1.本实用新型涉及一种激光扫描显微测量装置。
背景技术:
2.专著handbook of image and video processing(second edition)第10章第9节confocal microscope第1293页、《激光扫描共聚焦显微镜技术》第4页、《激光扫描共聚焦显微术》第2页都公开了激光扫描共聚焦显微镜光路图;《激光扫描共聚焦显微镜技术》第4页总结所述,“近几十年来,光学显微镜的光学部件改变不大”;《激光扫描共聚焦显微术》第1章第5节各公司仪器性能简介,激光扫描共聚焦显微镜的光学部件都包括光电倍增管和检测针孔、激光器和光源针孔。为了提高纵向分辨率,检测针孔小,易引起衍射,样品的不同物点在光电倍增管检测面的像点有偏差,但检测针孔位置固定,因此轴上的物点与旁轴的物点存在偏差。
3.本技术采用近年来快速发展的高帧率面阵相机,结合高增益的微通道板成像探测器构成检测模组,替代高灵敏度、响应时间快的光电倍增管;并用面阵相机的单个或多个ccd元件作为虚拟针孔,替代探测针孔,比如用每帧图像上的光强最大的ccd元件的光强,替代针孔后的光电倍增管探测的光强,避免了旁轴和轴上点的偏差,取消探测针孔后衍射得以避免。光源针孔后光斑小,能量利用率低,光源针孔小易引起衍射;采用扩束镜替代掉光源针孔,没有光源针孔衍射得以避免,且激光器能量利用率高,缩小物镜后聚焦的光斑尺寸,提高横向精度,高斯光聚焦后的最高精度0.64λ/na,优于普通光学显微镜精度1.22λ/na。改进后的光源的精度与文献(handbook of image and video processing第10章第9节confocal microscope第1293页)中的激光扫描共聚焦横向分辨率0.56λ/na相当。
技术实现要素:
4.本实用新型的目的是克服现有技术存在的不足,提供一种激光扫描显微测量装置。
5.本实用新型的目的通过以下技术方案来实现:
6.激光扫描显微测量装置,特点是:包含激光器、半反半透镜、振镜、扫描物镜、三维位移台和检测模组,激光器的输出光路上布置半反半透镜,半反半透镜的反射光路上依次布置振镜和扫描物镜,透射光路上布置检测模组;激光器发出激光,经过半反半透镜入射到振镜中,振镜控制激光二维偏转,经过扫描物镜后,聚焦于三维位移台上的样品上,激光入射到样品后发生反射,返回扫描物镜和振镜,再经过半反半透镜后进入检测模组。
7.进一步地,上述的激光扫描显微测量装置,其中,三维位移台包含用于x轴与y轴二维移动的二维位移台以及连接于其上用于z轴上下移动的压电陶瓷z轴单元;压电陶瓷z轴单元沿z轴移动样品,在每个z坐标下,振镜控制激光扫描样品的x
‑
y面,由检测模组获取不同x
‑
y
‑
z坐标下的图像,以单个或多个ccd元件作为虚拟针孔,获取每幅图像中光强最大的虚拟针孔区域的光强,获得不同x
‑
y
‑
z坐标下的光强值,得到任意x
‑
y坐标下最大光强对应
的z坐标,即得到x
‑
y平面的深度分布,测量出划痕、粗糙度的表面形貌信息。
8.进一步地,上述的激光扫描显微测量装置,其中,所述激光器安装于激光器安装架上,激光器安装架固定于竖向螺杆上,竖向螺杆上安装在第一转接板上,扩束镜通过转接环安装于第一转接板上,竖向螺杆固定在第二转接板上,第二转接板固定在笼式正交转向板上,笼式正交转向板安装在横向螺杆上,半反半透镜安装在横向螺杆上,横向螺杆的一端与振镜相旋接,扫描物镜与振镜相旋接,横向螺杆的另一端安装第三转接板,检测模组固定在第三转接板上。
9.进一步地,上述的激光扫描显微测量装置,其中,所述检测模组包含依次设置的用于激光放大的微通道板成像探测器、用于将微通道板成像探测器放大的信号无偏移传送给高帧率面阵相机的光纤光学板以及高帧率面阵相机。
10.进一步地,上述的激光扫描显微测量装置,其中,高帧率面阵相机固定在相机架上,相机架通过螺杆固定在笼板转接件上,笼板转接件设有用于容纳光纤光学板、微通道板成像探测器、第一卡环、保护镜片、第二卡环的腔室,光纤光学板位于高帧率面阵相机与微通道板成像探测器之间并紧靠,微通道板成像探测器由第一卡环固定,第一卡环前放置有保护镜片,保护镜片由第二卡环固定。
11.进一步地,上述的激光扫描显微测量装置,其中,高帧率面阵相机为mhz帧率的面阵相机,微通道板成像探测器为信号放大106~107倍的微通道板成像探测器。
12.进一步地,上述的激光扫描显微测量装置,其中,激光器为可输出高斯分布、350~650nm波长的激光器。
13.进一步地,上述的激光扫描显微测量装置,其中,激光器的输出光路上布置扩束镜。
14.本实用新型与现有技术相比具有显著的优点和有益效果,具体体现在以下方面:
15.①
本实用新型采用面阵相机的单个或多个ccd元件点作为虚拟针孔,避免针孔边沿衍射引起的误差。
16.②
采用扫描振镜,避免平台移动时样品晃动引起的测量误差;采用高帧率的面阵相机结合微通道板成像探测器构成检测模组,改善振镜扫描时的测量精度;采用每帧图像上的光强最大的单个或者多个ccd元件的光强,作为对应物点对应的光强;单个或者多个ccd元件构成的虚拟针孔,随着物点的位置的变化而变化,带虚拟针孔的探测器测量到的光强始终是高斯光束的束腰中心区域光强;
17.③
本实用新型采用扩束镜替代掉光源针孔,没有光源针孔衍射得以避免,且激光器能量利用率高。
18.④
光源针孔小,针孔后的光近似均匀分布,不同纵向位置下,探测模组前的光斑尺寸变化但光强均匀,探测针孔后的相对光强等于探测针孔面积与光斑面积的比例;高斯分布的激光,不同纵向位置下,探测模组前的光斑尺寸变化且光强在光斑中心强边缘弱,虚拟探测针孔后的相对光强等于针孔面积内的光强积分除以光斑面积内的光强积分;相同针孔面积下,虚拟探测针孔后的光强比大于实际针孔后的光强比,因此虚拟针孔探测模组的信号强度和信噪比更高。
19.⑤
微通道板成像探测器、光纤光学板和高帧率面阵相机构成检测模组,不仅可以替代针孔和光电倍增管,而且成本更低、稳定性更好;微通道板成像探测器将光信号转化为
电信号,电子在荧光屏上成像,光纤光学板将荧光屏上的成像传递到相机上;光纤光学板传递的像畸变小且无渐晕。
20.本实用新型的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型具体实施方式了解。本实用新型的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
附图说明
21.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
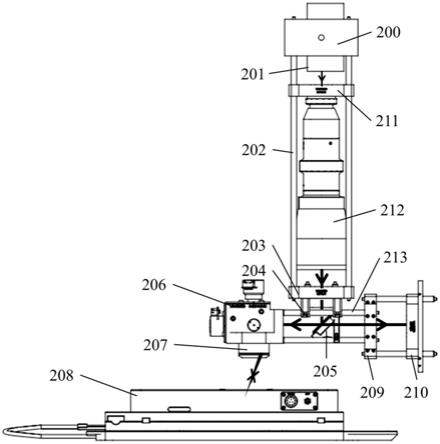
22.图1:本实用新型装置的结构示意图;
23.图2a:检测模组的结构示意图;
24.图2b:图2a的a
‑
a剖视示意图;
25.图3:本实用新型测量有划痕的玻璃的表面形貌照片;
26.图4:不同虚拟针孔尺寸下,归一化激光功率与相对轴向位置(轴向位置除以瑞利距离z0)的关系图,其中:a
‑
虚拟针孔尺寸等于束腰直径乘以放大率,b
‑
虚拟针孔尺寸等于束腰直径;
27.图5:不同焦距的扫描透镜下,归一化激光功率与轴向位置的关系图。
具体实施方式
28.下面将结合本实用新型实施例中附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本实用新型的描述中,方位术语和次序术语等仅用于区分描述,而不能理解为指示或暗示相对重要性。
30.本实用新型采用高帧率面阵相机,结合高增益的微通道板成像探测器以及光纤光学板构成检测模组,并用面阵相机的单个或多个ccd元件作为虚拟针孔,比如用每帧图像上的光强最大的ccd元件的光强,避免旁轴和轴上点的偏差,取消探测针孔后衍射得以避免。光源针孔后光斑小,能量利用率低,光源针孔小易引起衍射;采用扩束镜,没有光源针孔衍射得以避免,且激光器能量利用率高,缩小物镜后聚焦的光斑尺寸,提高横向精度,高斯光聚焦后的最高精度0.64λ/na,显著优于普通光学显微镜精度1.22λ/na。
31.如图1所示,激光扫描显微测量装置,其特征在于:包含激光器201、半反半透镜
205、振镜206、扫描物镜207、三维位移台208和检测模组210,激光器201为可输出高斯分布、350~650nm波长的激光器,激光器201的输出光路上依次布置扩束镜212、半反半透镜205,半反半透镜205的反射光路上依次布置振镜206和扫描物镜207,透射光路上布置检测模组210。
32.三维位移台208包含用于x轴与y轴二维移动的二维位移台以及连接于其上用于z轴上下移动的压电陶瓷z轴单元;压电陶瓷z轴单元沿z轴移动样品,在每个z坐标下,振镜206控制激光扫描样品的x
‑
y面,由检测模组210获取不同x
‑
y
‑
z坐标下的图像,以单个或多个ccd元件作为虚拟针孔,获取每幅图像中光强最大的虚拟针孔区域的光强,获得不同x
‑
y
‑
z坐标下的光强值,得到任意x
‑
y坐标下最大光强对应的z坐标,即得到x
‑
y平面的深度分布,测量出划痕、粗糙度的表面形貌信息。
33.激光器201安装于激光器安装架200上,激光器安装架200固定于竖向螺杆202上,竖向螺杆202上安装在第一转接板211上,扩束镜212通过转接环安装于第一转接板211上,竖向螺杆202固定在第二转接板203上,第二转接板203固定在笼式正交转向板204上,笼式正交转向板204安装在横向螺杆213上,半反半透镜205安装在横向螺杆213上,横向螺杆213的一端与振镜206相旋接,扫描物镜207与振镜206相旋接,横向螺杆213的另一端安装第三转接板209,检测模组210固定在第三转接板209上。
34.如图2a、2b所示,检测模组210包含依次设置的用于激光放大的微通道板成像探测器311、用于将微通道板成像探测器放大的信号无偏移传送给高帧率面阵相机的光纤光学板312以及高帧率面阵相机301,高帧率面阵相机301为mhz帧率的面阵相机,微通道板成像探测器311为信号放大106~107倍的微通道板成像探测器;高帧率面阵相机301通过螺纹孔一310和螺纹孔二314上的螺钉固定在相机架303上,相机架303通过螺杆一305、螺杆二306、螺杆三307固定在笼板转接件302上,笼板转接件302设有用于容纳光纤光学板312、微通道板成像探测器311、第一卡环308、保护镜片309、第二卡环304的腔室,零工作距离的光纤光学板312紧靠着高帧率面阵相机301和微通道板成像探测器311,微通道板成像探测器311由第一卡环308固定,第一卡环308前放置保护镜片309,保护镜片309前由第二卡环304固定。
35.激光器201发出激光,经过半反半透镜205入射到振镜206中,振镜206控制激光二维偏转,经过扫描物镜207后,聚焦于三维位移台208上的样品上,激光入射到样品后发生反射,原路返回扫描物镜207和振镜206,再经过半反半透镜205后进入检测模组210;测量得到划痕的3d形貌,测得划痕区域及周边的粗糙度,区域各点的最大高度值r
p
,区域各点的最小高度值r
v
,划痕峰谷值等于r
p
‑
r
v
;
36.沿z轴移动样品,在每个z坐标下,振镜206控制激光扫描样品的x
‑
y面,由检测模组210获取不同x
‑
y
‑
z坐标下的图像,以单个或多个ccd元件作为虚拟针孔,获取每幅图像中光强最大的虚拟针孔区域的光强,获得不同x
‑
y
‑
z坐标下的光强值,得到任意x
‑
y坐标下最大光强对应的z坐标,即得到x
‑
y平面的深度分布,测量出划痕、粗糙度的表面形貌信息;
37.激光器201输出高斯分布的激光,经过振镜206和扫描物镜207后的束腰半径w0表示为:
[0038][0039]
式中λ和w1分别表示波长和扫描物镜前的入射光斑尺寸;瑞利距离z0=πw
02
/λ;距
离z处的腰斑半径w
z
表示如下:
[0040][0041]
式中z=
‑
z
c
表示束腰的坐标位置,坐标z轴沿着激光传播方向,束腰处光斑尺寸w
z
最小;扫描物镜的焦距为f,采用200mm的像距,像距远大于f,利用高斯成像公式,物距约等于f;物镜的放大倍数为m
a
=200/f,检测模组210的高帧率面阵相机上的光斑尺寸近似为m
a
w
z
;
[0042]
高帧率面阵相机ccd元件尺寸为s,x和y表示相机面上的坐标;只移动z轴,像方测到的功率与物方激光功率成正比,像方总功率为p0;当物方坐标为z时,峰值光强为i
z
,入射到相机上的光斑中心的功率p
s
(z)表示为:
[0043][0044]
当虚拟针孔尺寸s足够大时,相机上探测到的功率p
s
(z)始终等于像方总功率p0,与坐标z无关;当采用单个或多个相机ccd元件时,p
s
(z)随z轴变化,当束腰处于样品表面时,w
z
最小,p
s
(z)最大,探测出该点的高度信息;探测到的功率比p
s
(z)/p0随着虚拟针孔尺寸s的减小而减小,虚拟针孔尺寸s等于束腰直径w
z
乘以放大率m
a
时,针孔后功率等于总功率的98.2%;虚拟针孔尺寸下降到束腰直径w
z
时,功率比p
s
(z)/p0下降,功率比p
s
(z)/p0随着放大率的增大而降低;当放大率m
a
等于10时,功率比p
s
(z)/p0下降到3.92%;当放大率等于20时,功率比p
s
(z)/p0下降到0.995%。
[0045]
激光扫描显微测量
[0046]
实施例1
[0047]
最大功率为200mw的405nm激光器201(长春新产业光电技术有限公司,型号mdl
‑
xs
‑
405)发出1.2mm直径激光,经过2~5倍可变倍率的扩束镜212(索雷博,型号be
‑
02
‑
05
‑
a)后光斑尺寸扩大,经过半反半透镜205反射到振镜206中,振镜206控制激光二维偏转,采用带传感测量的振镜,允许振镜反射镜闭环工作且能够输出振镜坐标。经过扫描物镜207后,聚焦在三维位移台208上的样品上,三维位移台由二维位移台和压电陶瓷z轴单元构成,二维位移台(索雷博,型号mls203
‑
1)实现x轴与y轴的二维移动,压电陶瓷z轴单元(索雷博,型号mzs500
‑
e)实现z轴上下移动,最大行程500μm,分辨率25nm;激光入射到样品后发生反射,返回扫描物镜207和振镜206,透射过半反半透镜205后进入检测模组210。
[0048]
像方激光经过微通道板成像探测器311(dmphotonics,型号微通道板
‑
ifp 25/2)放大,光纤光学板312(szphoton,型号fop
‑
dsp)将微通道板成像探测器放大的信号无偏移地传递给高帧率面阵相机301(型号isis,参考文献a 16 mfps 165 kpixel backside
‑
illuminated ccd,evolution of high
‑
speed image sensors,a backside
‑
illuminated image sensor with 200,000pixels operating at 250,000 frames per second和an image sensor which captures 100 consecutive frames at 1000000 frames_s),高帧
率相机isis指标汇总如下:
[0049]
灰度范围,10bit;
[0050]
波长范围,350
‑
650nm;
[0051]
ccd元件尺寸3.0
×
3.6μm;
[0052]
感光芯片尺寸,15.6mm
×
19.7mm,感光芯片用陶瓷封装在部件301里;
[0053]
帧率,最高可达16mhz。
[0054]
激光扫描显微测量,二维振镜测试样品三维形貌等信息,入射光斑小于扫描透镜入瞳直径,比如入射光斑用到入瞳直径的一半,允许入射光倾斜一半。振镜转速快,且避免了平台移动过程中样品晃动引起的测量误差。平台惯性大,加减速时间约为100ms,振镜轻加减速时间短,扫描延迟通常小于1ms,采用振镜扫描方式,减少加减速时间。
[0055]
实施例2:激光扫描显微测量划痕峰谷值。
[0056]
压电陶瓷移动z轴位移20μm,步长0.25μm。每个z轴坐标下,采用焦距为4mm的扫描物镜扫描玻璃样品表面,单次扫描幅面282.6μm
×
210μm,x
‑
y两个方向的扫描角度分别为4.0
°
和3.0
°
。测量划痕表面形貌照片如图3所示,该区域各点的最大高度值rp为2.65μm,该区域个点的最小高度值rv为
‑
2.72μm,划痕峰谷值等于rp
‑
rv=5.4μm。
[0057]
实施例3
[0058]
不同虚拟针孔尺寸下,根据p
s
(z)公式获得归一化功率与轴向位置的关系如图4所示。曲线a和曲线b对应的虚拟针孔尺寸分别为扫描物镜放大倍数乘以束腰尺寸、束腰尺寸,曲线a的半高宽大于曲线b,因此虚拟针孔尺寸越小,纵向z轴精度越高。但尺寸越小,强度越低,要求探测模组的放大倍率高、灵敏度足够。提高纵向精度,除了减小虚拟针孔尺寸,还可以通过减小扫描物镜焦距来实现。
[0059]
实施例4
[0060]
不同焦距扫描物镜下,根据p
s
(z)公式获得归一化功率与轴向位置的关系如图5所示。振镜固定在一个x
‑
y坐标点,通过压电陶瓷移动样品,测量不同z坐标下的虚拟针孔后的激光功率。激光器出射1.2mm光斑,经过3倍扩束镜后光斑尺寸变为3.6mm。扫描物镜倍数从50倍增大到100倍,焦距从4mm降低至2mm,半高宽从1.3μm降低到0.31μm。灰度10bit的面阵相机,分辨率为1/1024=0.098%。50倍物镜,虚拟针孔尺寸等于单个ccd元件尺寸3.0μm
×
3.6μm时,当位置变化93nm,归一化功率下降到98.0%,2.0%的差别能够被面阵相机测试出来,因此纵向精度可以达到93nm。100倍物镜,虚拟针孔尺寸等于单个ccd元件尺寸3.0μm
×
3.6μm时,当位置变化23nm,归一化功率下降到98.0%,因此纵向精度可以达到23nm。
[0061]
本实用新型采用面阵相机的单个或多个ccd元件点作为虚拟针孔,避免针孔边沿衍射引起的误差。
[0062]
采用扫描振镜,避免平台移动时样品晃动引起的测量误差;采用高帧率的面阵相机结合微通道板成像探测器构成检测模组,改善振镜扫描时的测量精度。采用每帧图像上的光强最大的单个或者多个ccd元件的光强,作为对应物点对应的光强;单个或者多个ccd元件构成的虚拟针孔,随着物点的位置的变化而变化,带虚拟针孔的探测器测量到的光强始终是高斯光束的束腰中心区域光强。
[0063]
本实用新型采用扩束镜替代掉光源针孔,没有光源针孔衍射得以避免,且激光器能量利用率高。
[0064]
光源针孔小,针孔后的光近似均匀分布,不同纵向位置下,探测模组前的光斑尺寸变化但光强均匀,探测针孔后的相对光强等于探测针孔面积与光斑面积的比例;高斯分布的激光,不同纵向位置下,探测模组前的光斑尺寸变化且光强在光斑中心强边缘弱,虚拟探测针孔后的相对光强等于针孔面积内的光强积分除以光斑面积内的光强积分;相同针孔面积下,虚拟探测针孔后的光强比大于实际针孔后的光强比,因此虚拟针孔探测模组的信号强度和信噪比更高。
[0065]
微通道板成像探测器、光纤光学板和高帧率面阵相机构成检测模组,不仅可以替代针孔和光电倍增管,而且成本更低、稳定性更好;微通道板成像探测器将光信号转化为电信号,电子在荧光屏上成像,光纤光学板将荧光屏上的成像传递到相机上;光纤光学板传递的像畸变小且无渐晕;相比于透镜,光纤光学板传递的像整体偏移小;光纤光学板已应用于手机的光学指纹模组中,将指纹图像准确无误地传递给cmos或ccd相机,因此光纤光学板成本低。
[0066]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0067]
上述仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求所述的保护范围为准。
[0068]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。