1.本实用新型涉及园林技术领域,尤其涉及一种园林施工用剪枝装置。
背景技术:
2.目前,在园林施工过程中,通常需要对园林树枝进行剪枝,在我国剪枝仍以人工作业为主,传统的剪枝机大多为手动操作,剪枝速度慢,耗费时间多,劳力消耗大;并且在对较高的树进行剪枝时,由于剪枝工具的手柄较短往往需要使用梯架登高后才能进行剪枝的操作,非常麻烦,不能满足现有的使用需要。为此,本实用新型中提供了一种园林施工用剪枝装置用于解决上述问题。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种园林施工用剪枝装置。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种园林施工用剪枝装置,包括壳体,所述壳体的底部固定焊接有手持管,壳体的顶部为开口设置,且壳体顶部开口的左侧转动安装有左剪切刀头,壳体顶部开口的右侧转动安装有右剪切刀头,壳体的顶部开口内转动安装有左转轴和位于左转轴右侧的右转轴,且左剪切刀头的底端固定套接在左转轴上,左转轴上还固定套接有左从动轮,左从动轮的下侧通过左链条传动连接有左传动轮,左传动轮上固定套接有左传动轴,且左传动轴转动安装在壳体内,左传动轴上还固定套接有左蜗轮,左蜗轮的下方转动设置有蜗杆,壳体的左侧内壁上固定安装有步进电机,且步进电机的输出端与蜗杆的左端固定连接,所述蜗杆的圆周上固定设置有左蜗杆牙和位于左蜗杆牙右侧的右蜗杆牙,且左蜗杆牙与左蜗轮相啮合;右蜗杆牙上啮合有右蜗轮,右蜗轮上固定套接有右传动轴,且右传动轴转动安装于壳体内,右传动轴上还固定套接有右传动轮,右传动轮上通过右链条传动连接有右从动轮,且右从动轮固定套接在右转轴上。
6.优选的,所述手持管的内部活动套接有长杆,且长杆的底端延伸至手持管的下方,手持管的左侧还通过螺纹安装有用于对长杆进行锁紧固定的锁紧螺栓。
7.优选的,所述手持管的右侧设置有第一无线遥控开关,长杆的右侧底部设置有第二无线遥控开关,壳体内设置有用于整个装置供电的第一电源,长杆的底端还设有用于第二无线遥控开关供电的第二电源,所述第一无线遥控开关和第二无线遥控开关分别与步进电机电性控制连接。
8.优选的,所述蜗杆上的左蜗杆牙与右蜗杆牙的旋向相反设置。
9.优选的,所述壳体的右侧内壁上设置有转动座,且蜗杆的右端转动安装在转动座上。
10.优选的,所述步进电机的输出端固定设置有联轴器,且步进电机的输出端通过联轴器与蜗杆的左端连接固定。
11.与现有技术相比,本实用新型的有益效果是:
12.1、本实用新型中,通过步进电机带动蜗杆转动,蜗杆转动时通过左蜗杆牙与左蜗轮进行啮合传动,进而带动左传动轴以及左传动轮旋转,左传动轮又通过左链条带动左从动轮以及左转轴旋转,左转轴又带动左剪切刀头旋转;与此同时,蜗杆转动时还通过右蜗杆牙与右蜗轮啮合传动配合,来带动右传动轴以及右传动轮旋转,右传动轮旋转又通过右链条带动右从动轮以及右转轴旋转,右转轴旋转时又带动右剪切刀头旋转,由于蜗杆上的左蜗杆牙与右蜗杆牙的旋向相反设置,这样蜗杆转动时,可以使得左蜗轮与右蜗杆牙相向旋转或相反旋转,当左蜗轮与右蜗杆牙相向旋转时,则可以使得左剪切刀头与右剪切刀头相向旋转靠近,进而可以实现对树枝进行剪切即可;最终,避免以往还需要手动剪枝操作的麻烦,减少了劳动时间以及劳力的消耗,提高了剪枝的效率;
13.2、本实用新型中,将长杆的顶端插接到手持管内,然后通过锁紧螺栓对长杆进行锁紧固定,随后再通过第二无线遥控开关控制步进电机的工作来进行剪枝即可,这样避免以往对较高的树进行剪枝时由于剪枝工具的手柄较短而需要利用梯架登高后才能进行剪枝的弊端,省时省力,且结构简单,便于人们操作使用;
14.综上所述,本实用新型中,通过机械化操作来使得左剪切刀头与右剪切刀头相向旋转靠近,进而可以对树枝进行剪切,避免了以往还需要手动剪枝操作的麻烦,减少了劳动时间以及劳力的消耗,提高了剪枝的效率;并且通过加装长杆,还可以对较高的树枝进行修剪时,避免以往对较高的树进行剪枝时由于剪枝工具的手柄较短而需要利用梯架登高后才能进行剪枝的弊端,且结构简单,便于人们操作使用。
附图说明
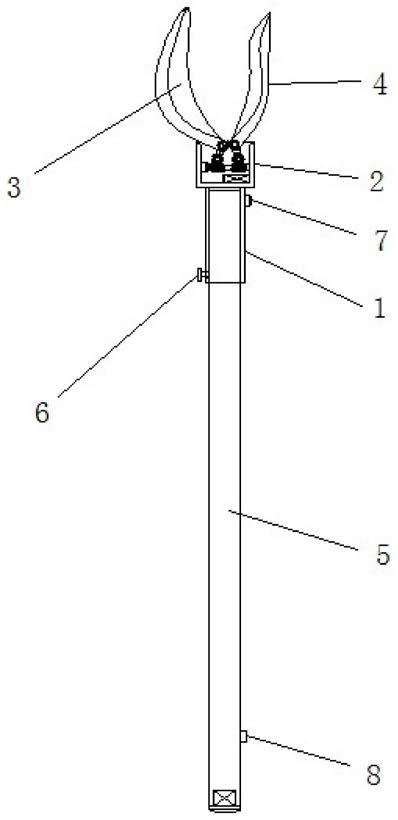
15.图1为本实用新型提出的一种园林施工用剪枝装置在加装长杆后的状态示意图;
16.图2为本实用新型没有加装长杆时的状态结构示意图;
17.图3为本实用新型图2中a部分的结构示意图。
18.图中:手持管1、壳体2、左剪切刀头3、左转轴31、左蜗杆牙32、左蜗轮33、左传动轴34、左传动轮35、左链条36、左从动轮37、右剪切刀头4、右转轴41、右蜗杆牙42、右蜗轮43、右传动轴44、右传动轮45、右链条46、右从动轮47、长杆5、锁紧螺栓6、第一无线遥控开关7、第二无线遥控开关8、第一电源9、步进电机10、蜗杆11。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1
‑
3,一种园林施工用剪枝装置,包括壳体2,所述壳体2的底部固定焊接有手持管1,壳体2的顶部为开口设置,且壳体2顶部开口的左侧转动安装有左剪切刀头3,壳体2顶部开口的右侧转动安装有右剪切刀头4,壳体2的顶部开口内转动安装有左转轴31和位于左转轴31右侧的右转轴41,且左剪切刀头3的底端固定套接在左转轴31上,左转轴31上还固定套接有左从动轮37,左从动轮37的下侧通过左链条36传动连接有左传动轮35,左传动轮35上固定套接有左传动轴34,且左传动轴34转动安装在壳体2内,左传动轴34上还固定套
接有左蜗轮33,左蜗轮33的下方转动设置有蜗杆11,壳体2的左侧内壁上固定安装有步进电机10,且步进电机10的输出端与蜗杆11的左端固定连接,所述蜗杆的圆周上固定设置有左蜗杆牙32和位于左蜗杆牙32右侧的右蜗杆牙42,且左蜗杆牙32与左蜗轮33相啮合;右蜗杆牙42上啮合有右蜗轮43,右蜗轮43上固定套接有右传动轴44,且右传动轴44转动安装于壳体2内,右传动轴44上还固定套接有右传动轮45,右传动轮45上通过右链条46传动连接有右从动轮47,且右从动轮47固定套接在右转轴41上。本实用新型中,通过机械化操作来使得左剪切刀头3与右剪切刀头4相向旋转靠近,进而可以对树枝进行剪切,避免了以往还需要手动剪枝操作的麻烦,减少了劳动时间以及劳力的消耗,提高了剪枝的效率;并且通过加装长杆5,还可以对较高的树枝进行修剪时,避免以往对较高的树进行剪枝时由于剪枝工具的手柄较短而需要利用梯架登高后才能进行剪枝的弊端,且结构简单,便于人们操作使用。
21.在本实例中,所述手持管1的内部活动套接有长杆5,且长杆5的底端延伸至手持管1的下方,手持管1的左侧还通过螺纹安装有用于对长杆5进行锁紧固定的锁紧螺栓6。
22.在本实例中,所述手持管1的右侧设置有第一无线遥控开关7,长杆5的右侧底部设置有第二无线遥控开关8,壳体2内设置有用于整个装置供电的第一电源9,长杆5的底端还设有用于第二无线遥控开关8供电的第二电源,所述第一无线遥控开关7和第二无线遥控开关8分别与步进电机10电性控制连接。
23.在本实例中,所述蜗杆11上的左蜗杆牙32与右蜗杆牙42的旋向相反设置。
24.在本实例中,所述壳体2的右侧内壁上设置有转动座,且蜗杆11的右端转动安装在转动座上。
25.在本实例中,所述步进电机10的输出端固定设置有联轴器,且步进电机10的输出端通过联轴器与蜗杆11的左端连接固定。
26.工作原理:在对园林中的树枝进行剪枝时,若树枝较矮时,则可通过第一无线遥控开关7控制步进电机10带动蜗杆11转动,蜗杆11转动时通过左蜗杆牙32与左蜗轮33进行啮合传动,进而带动左传动轴34以及左传动轮35旋转,左传动轮35又通过左链条36带动左从动轮37以及左转轴31旋转,左转轴31又带动左剪切刀头3旋转;与此同时,蜗杆11转动时还通过右蜗杆牙42与右蜗轮43啮合传动配合,来带动右传动轴44以及右传动轮45旋转,右传动轮45旋转又通过右链条46带动右从动轮47以及右转轴41旋转,右转轴41旋转时又带动右剪切刀头4旋转,由于蜗杆11上的左蜗杆牙32与右蜗杆牙42的旋向相反设置,这样蜗杆11转动时,可以使得左蜗轮33与右蜗杆牙42相向旋转或相反旋转,当左蜗轮33与右蜗杆牙42相向旋转时,则可以使得左剪切刀头3与右剪切刀头4相向旋转靠近,进而可以实现对树枝进行剪切即可;最终,避免以往还需要手动剪枝操作的麻烦,减少了劳动时间以及劳力的消耗,提高了剪枝的效率;
27.另外,当需要对较高的树枝进行修剪时,则可以将长杆5的顶端插接到手持管1内,然后通过锁紧螺栓6对长杆5进行锁紧固定,随后再通过第二无线遥控开关8控制步进电机10的工作来进行剪枝即可,这样避免以往对较高的树进行剪枝时由于剪枝工具的手柄较短而需要利用梯架登高后才能进行剪枝的弊端,且结构简单,便于人们操作使用。
28.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范
围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。