1.本公开涉及一种用于使用太赫兹(thz)辐射来确定布置在主体上的多个层的层厚度的装置。
2.本公开还涉及一种使用太赫兹(thz)辐射来确定布置在主体上的多个层的层厚度的装置的操作方法。
背景技术:
3.de 10 2016 118 905 a1公开了一种用于测量thz辐射的装置,包括距离测量系统。
技术实现要素:
4.优选实施例涉及一种用于确定布置在主体上的多个层的层厚度的装置,其中,所述装置包括太赫兹(thz)发射器和thz接收器,所述thz发射器被配置为向所述多个层发射thz信号,所述thz接收器被配置为接收所述thz信号的已由所述多个层中的至少一层反射的反射部分,其中,所述装置被配置为基于所述thz信号的所述反射部分确定所述多个层中的至少一层的层厚度,其中,所述装置还包括距离测量设备,距离测量设备用于确定表征所述设备和所述主体之间的距离的至少一个参数,其中,所述距离测量设备包括至少一个光学三角测量传感器。该光学三角测量传感器可实现高效但却精确的距离测量,并且也适用于工业生产线等相对恶劣的环境中。
5.根据另一优选实施例,所述距离测量设备被配置为确定所述装置与所述主体之间的所述距离和/或所述装置与所述主体之间的所述距离的变化。
6.根据另一优选的实施例,所述距离测量设备被配置为以至少1千赫兹(khz)、优选地至少10khz、更优选地至少20khz的预定采样率来确定所述距离和/或所述距离的所述变化。
7.根据另一优选的实施例,所述距离测量设备包括两个或更多个光学三角测量传感器。
8.根据另一优选的实施例,所述thz辐射包括在0.3thz和100thz的范围内、优选地在0.5thz和10thz的范围内的至少一个频率分量。
9.根据另一优选实施例,所述至少一个光学三角测量传感器包括一个光源和一个光检测器,光源用于利用光学测量辐射照射所述主体的表面区域,其中,光学测量辐射特别地包括激光辐射,并且光检测器用于接收所述光学测量辐射的已由所述表面区域反射的相应反射部分。
10.根据另一优选的实施例,所述至少一个光学三角测量传感器包括一个光源和至少两个光检测器,光源用于利用光学测量辐射照射所述主体的表面区域,其中,所述光学测量辐射特别地包括激光辐射,至少两个光检测器用于接收所述光学测量辐射的已由所述表面区域反射的相应反射部分。
11.根据另一优选的实施例,所述至少一个光学三角测量传感器包括用于利用第一光学测量辐射照射所述主体的表面区域的第一光源和用于利用第二光学测量照射所述主体的所述表面区域的第二光源,其中,所述第一光学测量辐射和/或所述第二光学测量辐射特别地包括激光辐射,其中,所述至少一个光学三角测量传感器还包括至少一个光检测器,所述至少一个光检测器用于接收所述第一光学测量辐射和/或所述第二光学测量辐射的已由所述表面区域反射的反射部分。
12.根据另一优选的实施例,所述至少一个光学三角测量传感器相对于所述装置的光轴布置为,使得所述至少一个光学三角测量传感器能够:至少检测a)由所述至少一个光学三角测量传感器的至少一个光源发射并由所述主体的表面区域反射的光学测量辐射的漫反射,优选仅检测光学测量辐射的漫反射,和/或至少检测b)由所述至少一个光学三角传感器的至少一个光源发射并由所述主体的所述表面区域反射的光学测量辐射的直接反射,优选仅检测光学测量辐射的直接反射。
13.根据另一优选的实施例,所述至少一个光学三角测量传感器相对于所述装置的光轴配置和布置为,使得所述至少一个光学三角测量传感器能够:选择性地检测a)由所述至少一个光学三角测量传感器的至少一个光源发射并由所述主体的表面区域反射的光学测量辐射的漫反射,由此限定第一三角测量路径,和/或选择性地检测b)由所述至少一个光学三角测量传感器的至少一个光源发射并由所述主体的表面区域或所述表面区域反射的光学测量辐射的直接反射,由此限定第二三角测量路径。
14.根据另一优选实施例,所述设备被配置为:确定所述第一三角测量路径和所述第二三角测量路径的质量度量,以及根据所述质量度量选择所述第一三角测量路径和所述第二三角测量路径中的一个,其中,所述质量度量表征与所述第一三角测量路径和所述第二三角测量路径中的相应一个相关联的多个距离测量的方差和/或噪声。根据另一优选实施例,所述装置被配置为针对所述两条三角测量路径确定相对于表面法线的方向余弦。根据另一优选实施例,在有限时间内所述两条三角测量路径的优选地同步测量的标准偏差可以用作所述信号质量度量。
15.根据另一优选实施例,所述装置包括激光源、分束器和光学延迟台(optical delay stage),其中,所述thz发射器包括thz源,其中,所述thz接收器包括thz检测器,其中,所述激光源被配置为向所述分束器提供激光信号,其中,所述分束器被配置为:a)将所述激光信号分成第一信号和第二信号;b)向所述thz发射器的所述thz源提供所述第一信号;c)向所述光学延迟台提供所述第二信号,其中,所述光学延迟台被配置为对所述第二信号应用预定的时变延迟、优选周期性的延迟,其中,获得延迟信号,并向所述thz接收器的所述thz检测器提供所述延迟信号。
16.根据另一优选实施例,所述装置被配置为确定延迟参数,在将由所述光学延迟台提供的预定的时变延迟、优选周期性的延迟以及所述装置与所述主体之间的所述距离的变化考虑在内的条件下,所述延迟参数表征所述延迟信号的有效延迟,其中,优选地,所述装置被配置为根据所述延迟参数确定所述层厚度。作为示例,根据另一优选实施例,可以确定表征通过所述thz检测器接收的信号的时间相关信号。基于该时间相关信号,可以确定布置在主体上的多个层的层厚度。为了在相应的thz测量期间补偿(不期望的)距离变化,可以使用延迟参数,例如用于校正和/或“细化”所述时间相关信号,从而消除(不期望的)距离变化
的影响。这样,可以实现更精确的层厚度测量。换句话说,根据另一优选实施例,层厚度不是直接取决于所述延迟参数而确定的,而是所述延迟参数可用于补偿所述时间相关信号(和/或其时间轴)中的误差,其在根据所述(补偿的)时间相关信号确定所述层厚度时提高精度。
17.另一优选实施例涉及一种用于确定布置在主体上的多个层的层厚度的装置的操作方法,其中所述装置包括thz发射器和thz接收器,所述thz发射器被配置为向所述多个层发射thz信号,所述thz接收器被配置为接收所述thz信号的已由所述多个层中的至少一层反射的反射部分,其中,所述装置被配置为基于所述thz信号的所述反射部分确定所述多个层中的至少一层的层厚度,其中,所述装置还包括距离测量设备,所述距离测量设备用于确定表征所述装置和所述主体之间的距离的至少一个参数,其中,所述距离测量设备包括至少一个光学三角测量传感器,其中,所述方法包括:确定表征所述装置和所述主体之间的所述距离的所述至少一个参数,根据所述至少一个参数确定所述多个层中的至少一层的所述层厚度。
18.根据另一优选实施例,所述测量设备包括两个或更多个光学三角测量传感器,其中,优选地,所述两个或更多个光学三角测量传感器被选择性地和/或同时使用。
19.根据另一优选的实施例,所述至少一个光学三角测量传感器包括一个光源和至少两个光检测器,所述一个光源用于利用光学测量辐射照射所述主体的表面区域,其中,所述光学测量辐射特别地包括激光辐射,所述至少两个光检测器用于接收所述光学测量辐射的已由所述表面区域反射的相应反射部分,其中,所述方法还包括:选择所述至少两个光检测器中的一个或多个用于执行距离测量。
20.根据另一优选的实施例,所述至少一个光学三角测量传感器包括用于利用第一光学测量辐射照射所述主体的表面区域的第一光源和用于利用第二光学测量照射所述主体的所述表面区域的第二光源,其中,所述第一光学测量辐射和/或所述第二光学测量辐射特别地包括激光辐射,其中,所述至少一个光学三角测量传感器还包括至少一个光检测器,所述至少一个光检测器用于接收所述第一光学测量辐射和/或所述第二光学测量辐射的已由所述表面区域反射的反射部分,其中,所述方法还包括:选择所述至少两个光源中的一个或多个用于执行距离测量。
21.根据另一优选的实施例,所述至少一个光学三角测量传感器相对于所述装置的光轴配置和布置为,使得所述至少一个光学三角测量传感器能够:选择性地检测a)由所述至少一个光学三角测量传感器的至少一个光源发射并由所述主体的表面区域反射的光学测量辐射的漫反射,由此限定第一三角测量路径,和/或选择性地检测b)由所述至少一个光学三角测量传感器的至少一个光源发射并由所述主体的表面区域或所述表面区域反射的光学测量辐射的直接反射,由此限定第二三角测量路径,其中,所述方法还包括:选择性地使用第一三角测量路径或第二三角测量路径或者使用第一三角测量路径和第二三角测量路径,其中,优选地,所述装置确定所述第一三角测量路径和所述第二三角测量路径的质量度量,并根据所述质量度量选择所述第一三角测量路径和所述第二三角测量路径中的一个,其中,优选地,所述质量度量表征与所述第一三角测量路径和所述第二三角测量路径中的相应一个相关联的多个距离测量的方差和/或噪声。
22.根据另一优选实施例,所述装置包括激光源、分束器和光学延迟台,其中,所述thz发射器包括thz源,其中,所述thz接收器包括thz检测器,其中,所述激光源向所述分束器提
供激光信号,其中,所述分束器:a)将所述激光信号分成第一信号和第二信号;b)向所述thz发射器的所述thz源提供所述第一信号;c)向所述光学延迟台提供所述第二信号,其中,所述光学延迟台对所述第二信号应用预定的时变延迟、优选周期性的延迟,其中,获得延迟信号,并向所述thz接收器的所述thz检测器提供所述延迟信号。
23.根据另一优选实施例,所述设备确定延迟参数,在将由所述光学延迟台提供的预定的时变延迟、优选周期性的延迟以及所述装置与所述主体之间的所述距离的变化考虑在内的条件下,所述延迟参数表征所述延迟信号的有效延迟,其中,优选地,所述装置根据所述延迟参数确定所述层厚度。
24.另一优选的实施例涉及根据实施例的装置和/或根据实施例的方法用于确定布置在主体的表面上的多个层的层厚度的用途,其中,优选地,所述主体和/或所述主体的所述表面是导电的,其中,优选地,所述多个层的顶层包括透明涂层,并且其中,优选地,与所述顶层相邻的第二层包括底涂层。根据另一优选的实施例,所述主体的所述表面不导电。
附图说明
25.实施例的其他特征、方面和优点在参考附图的以下详细描述中给出,其中:
26.图1示意性地描绘了根据优选实施例的装置的简化框图,
27.图2示意性地描绘了根据另一优选实施例的布置在主体上的多个层的简化侧视图,
28.图3示意性地描绘了根据另一优选实施例的装置的简化框图,
29.图4a示意性地描绘了根据另一优选实施例的方法的简化流程图,
30.图4b示意性地描绘了根据另一优选实施例的方法的简化流程图,
31.图4c示意性地描绘了根据另一优选实施例的方法的简化流程图,
32.图5a示意性地描绘了根据另一优选实施例的传感器的简化侧视图,
33.图5b示意性地描绘了根据另一优选实施例的传感器的简化侧视图,
34.图6示意性地描绘了根据另一优选实施例的传感器的简化侧视图,
35.图7示意性地描绘了根据另一优选实施例的传感器的简化侧视图,
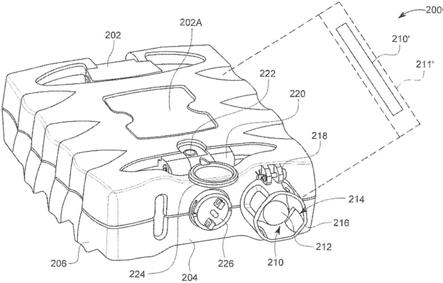
36.图8示意性地描绘了根据另一优选实施例的配置,
37.图9a至图9j分别示意性地描绘了根据另一优选实施例的操作参数,
38.图10示意性地描绘了根据另一优选实施例的装置的简化框图,以及
39.图11示意性地描绘了根据另一优选实施例的控制设备的简化框图。
具体实施例
40.图1示意性地描绘了根据优选实施例的装置100的简化框图。装置100被配置为确定布置在主体上的多个层的层厚度,例如基材上的多个聚合物涂层,例如漆层。
41.图2示意性地描绘了根据另一优选实施例的布置在主体10上的多个层11、12、13的简化侧视图。
42.装置100(图1)包括太赫兹(thz)发射器110和thz接收器120,thz发射器110被配置为向例如布置在所述主体10的表面10a上的多个层发射thz信号ts,thz接收器120被配置为接收thz信号ts的已由多个层中的至少一个层11、12、13(图2)反射的反射部分tsr。优选地,
thz信号ts的焦点fp指向包括装置100的光轴oa的主体的表面区域10a'。优选地,部件110、120被布置在形成thz测量头的公共外壳102中。
43.根据另一优选的实施例,thz辐射ts包括在0.3thz和100thz的范围内、优选地在0.5thz和10thz的范围内的至少一个频率分量。
44.装置100(图1)被配置为基于所述thz信号ts的所述反射部分tsr、优选地通过应用时域反射技术来确定多个层11、12、13中的至少一层的层厚度t1、t2、t3(图2)。
45.装置100还包括用于确定表征所述装置100和所述主体10之间的距离d的至少一个参数p1的距离测量设备130,其中,所述距离测量设备130包括至少一个光学三角测量传感器132。光学三角测量传感器132可实现高效而精确的距离测量,并也适用于例如工业生产线等相对恶劣的环境中。优选地,距离测量设备130或其至少一个部件也被布置在所述公共外壳102中和/或被附接至所述公共外壳102。
46.根据另一优选实施例,可以设置控制设备103来控制装置100或其至少一个部件110、120、130的操作。
47.根据另一优选的实施例,参见图3的装置100a,所述距离测量设备130包括两个或更多个光学三角测量传感器。目前,图3示意性地描绘了两个光学三角测量传感器132a、132b。第一三角测量传感器132a被配置为确定表征所述装置100a和所述主体10之间的所述距离d的第一参数p1,并且第二三角测量传感器132b被配置为确定表征所述装置100a和所述主体10之间的所述距离d的第二参数p2。根据另一优选实施例,通过比较参数p1、p2,可以验证所述传感器132a、132b中的任一个的正确操作。根据另一优选实施例,第一参数p1和/或第二参数p2可以对应于所述距离d,即,表示距离d。
48.图4a示意性地描绘了根据另一优选实施例的方法的简化流程图。在第一步骤200中,装置100、100a或其距离测量设备130分别确定表征所述装置与所述主体10之间的所述距离d的所述至少一个参数p1、p2。在另一步骤210中,根据所述至少一个参数p1、p2,装置优选间接地确定多个层11、12、13中的至少一层的层厚度t1、t2、t3(图2)。这样,可以执行特别精确的层厚度测量。根据另一优选的实施例,“根据所述至少一个参数p1、p2间接地确定多个层11、12、13中的至少一个的层厚度t1、t2、t3(图2)”是指:所述至少一个参数p1、p2用于所述层厚度t1、t2、t3的确定过程,但所述层厚度t1、t2、t3不是直接从所述至少一个参数p1、p2导出的。作为示例,根据另一优选实施例,可以确定表征通过所述thz接收器120接收的信号的时间相关信号。基于该时间相关信号,可以确定布置在所述主体10上的多个层11、12、13的层厚度t1、t2、t3。为了在相应的thz测量期间补偿(不期望的)距离变化,可以使用如下文例如参照图9h进一步解释的延迟参数c8,例如用于校正和/或“细化”所述时间相关信号,从而消除(不期望的)距离变化的影响,其中,所述延迟参数c8可以根据所述至少一个参数p1、p2来确定。这样,可以实现更精确的层厚度测量。换句话说,根据另一优选实施例,层厚度t1、t2、t3不是直接根据所述延迟参数c8而确定的,而是所述延迟参数可以用于补偿所述时间相关信号(和/或其时间轴)中的误差,这提高了根据(补偿的)时间相关信号确定所述层厚度时的精度。
49.根据另一优选的实施方案,参见图5a,所述至少一个光学三角测量传感器132a包括一个光源1320和一个光检测器1321,光源1320用于利用光学测量辐射mr照射所述主体10的表面10a的表面10a'区域,其中,所述光学测量辐射mr特别地包括激光辐射,并且光检测
器1321用于接收所述光学测量辐射mr的已由所述表面区域10a'反射的相应反射部分rmr。参考符号sn表示主体10的表面10a的表面法线sn。示例地,箭头mr表征光源1320的光轴。
50.根据另一优选的实施例,光学三角测量传感器132a被配置为,通过以光学三角测量传感器领域本身已知的方式评估所述测量辐射mr的所述反射部分rmr来确定到主体10(也参见图5a)的距离d(图1)。根据另一优选实施例,这也可以应用于根据另一优选实施例的光学三角测量传感器的另一配置132b、132c、132d,以下将参考图5b、图6、图7示例地解释这些配置。
51.根据另一优选实施例,所述至少一个光学三角测量传感器132a相对于所述装置的光轴oa(图1、图5a)布置为,使得所述至少一个光学三角测量传感器132a能够:至少检测由所述至少一个光学三角测量传感器132a的所述至少一个光源1320发射并由所述主体10的表面区域10a'反射的光学测量辐射mr的漫反射,优选仅(或至少在一定程度上)检测光学测量辐射mr的漫反射。如图5a示例地描绘的,这可以例如通过组件100、1320、1321相对于彼此的空间和/或角度布置来实现。
52.根据另一优选的实施例,参见图5b,所述至少一个光学三角测量传感器132b相对于所述装置的光轴oa(图1)布置为,使得所述至少一个光学三角测量传感器132b能够:至少检测由所述至少一个光学三角测量传感器132b的所述至少一个光源1320(图5b)发射并由所述主体10的所述表面区域10a'反射的光学测量辐射mr(图5a)的至少直接反射,优选地仅检测光学测量辐射的直接反射。如图5b示例地描绘,这可以例如通过部件100、1320、1321相对于彼此的空间布置和/或角度布置来实现,例如部件1320、1321相对于光轴oa和/或主体10的表面法线sn的角对称布置。
53.根据另一优选的实施方案,参见图6,所述至少一个光学三角测量传感器132c包括一个光源1320和至少两个光检测器1321a、1321b,光源1320用于利用光学测量辐射mr照射所述主体10的表面区域10a',其中,所述光学测量辐射mr特别地包括激光辐射,至少两个光检测器1321a、1321b用于接收所述光学测量辐射mr的已由所述表面区域10a'反射的相应反射部分rmr1、rmr2。根据另一优选实施例,使用图6的这种配置132c,通过选择用于分析反射的测量辐射rmr1、rmr2的所述光检测器1321a、1321b中的对应的一个,可以选择性地使用(主要)漫反射或(主要)直接反射来确定所述参数p1、p2或使用二者。根据另一优选实施例,光检测器1321a、1321b被布置在相对于光轴oa(也参见图5a)的不同角度位置处。根据另一优选实施例,光检测器1321a、1321b被布置在相对于光轴oa的不同角位置处(也参见图5a)。根据另一优选实施例,第一光检测器1321a可以关于光源1320和光轴oa对称布置,而第二光检测器1321b可以不关于光源1320和光轴oa对称布置。
54.根据另一优选的实施方案,参见图7,所述至少一个光学三角测量传感器132d包括用于利用第一光学测量辐射mr1照射所述主体10的表面区域10a'的第一光源1320a和用于利用第二光学测量辐射mr2照射所述主体10的表面区域10a'的第二光源1320b,其中,所述第一光学测量辐射mr1和/或第二光学测量辐射mr2特别地包括激光辐射,其中,所述至少一个光学三角测量传感器132d还包括至少一个光检测器1321,其用于接收所述第一光学测量辐射mr1和/或第二光学测量辐射mr2的已由所述表面区域10a'反射的反射部分rmr。根据另一优选实施例,光源1320a、1320b被布置在相对于光轴oa的不同角位置处(也参见图5a)。根据另一优选实施例,第一光源1320a可以相对于光检测器1321和光轴oa对称布置,而第二光
源1320b可以不用相对于光检测器1321和光轴oa对称布置。
55.根据另一优选实施例,所述至少一个光学三角测量传感器132c、132d相对于所述装置100、100a的光轴oa配置和布置为,使得所述至少一个光学三角测量传感器132c、132d能够:选择性地检测a)由所述至少一个光学三角测量传感器的至少一个光源1320、1320a、1320b发射并由所述主体10的表面区域10a'反射的光学测量辐射mr的漫反射,由此限定第一三角测量路径,和/或选择性地检测b)由所述至少一个光学三角测量传感器的至少一个光源1320、1320a、1320b发射并由所述主体10的所述表面区域10a'反射的光学测量辐射的直接反射,由此限定第二三角测量路径。特别地,图6、7的示例性配置能够选择性地使用在所述物体的所述表面10a处的测量辐射的直接反射和/或漫反射。
56.作为示例,出于说明的目的,第一三角测量路径((至少主要)漫反射情况)可以被认为包括例如图6的箭头mr、rmr2,并且第二三角测量路径((至少主要)直接反射情况)可以被认为包括例如图6的箭头mr、rmr1。作为另一示例,出于说明的目的,第一三角测量路径((至少主要)漫反射情况)可以被认为包括例如图7的箭头mr2、rmr和第二三角测量路径((至少主要)直接反射情况)可以被认为包括例如图7的箭头mr1、rmr。
57.根据另一优选的实施例,如果待测表面10a的表面法线sn不在由例如箭头mr、rmr(图5a)和/或图6的元件1320、1321之间的箭头定义的三角平面内,则可以获得漫反射。是否使用所述测量辐射mr的漫反射和/或直接反射可以(根据另一优选实施例)例如由所述光学三角测量传感器的元件的光轴oa相对于表面法线sn的角度布置来确定。
58.根据另一优选的实施例,至少一个光学三角测量传感器(和/或其至少一个组件)的所述光源和/或光检测器中的至少一个可以是优选围绕表面10a上的thz辐射的焦点fp,能够移动的,特别是能够旋转的,从而控制漫反射和/或直接反射进行测量。
59.根据另一优选实施例,如果待测表面10a的表面法线sn在例如由箭头mr、rmr(图5a)定义的三角平面内,并且如图5a所示,如果箭头mr、rmr不包括与表面法线sn具有相同值的相应角度,则可以获得测量辐射mr的漫反射。
60.根据另一优选实施例,如果待测表面10a的表面法线sn不在例如由箭头mr、rmr(图5a)定义的三角平面内,与在相应箭头mr、rmr和表面法线sn之间定义的角度无关,则可以获得获得辐射mr的漫反射。
61.根据另一优选实施例,可以通过相对于表面法线sn并因此相对于主体10对测量头102进行定位来控制待测表面10a的表面法线sn是否在三角平面内。
62.根据另一优选实施例,相对于测量头102的光轴oa(例如,元件1320、1321的相应光轴与光轴oa之间的相同角度)的元件1320、1321的光轴的对称布置可以例如通过设计实现,例如通过相对于测量头102或测量头102的(其他)部件110、120对称地布置元件1320、1321。类似地,根据另一优选的实施例,可以获得不对称布置,例如,通过相对于测量头102或测量头102的(其他)部件110、120不对称地布置元件1320、1321(和/或其他元件)。
63.根据另一优选的实施例,测量辐射mr、mr1、mr2的漫反射用于无光泽表面10a到轻微散射表面10a。
64.根据另一优选的实施例,如果待测表面10a的表面法线sn在例如由箭头mr、rmr(图5a)定义的三角平面内,并且如图5b所示,如果箭头mr、rmr确实包括与表面法线sn具有相同绝对值的相应角度,则可以获得测量辐射mr的直接反射。
65.根据另一优选的实施例,测量辐射mr、mr1、mr2的直接反射用于光泽表面10a到轻微散射表面10a。
66.根据另一优选的实施例,每个传感器多于两个光源和/或每个传感器多于两个检测器也是可能的,其中,还可以提供用于距离测量的另一自由度。这样,根据另一实施例实现了可靠且精确的距离测量,这基本上独立于例如层11、12、13的表面特性(例如光泽的和/或无光泽的表面等)。
67.根据另一优选的实施例,可以为每个传感器提供一个或多个光源和/或为每个传感器提供多于两个检测器,和/或可以为每个传感器提供多于一个光源和至少一个检测器。所述光源和检测器可以相对于彼此定位和布置,使得定义多个三角测量路径,其中,至少一个三角测量路径能够基于对测量辐射的直接反射的评估来执行距离测量,并且其中,至少一个另外的三角测量路径能够基于测量辐射的漫反射的评估来执行距离测量。根据另一优选实施例,可以动态地(即,在所述装置的操作期间)选择所述三角测量路径中的至少一个以用于一个或多个距离测量。
68.根据另一优选的实施方案,参见图4b的流程图,所述装置被配置为确定220所述第一三角测量路径mr、rmr2(图6)和所述第二三角测量路径mr、rmr1的质量度量qm,并且根据所述质量度量qm选择222(图4b)所述第一三角测量路径和所述第二三角测量路径中的一个,其中,所述质量度量qm例如表征与所述第一三角测量路径和所述第二三角测量路径中的相应的一个相关联的多个距离测量的方差和/或噪声。这样,基于所述质量度量qm,可以为(未来的)距离测量确定和/或选择所述三角测量路径中的被认为产生更准确的距离测量值的那些三角测量路径。这例如能够为光泽表面10a选择适当的三角测量路径并且例如为哑光表面10a选择(不同的)适当的三角测量路径。
69.根据另一优选实施例,根据图4b的步骤220、222可以例如(至少可选地)在基于thz信号的层厚度测量之前执行,例如在根据图4a的步骤200、210之前。
70.图8示意性地描绘了根据另一优选实施例的配置。装置100被安装在诸如机器人的定位系统104上,其能够将测量头102灵活地放置在期望的位置和/或角位置以相对于对象10'进行精确的层厚度测量。
71.根据另一优选的实施例,可以在所述物体10'(图8)的表面10a(图1)的多个测量点处测量布置在所述物体10'上的至少一个层的至少一个层厚度。根据另一优选实施例,机器人104可以将测量头102相应地定位在各个测量点处,即,一个接一个测量点。根据另一优选的实施例,在每个定位步骤之后(或至少在一个或多个所述定位步骤之后),例如如果已经设置了新的测量点,则可以执行图4b的步骤220、222来确定各个测量点的所述质量度量qm,并且选择222(图4b)对应的三角测量路径以用于在所述各个测量点处的距离测量(图4a的步骤200)。这样,可以进一步提高关于在相应的测量点处距离测量的精度,从而也提高了在所述相应的测量点处的层厚度测量的精度。
72.根据另一优选的实施例,参见图10,所述装置100b包括激光源1002、分束器1004和光学延迟台1006,其中,所述thz发射器110包括thz源112,其中,所述thz接收器120包括thz检测器122,其中,所述激光源1002被配置为向所述分束器1004提供激光信号s0,其中,所述分束器1004被配置为:a)将所述激光信号s0分成第一信号s1和第二信号s2,b)向所述thz发射器110的所述thz源112提供所述第一信号s1,c)可选地经由可选的反射镜1008,向所述光
学延迟台1006提供所述第二信号s2,其中,所述光学延迟台1006被配置为对所述第二信号s2应用预定的时变延迟、优选周期性的延迟,其中,获得了延迟信号s2',并向所述thz接收器120的所述thz检测器122提供所述延迟信号s2'。
73.根据另一优选实施例,组件1002、1004、1006、1006a、1008、112、122中的一个或多个也可以被设置在根据图1的thz测量头102中。
74.根据另一优选实施例,所述thz源112可以包括光电导开关(未示出),其可以响应于从激光源1002接收到所述第一信号s1而产生所述thz信号ts。直流(dc)偏置电压可以被提供给所述光电导开关,但为了清楚起见也未在图10中描绘。优选地,所述激光信号s0包括具有例如在飞秒范围内的持续时间(例如半高全宽,fwhm)的相对较短的激光脉冲。这样,可以以本身已知的方式提供形成所述thz信号ts的thz脉冲。
75.根据另一优选实施例,所述thz检测器122可以被配置为接收所述thz信号ts的所述反射部分tsr并且在接收延迟信号s2'时生成表征所述反射部分tsr的电输出信号es,优选地以多个(与所述thz信号ts的所述接收到的反射部分tsr的持续时间相比)相对较短的激光脉冲的形式。这样,延迟的激光信号s2'“探测”由检测器122接收的所述thz信号ts的反射部分tsr。
76.根据另一优选实施例,所述thz检测器122还可以包括光电导开关(例如,类似于thz源112的光电导开关),其中,当所述thz信号ts的所述反射部分tsr被检测器接收并且当所述检测器122被所述延迟信号s2’(同时)照射时,产生自由电荷载流子。通过向所述检测器122施加dc偏置电压,可以在检测器122处获得由所述产生的自由电荷载流子产生的电流,其可以例如形成电输出信号es。替代地,根据另一实施例,表征所述电流的电压可以用作所述输出信号es。根据另一实施例,放大器(未示出)可用于提供表征由检测器122的光电导开关提供的所述电流的输出电压es。
77.换句话说,所述电输出信号es与所述thz信号ts的接收到的反射部分tsr的瞬时电场成比例。这样,通过以所述延迟信号s2'形式的多个(与所述thz信号ts的所述接收到的反射部分tsr的持续时间相比)相对较短的激光脉冲照射检测器122的光电导开关,可以分别采样或探测接收到的反射部分tsr。通过改变所述延迟信号s2’的延迟,例如通过控制光学延迟台1006,对于所述延迟信号s2'的不同脉冲,可以对所述thz信号ts的接收到的反射部分tsr的不同部分进行采样,从而获得表征所述接收到的反射部分tsr的时间分辨采样信号。
78.根据另一优选的实施例,电输出信号es以例如200千赫兹(khz)的第一采样率被采样,由此获得采样信号,该采样信号是由检测器122接收的所述thz信号ts的所述反射部分tsr的时间离散和值离散的表示,例如与由检测器122接收的所述thz信号ts的所述反射部分tsr相关联的电场的时间离散和值离散的表示。
79.对此,图9a的曲线c1示例地描绘了在第一时间轴t1(其例如可以对应实时)上的所述thz信号ts的所述反射部分tsr的电场幅值[以任意单位]。曲线c1例如对应于所述采样信号es并且可以对应于不存在(或可忽略的)振动的操作场景,根据另一实施例,这可能影响元件102、110、120、130和主体10之间的距离d(图1)。
[0080]
根据另一优选的实施例,所述采样信号的采样和/或进一步处理,参见例如图9a的曲线c1,可以例如是由图1的控制设备103和/或由外部设备(未示出)执行。
[0081]
根据另一优选的实施例,层11、12、13(图2)的层厚度测量可以基于从电输出信号es导出的所述采样信号c1(图9a)来执行。作为示例,可以提供所述主体10上的所述层11、12、13的数学模型,其能够基于所述thz信号ts的所述反射部分tsr和/或所述电输出信号es(例如曲线c1)确定一个或多个所述层的层厚度t1、t2、t3。
[0082]
根据另一实施例,所述光学延迟台1006(参见图10)可以包括角反射器1006a,参见图10的方框箭头a1,该角反射器1006a例如是能够沿坐标轴x平移移动的。这种配置也可以被称为“振动器”1006。
[0083]
通过沿坐标轴x周期性地移动所述角反射器1006a,可以将所述预定的时变延迟、优选周期性的延迟应用于所述第二信号s2,如上所述,这使得能够以时间分辨的方式对所述thz信号ts的接收到的反射部分tsr进行采样。
[0084]
根据另一实施例,所述角反射器1006a的位置和/或移动可以由所述控制设备103控制。优选地,根据另一实施例,所述角反射器1006a的所述位置和/或移动可以与所述thz信号ts的脉冲的产生和/或随着激光源1002的操作同步。
[0085]
根据另一实施例,所述角反射器1006a沿所述坐标轴x在两个端点(未示出)之间周期性地移动。为此目的,可以提供用于驱动所述角反射器1006a的所述运动的平移台(未示出)和/或任何其他合适的(例如线性的)驱动器。所述驱动器可以例如由控制设备103控制。
[0086]
在图9b中,曲线c2示例地描绘了所述角反射器1006a随时间t1的伸长率(elongation),其中使用了如图9a所描绘的表征实时的相同时间轴t1。可以看出,所述伸长率c2示例地包括基本上正弦的形状。根据另一优选实施例,根据控制信号,如例如由控制设备103提供的用于驱动所述角反射器1006a的控制信号,关于随时间t1的所述伸长率c2的信息可以由控制设备103确定。替代地或额外地,根据另一实施例,还可以测量随时间t1的所述伸长率c2。
[0087]
根据另一实施例,thz时基t1'(参见图9c的曲线c3)可以基于图9b的曲线c2来确定。换句话说,曲线c3将已经获得所述采样信号c1(图9a)的实时轴t1映射到与接收到的反射thz脉冲tsr相关联的另一时间轴t1'。应注意的是不同的标度,对于实时轴t1而言,标度范围为t1=0s到t1=0.05s,而对于thz时基t1’而言,标度范围为
‑
5x10
‑
11
s到
‑
5x10
‑
11
s。
[0088]
根据另一实施例,所述thz时基t1'可以用于将采样信号c1(图9a)映射到thz时基t1',参见图9d的曲线c4,其表示在thz时基t1'上所述接收到的反射thz脉冲tsr的电场[以任意单位]。根据另一实施例,可以应用曲线c4的等距内插,其产生曲线c4'。
[0089]
根据另一实施例,由曲线c4’表示的信号可以用于确定所述主体10上的所述层11、12、13中的一个或多个的层厚度。
[0090]
以上参照图9a至图9d解释的实施例基于这样的假设:在向主体10发射所述thz信号ts并且检测器122接收到所述thz信号ts的所述反射部分tsr的时间间隔中不存在振动或至少不存在实质性振动。
[0091]
然而,如果根据另一实施例存在振动(这对于例如安装到定位系统104(图8)的测量头102的实际应用是预期的),这可能会影响层厚测量的精度,因为所述振动通常会导致设备110、120、130和主体10之间的距离d(图1)发生不期望的变化。
[0092]
为了解决潜在的振动,根据另一优选实施例,装置100、100a、100b被配置为确定延迟参数,在将由所述光学延迟台1006提供的预定的时变延迟、优选周期性的延迟以及所述
装置100和所述主体10之间的所述距离d的变化(例如由所述振动引起)考虑在内的条件下,所述延迟参数表征所述延迟信号s2'(图10)的有效延迟,其中,优选地,所述装置被配置为根据所述延迟参数确定所述层厚度。
[0093]
换句话说,根据另一优选实施例,在确定所述层厚度时,将设备110、120、130和主体10之间的所述距离d随时间的变化考虑在内。有利地,可以以所述延迟参数的形式考虑所述距离d的随时间的变化,这使得能够对可能影响层厚度测量的精度的两种效应进行组合处理:a)由光学延迟台1006引入的延迟,这是期望的,因为它能够获得thz信号或脉冲ts的反射部分tsr的电场的采样的,即,时间分辨的信号形状,以及b)由振动引入的延迟由于其影响精度而通常是不期望的。
[0094]
根据另一优选的实施例,装置100例如通过使用所述距离测量设备130执行距离测量,其中,优选地以1khz(千赫兹)以上、优选地10khz以上(例如20khz)的速率执行距离测量。进一步优选地,所述距离测量与所述thz信号ts的发射和/或所述反射部分tsr的接收同步。这样,设备110、120、130和主体10之间的距离变化可以被确定并且可以被考虑用于层厚度测量。根据另一优选实施例,并且如上所述地,在执行所述距离测量之前,例如根据如上参考图4b所解释的质量度量qm,所述装置可以首先确定用于所述距离测量的合适的三角测量路径。
[0095]
作为示例,图9e的曲线c5示例地描绘了在所述第一时间轴t1(例如可以对应实时)上的所述thz信号ts的所述反射部分tsr的电场幅值[以任意单位],其中,描绘了0.05秒的示例性时间范围,类似于图9a的曲线c1。然而,与图9a相反,图9e的曲线c5对应于存在非零振动的操作场景,导致在thz测量期间所述距离d(图1)的不期望的变化。
[0096]
在图9f中,类似于图9b的曲线c2,曲线c6示例地描绘了所述角反射器1006a随时间t1(即,与图9e描绘的表征实时的相同时间轴)的伸长率。根据另一实施例,如上所述,所述角反射器1006a随时间t1的所述伸长率c6可以从用于驱动所述角反射器1006a的所述运动的驱动器的(已知)控制信号和/或通过测量来确定。
[0097]
图9g示意性地描绘了距离d(图1)随时间t1的变化,参见曲线c7,目前以以毫米为单位测量的正弦振荡的形式示例。应注意的是,图9g的曲线c7并未描绘绝对距离d,而是描绘例如由所述振动引起的距离的不期望的时变部分。从图9g可以看出,由于所述振动,绝对距离随时间变化约0.2毫米(mm),这可能导致基于thz信号的层厚度测量的显着误差,原因在于由于经由包括thz发射器110的测量路径、从所述thz发射器110到所述主体10的传输路径以及从所述主体10到thz接收器120的传输路径的信号传播效应,这些基于thz信号的层厚度测量至少间接地取决于的所述距离d。
[0098]
根据另一实施例,可以以例如通过从所述距离d的所述测量值中减去所述绝对距离测量值的平均值而在预定速率(例如20khz)下从所述(绝对)距离d(图1)的测量中导出所述变化c7。有利地,所述距离测量可以通过所述距离测量设备130(图1)来执行。
[0099]
根据另一实施例,可以根据第一参数p1和/或第二参数p2来执行关联时间轴的校正,其中,可以选择第一参数p1或第二参数p2,即,取决于相关三角测量路径的相应的质量度量qm。
[0100]
根据另一实施例,基于所述角反射器1006a的实际伸长率(参见图9f的曲线c6)并且基于测量到的振动/距离d的变化(参见图9g的曲线c7)来确定所述角反射器1006a的有效
伸长率,例如通过将所述角反射器1006a的实际伸长率c6与距离d的所述变化c7叠加。图9h描绘了如此获得的随时间t1的有效伸长率,参见曲线c8。这有利地解释了由于所述振动引起的时变距离d。由于振动可能影响反射部分tsr在到达检测器122之前经历的延迟,因此它们可以与所述角反射器1006a的伸长率结合以实现有效率的处理。
[0101]
根据另一实施例,如果不同的时基用于曲线c6、c7,则所述曲线c6、c7中的至少一个例如通过内插(interplation)或抽取(decimation)可以适用于另一曲线。
[0102]
根据另一实施例,角反射器1006a的有效伸长率c8可以表示和/或可以用作上述延迟参数,在将由所述光学延迟台1006提供的预定的时变延迟、优选周期性的延迟以及所述装置100、100a、100b和所述主体10之间的所述距离d的变化c7(图9g)考虑在内的条件下,上述延迟参数表征所述延迟信号s2'(图10)随时间t1的有效延迟。应注意的是,根据另一实施例,尤其是所述装置100和所述主体10之间的所述距离d的所述变化c7(图9g)也可以是非周期性的或者可以包括另一种(任意的)形状,这取决于例如关于可能导致所述振动的外部影响。
[0103]
根据另一实施例,类似于图9c,thz时基t1'(参见图9i的曲线c9)可以基于图9h的曲线c8来确定。换句话说,曲线c9将已经获得所述采样信号c5(图9e)的实时轴t1映射到与接收到的反射thz脉冲tsr相关联的另一时间轴t1’。
[0104]
根据另一实施例,所述thz时基t1'(参见图9i的曲线c9)可用于将采样信号c5映射到thz时基t1'(参见图9j的曲线c10),其表示在thz时基t1’上所述接收到的反射thz脉冲tsr的电场[以任意单位]。根据另一实施例,可以应用曲线c10的等距内插,其产生曲线c10’。由于在确定所述信号c10时将上述例如由于振动引起的不期望的距离变化考虑在内,根据另一实施例,该距离变化可以被认为是“振动补偿”信号,该“振动补偿”信号实现了特别精确的基于thz信号的层厚度测量。
[0105]
为了比较,图9j还描绘了另一曲线c11,其表示在不考虑振动的条件下随时间变化(thz时基t1')的采样信号。由于不期望的振动,曲线c11包括显着不同的形状,其中,根据另一优选的实施例,当基于曲线c11确定层厚度而不是基于曲线c10、c10’确定层厚度时,可能预期到对应的误差。
[0106]
以上参照图9e至图9j解释的实施例示例地说明了,根据另一优选的实施例,即使存在不期望的振动,也可以进行精确的层厚度测量或层厚度确定。
[0107]
根据另一优选实施例,所述装置100、100a、100b被配置为确定所述延迟参数,参见例如图9h的曲线c8,在将由所述光学延迟台1006提供的预定的时变延迟、优选周期性的延迟以及例如由于振动导致的所述装置100、100a、100b和所述主体10之间的所述距离d的(不期望的)变化考虑在内的条件下,所述延迟参数表征所述延迟信号s2'(图10)的有效延迟,其中,优选地,所述装置被配置为根据所述延迟参数c8确定210(图4a)所述层厚度t1、t2、t3。这样,可以实现对振动的不期望的影响(例如,特别是在thz测量期间距离d的变化)的补偿(如果不是消除)。
[0108]
根据另一优选的实施例,根据实施例的装置可以有利地与机器人104(图8)和/或例如制造工厂的在线配置中的其他定位系统一起使用,其中,例如根据另一优选实施例,可以至少部分地补偿由所述定位系统104引起的不期望的振动。这样,可以进行特别精确的层厚度测量。
[0109]
根据另一优选的实施例,根据实施例(例如,根据图1、图3、图5a、图5b、图6、图7)的距离测量设备130的任何配置(或组合)可用于确定距离d的随时间t1的变化c7。
[0110]
根据另一优选实施例,距离测量设备130可以被配置为以预定的测量速率例如1khz、优选地10khz或20khz确定所述距离d。根据另一优选的实施例,距离测量设备130和/或控制设备103可以确定例如基于测量的距离d的距离d随时间t1的变化c7(图9g)。
[0111]
图4c示意性地描绘了根据另一优选实施例的方法的简化流程图。在步骤230中,装置100产生thz信号ts并确定预定第一时间窗口中的距离d。优选地,所述距离d的所述确定包括在所述第一时间窗口期间例如以20khz的测量速率执行多个距离测量。在步骤232中,装置100接收thz信号ts的反射部分tsr。在步骤234中,装置100确定振动器伸长率(图9f的曲线c6),例如在t1=0到t1=0.05范围内的预定时间间隔内。优选地,所述第一时间窗可以与所述预定时间间隔相同。
[0112]
此外,在步骤234中,还可以基于所述角反射器1006a的实际伸长率(图9f的曲线c6,也如在步骤234中确定的)并且基于距离d的变化(参见图9g的曲线c7)来确定所述角反射器1006a(图10)的有效伸长率c8(图9h),其中,距离d的所述变化可以是例如基于所述第一时间窗口期间的所述多个距离测量来确定的,如在步骤230中执行的。例如,可以例如通过将所述角反射器1006a的实际伸长率c6与距离d的所述变化c7的叠加来获得所述角反射器1006a的所述有效伸长率c8(图9h)。
[0113]
在步骤236(图4c)中,可以基于在图4c的步骤234中确定的所述有效伸长率c8并且基于在步骤232中获得的thz信号ts的所述接收到的反射部分tsr来确定所述层11、12、13(图2)中的一个或多个层的厚度。
[0114]
根据另一优选实施例,步骤230、232、234、236或其子步骤中的至少一些也可以至少部分重叠或同时执行。作为示例,所述距离d的确定和所述振动器伸长率的确定可以同时或准同时进行。
[0115]
图11示意性地描绘了根据另一优选实施例的控制设备1030的简化框图。根据另一优选实施例,图1的可选控制设备103可以包括与图11的控制设备1030相同或至少相似的配置。
[0116]
根据另一优选实施例,控制设备1030包括至少一个计算单元1032和至少一个存储单元1034,至少一个存储单元1034与至少一个计算单元1032相关联(即,由其使用)以用于至少临时存储计算机程序prg,其中,所述计算机程序prg被配置为至少临时控制所述控制设备1030和/或所述装置100和/或所述装置100的至少一个组件104、110、120、130的操作。根据另一优选实施例,计算机程序prg被配置为执行根据实施例的方法。
[0117]
根据另一优选实施例,计算单元1032包括以下元件中的至少一个:微处理器、微控制器、数字信号处理器(dsp)、可编程逻辑元件(例如,fpga,现场可编程门阵列)、asic(专用集成电路)、硬件电路。根据另一优选实施例,这些元件中的两个或更多个的任何组合也是可能的。
[0118]
根据另一优选实施例,存储单元1034包括以下元件中的至少一个:易失性存储器1034a(特别是随机存取存储器(ram))、非易失性存储器1034b(特别是flash
‑
eeprom)。优选地,所述计算机程序prg被存储在所述非易失性存储器1034b中。
[0119]
根据另一优选实施例,控制设备1030包括第一接口1036,其能够与thz发射器110
和/或thz接收器120和/或距离测量设备130进行数据通信d1和/或控制thz发射器110和/或thz接收器120和/或距离测量设备130。
[0120]
另一优选的实施例涉及根据实施例的装置和/或根据实施例的方法用于确定布置在主体的表面上的多个层的层厚度的用途,其中,优选地,所述主体和/或所述主体的所述表面可以是导电的或者可以包括介电材料,其中,优选地,所述多个层中的顶层包括透明涂层,并且其中,优选地,与所述顶层相邻的第二层包括底涂层。作为示例,所述主体可以代表诸如汽车的车辆的一部分,并且所述多个层可以包括油漆层。
[0121]
根据优选实施例的原理能够精确地确定距离d和/或所述距离d的变化,从而可以执行精确的基于thz信号的层厚度测量,其中,可以在将距离d和/或所述距离d的变化考虑在内的条件下确定所述层厚度。特别地,上述优选实施例中的至少一些可以至少暂时提供以下优点中的至少一个:a)例如低至sub
‑
μm(微米)范围的高精度;b)可以容忍例如光学三角测量传感器的光轴和thz测量头102的光轴之间高达1
°
(度)的角位移;c)关于距离测量(例如, /
‑
10mm)的大操作范围;d)适用于到主体10(图1)的所述距离d的相对较大的值;e)将thz信号ts的焦点fp与光轴和/或光学三角测量传感器的测量点对准的可能性;f)层11、12、13和主体10的结构和/或组成和/或形状的各自独立性,尤其是表面层13(无光泽/有光泽的表面)的独立性;g)具有成本效益。
[0122]
根据另一优选实施例,除了光学三角测量传感器之外,还可以使用一个或多个距离测量设备。根据另一优选的实施例,作为光学三角测量传感器的替代或补充,还可以使用基于以下测量原理中的至少一个的一个或多个距离测量设备:电子距离测量设备、声学距离测量设备、除光学三角测量传感器以外的光学距离测量设备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。