基板观测单元321的景深之内。
99.在本实施例中,第二音圈马达222与第三音圈马达312分别调整第二基板观测单元221及第三基板观测单元311与取放单元51之间的距离,而使左取放标签52及右取放标签53得分别位于第二基板观测单元221及第三基板观测单元311的景深之内。
100.藉由,第一音圈马达212、第二音圈马达222、第三音圈马达312及第四音圈马达322的协作,本实用新型的部件取放贴合系统可以适应各种基板9、部件 8、第二部件10的厚度,也可以弹性的调整高度,而完成多层部件8的堆栈作业。
101.其中,本实用新型的部件8为覆晶,也可以是任何的半导体晶粒。在一些实施例中,部件8可以是电子、光学、光电或任何其他的部件。
102.其中,基板观测单元为本领域通常的高解析ccd摄影机或cmos摄影机。
103.综上所述,本实用新型的部件取放贴合系统及取放方法,在进行部件8与基板9之间的对准贴合时,其精准度达次微米等级;此外,本实用新型的基板观测模块所包含的音圈马达,具有调整基板观测单元与基板之间距离的功能,而解决本领域的高解析ccd摄影机或cmos摄影机的景深窄短,而难以应付三维晶粒封装制程中,多元高度需求的问题。
104.以上所述仅为举例性,用以说明本实用新型的技术内容的可行具体实施例,而非用于限制本实用新型。本实用新型所属技领域具有通常知识者基于说明书中所揭示内容的教示所为的等效置换、修改或变更,均包含于本实用新型的申请专利范围中,未脱离本实用新型的权利范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。