1.本发明涉及自动化机器人的技术领域,尤其是指一种树木几何整形修剪机器人系统及其作业方法。
背景技术:
2.树木修剪作业是果园生产或园林维护过程中最重要的环节及属于劳动密集型工作,修剪作业需求贯穿了整个树枝生长环节。通过合理的修剪,可展示树木的艺术效果及构建标准化果园或园林,也可调控树枝的生长速度和方向以及分枝数量和角度,从而改善其通风透光条件、使得成龄果树优质、高产、稳产。
3.目前,树木整形修剪工作大多数仍然靠着人工手握修剪刀或者背负电动、气动修剪机具进行,劳动强度较大并且存在一定安全隐患。大型标准化果园或园林的粗枝修剪则交付给搭载修剪机具的拖拉机上进行,修剪刀具常见为往复式刀条及圆盘锯片两种,虽然实现了机械化作业,但是由于拖拉机较为庞大的体积,需增加为其留出行驶的路径宽度,从而缩小了树木栽种面积,并且仍然需要人工辅助操作,且对于人工操作要求较高。全自动化的修剪作业在草坪修剪领域较为常见,但在树木修剪领域鲜见报道,树木修剪的作业场景为空间修剪,与草坪的平面修剪有本质区别。
4.发明专利201610221814.7提出了一种全自动树枝修剪机器人及修剪方法,在于双目视觉导航定位后采用抱住树干或树枝进行旋转切割的修剪作业,具有新颖性但是缺点是在室外环境下,如果仅靠相机视觉进行导航,环境光照很大程度上影响着导航质量,同时夹抱枝干的修剪形式不适于大规模作业。
5.发明专利201710079996.3提出了一种智能树木修剪机器人及设备,具体为一种搭载修剪刀具的四轴飞行器,具有一定便携性,但是以无人机作为移动载具存在着一定安全隐患,也不适用于大规模修剪作业。
6.发明专利201810271399.5提出了一种沿地线行走高压输电线路走廊树枝修剪机器人及控制方法,作业场景在于修剪高压输电路线走廊的树枝,以避免引起输电线路安全事故。该发明实用性强,修剪效率高,但仅限于在特定场景工作。
7.为提高修剪效率、降低人工劳动强度及运营成本,亟需设计一种适用于多场景、全自动、高效且可靠的树木整形修剪机器人。
技术实现要素:
8.本发明目的在于为解决现有技术中的不足,提供了一种树木几何整形修剪机器人系统及其作业方法,在现场构建的局域地图信息下联动履带移动底盘与修剪机械臂协同作业,实现自动化作业,不仅能够提高作业效率并且大幅降低运营成本,同时也可保证修剪作业的安全性。
9.为实现上述目的,本发明所提供的技术方案为:一种树木几何整形修剪机器人系统,包括修剪机器人以及与所述修剪机器人通讯连接的控制终端,所述修剪机器人包括履
带移动底盘、安装在履带移动底盘上的修剪机械臂、控制柜和用于驱动修剪机械臂的液压系统,该修剪机器人系统还包括感知导航系统以及布置在控制柜中的运算控制系统,所述感知导航系统包括双目视觉相机、激光雷达、超声波雷达、gnss惯性组合导航仪及编码器,所述双目视觉相机和激光雷达通过支架安装在控制柜上,两者配合检测修剪机器人的周围环境信息,所述超声波雷达安装在履带移动底盘处,用于补充检测区域及避障,所述gnss惯性组合导航仪安装在修剪机器人处,用于输出修剪机器人的绝对定位坐标、角速度、加速度及航向角,所述编码器有多个分别安装在修剪机械臂和履带移动底盘处,用于感知修剪机械臂和履带移动底盘的状态,所述运算控制系统分别与感知导航系统和液压系统通讯连接,能够根据采集感知导航系统的周围环境信息和修剪机器人的自身状态信息控制履带移动底盘的移动及修剪机械臂的姿态刀位。
10.进一步,所述运算控制系统集成有工控机、单片机、供电电源与配电系统以及收发电台;所述单片机设置有传感器数据采集模组,所述传感器数据采集模组与感知导航系统通讯连接,负责采集感知导航系统的信息;所述工控机与传感器数据采集模组通讯连接,且其设置有同步定位与建图模组、无线数传模组及运动规划和动作控制模组;所述同步定位与建图模组与传感器数据采集模组通讯连接,用于实现修剪机器人的自主定位和导航并建造增量式地图;所述无线数传模组与控制终端通讯连接,用于输入控制终端设定的树木修剪几何形状并输出修剪机器人的信息到控制终端;所述运动规划和动作控制模组分别与修剪机械臂和履带移动底盘通讯连接,用于对修剪机械臂和履带移动底盘进行动作规划和动作控制。
11.进一步,所述修剪机械臂包括活动式机械节臂、刀架和圆盘锯,所述活动式机械节臂的一端固定在履带移动底盘上,其另一端安装有所述刀架,所述圆盘锯有多个安装在刀架内,并通过同步带实现相互连接,用于实现转矩传递和同步转速,所述活动式机械节臂和刀架分别与液压系统连接,由液压系统驱动活动式机械节臂的运动与圆盘锯的转动。
12.一种上述树木几何整形修剪机器人系统的作业方法,包括以下步骤:
13.s1、设置修剪机器人的跟随方式,并在控制终端输入修剪树木的目标几何形状,通过无线数传将该目标几何形状传输至修剪机器人系统的运算控制系统中;
14.s2、若修剪机器人在已知环境地图下作业,则直接进行步骤s3;若修剪机器人在未知环境地图下作业,则通过修剪机器人系统的感知导航系统进行行驶通道感知,并通过修剪机器人系统的运算控制系统进行路径规划和动作控制,使修剪机器人跟随规划的路线移动;
15.在修剪机器人跟随规划的路线移动过程中,修剪机器人系统的感知导航系统感知周围树木环境和障碍物,修剪机器人系统的运算控制系统融合多传感信息构建增量式三维地图,即构建局域地图,最后修剪机器人沿着规划的路线回到起点,完成对作业环境的感知;
16.s3、根据设定修剪的目标几何形状和增量式三维地图,规划修剪机械臂的修剪次数和各次修剪次数的姿态刀位,驱动修剪机械臂到初始姿态刀位及驱动修剪机械臂的圆盘锯准备修剪,再根据修剪机械臂的运动规划作业需求重新规划路线,并控制修剪机器人跟随重新规划的路线行驶在行驶通道内;
17.s4、修剪机器人跟随途经的树木变化姿态刀位及其对应的行驶路径,在行驶通道
内折返移动直至完成修剪工作。
18.进一步,在步骤s1中,所述修剪机器人的跟随方式为基于超宽带定位技术的自动跟随或使用控制终端的遥控跟随。
19.进一步,在步骤s2中,具体为:
20.若修剪机器人在未知环境地图下作业,则通过修剪机器人系统的双目视觉相机及激光雷达共同配合和冗余感知用警示桩标记的行驶通道,并实时通过修剪机器人系统的运算控制系统的运动规划和动作控制模组进行迭代式修剪机器人行驶路径规划,从而驱动并控制修剪机器人跟随规划的路线移动;
21.修剪机器人系统的双目视觉相机及激光雷达共同配合和冗余感知周围树木环境,修剪机器人系统的超声波雷达覆盖在行驶过程中激光雷达与双目视觉相机对前后端障碍物的检测盲区,以实现自动避障,再调用运算控制系统的同步定位与建图模组,根据修剪机器人移动位置和地图进行自身定位,并在该自身定位的基础上建造增量式三维地图,最后使修剪机器人沿着规划的路线回到起点,完成感知作业环境的过程。
22.进一步,在步骤s3中,具体为:
23.运算控制系统的运动规划和动作控制模组结合目标几何形状及同步定位与建图模组构建的增量式三维地图,规划修剪机械臂的修剪次数和各次修剪次数的姿态刀位,再通过运动规划和动作控制模组启动液压系统驱动修剪机械臂到初始姿态刀位及驱动修剪机械臂的圆盘锯准备修剪,运动规划和动作控制模组根据修剪机械臂的运动规划作业需求重新规划路线,并控制修剪机器人跟随重新规划的路线行驶在行驶通道内。
24.本发明与现有技术相比,具有如下优点与有益效果:
25.1、本发明中的修剪机械臂运动规划是结合了自定义的几何形状目标及增量式三维地图,从而规划所需修剪次数与各修剪次数的精准姿态刀位,之后再结合每次的修剪姿态刀位确定行驶路径,不断往复修剪从而完成立体的几何修剪作业;而传统的半自动悬挂修剪臂的拖拉机式修剪作业需要人工凭借经验,而同样类型的修剪机器人则需要遥控来进行作业,均未能实现精准作业。因此,本发明提高了树木的观赏性、精准作业能力,实现了多样化修剪样式,也提升了无人果园、无人园林的全自动化水平。
26.2、本发明通过循迹作业通道后增量式构建出增量式三维地图,克服了现有移动底盘如自动割草机等仅依靠全局定位信息进行作业的现状,避免了由于树枝遮盖丢失定位信息,同时也可实现追踪树干进行树枝遮盖下作业。
27.3、本发明能够根据位置定位信息的反馈,实时调整规划路径,同时超声波雷达在修剪机器人行驶过程中实时收集地面信息,如果遇到难以通过的障碍物,将重新规划路径躲避障碍物,保证了安全性。
28.4、本发明能够实现自动跟随,更为简单便捷,规划的路径线不仅考虑了自身能否跟随及最短路径,也考虑了对于周围障碍物的躲避;启动远距离召回时,会启动激光雷达与双目视觉相机感知周围信息,从而避免规划的路径陷入狭窄环境里不断盲目的探索,能够得出更优的规划路径。
附图说明
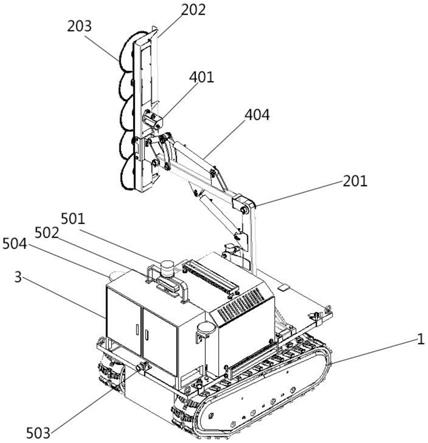
29.图1为树木几何整形修剪机器人系统的结构示意图。
30.图2为树木几何整形修剪机器人系统的控制原理图。
31.图3为液压系统的原理图。
32.图4为树木几何整形修剪机器人系统的作业方法流程图。
具体实施方式
33.下面结合具体实施例对本发明作进一步说明。
34.参见图1至图3所示,为本实施例所提供的树木几何整形修剪机器人系统,包括修剪机器人以及与所述修剪机器人通讯连接的控制终端(图中未画出),所述修剪机器人包括履带移动底盘1、安装在履带移动底盘上的修剪机械臂、控制柜3和用于驱动修剪机械臂的液压系统,该树木几何整形修剪机器人系统还包括感知导航系统以及布置在控制柜3中的运算控制系统,所述感知导航系统包括双目视觉相机502、激光雷达501、超声波雷达503、gnss惯性组合导航仪504及编码器(图中未画出),所述双目视觉相机502和激光雷达501通过支架安装在控制柜3上,两者配合检测修剪机器人的周围环境信息,所述超声波雷达503安装在履带移动底盘处,用于补充检测区域及避障,所述gnss惯性组合导航仪504安装在修剪机器人处,用于输出修剪机器人的绝对定位坐标、角速度、加速度及航向角,所述编码器有多个分别安装在修剪机械臂和履带移动底盘1处,用于感知修剪机械臂和履带移动底盘1的状态,所述编码器为用于检测修剪机械臂的圆盘锯转速的圆盘锯旋转编码器、用于检测履带移动底盘转速及角位移的底盘驱动轮旋转编码器和用于检测液压系统的液压缸位移的液压缸位移行程拉绳编码器,所述运算控制系统分别与感知导航系统和液压系统通讯连接,能够根据采集感知导航系统的周围环境信息和修剪机器人的自身状态信息控制履带移动底盘的移动及修剪机械臂的姿态刀位。
35.所述运算控制系统集成有工控机、单片机、供电电源与配电系统以及收发电台(图中未画出);所述单片机设置有传感器数据采集模组,所述传感器数据采集模组与感知导航系统通讯连接,负责采集感知导航系统的信息;所述工控机与传感器数据采集模组通讯连接,且其设置有同步定位与建图模组、无线数传模组及运动规划和动作控制模组;所述同步定位与建图模组与传感器数据采集模组通讯连接,用于实现修剪机器人的自主定位和导航并建造增量式地图;所述无线数传模组与控制终端通讯连接,用于输入控制终端设定的树木修剪几何形状并输出修剪机器人的信息到控制终端;所述运动规划和动作控制模组分别与修剪机械臂和履带移动底盘1通讯连接,用于对修剪机械臂和履带移动底盘1进行动作规划和动作控制。
36.所述液压系统包括圆盘锯驱动组、活动式机械节臂驱动组、汽油机407、油尺408、油箱409、冷却风扇410、油泵411、溢流阀412和电磁泄压阀413;所述圆盘锯驱动组包括依次串联的液压马达401、第一平衡阀402和第一电液比例方向阀403,且其安装在修剪机械臂的刀架202处,所述活动式机械节臂驱动组包括三组依次串联的液压缸404、第二平衡阀405和第二电液比例方向阀406,且其安装在修剪机械臂的活动式机械节臂201处,所述汽油机407、油尺408、油箱409、冷却风扇410、油泵411、溢流阀412和电磁泄压阀413与圆盘锯驱动组和活动式机械节臂驱动组串联,用于调整修剪机械臂的位姿刀位。电液比例方向阀作用在于换向与流量比例控制,加上闭环控制实现对液压缸404行程与液压马达401转速的精确调节;平衡阀作用在于调节到合适的开启压力后,当电液比例方向阀关闭时,可锁住液压缸
及使液压马达较为快速停止,预防安全事故发生;而在电液比例方向阀开启时,平衡阀一端由高压油推动进油,另一端由先导回路直接进行回油;
37.所述修剪机械臂包括活动式机械节臂201、刀架202和圆盘锯203,所述活动式机械节臂201的一端固定在履带移动底盘1上,其另一端安装有所述刀架202,所述活动式机械节臂201与液压系统的液压缸404连接,所述刀架202与液压系统的液压马达401连接,所述圆盘锯203有五个安装在刀架202内,并通过同步带实现相互连接,用于实现转矩传递和同步转速。
38.参见图4所示,下面为本实施例的树木几何整形修剪机器人系统的作业方法,包括以下步骤:
39.s1、设置修剪机器人的跟随方式,并在控制终端输入修剪树木的目标几何形状,通过无线数传将该目标几何形状传输至修剪机器人系统的运算控制系统中;所述修剪机器人的跟随方式为基于超宽带定位技术的自动跟随或使用控制终端的遥控跟随;
40.s2、若修剪机器人在已知环境地图下作业,则直接进行步骤s3;若修剪机器人在未知环境地图下作业,具体如下:
41.若修剪机器人在未知环境地图下作业,则通过修剪机器人系统的双目视觉相机502及激光雷达501共同配合和冗余感知用警示桩标记的行驶通道,并实时通过修剪机器人系统的运算控制系统的运动规划和动作控制模组进行迭代式修剪机器人行驶路径规划,从而驱动并控制修剪机器人跟随规划的路线移动。
42.在修剪机器人跟随规划的路线移动过程中,修剪机器人系统的感知导航系统感知周围树木环境和障碍物,修剪机器人系统的运算控制系统融合多传感信息构建增量式三维地图,即构建局域地图,最后修剪机器人沿着规划的路线回到起点,完成对作业环境的感知,具体如下:
43.修剪机器人系统的双目视觉相机502及激光雷达501共同配合和冗余感知周围树木环境,修剪机器人系统的超声波雷达503覆盖在行驶过程中激光雷达501与双目视觉相机502对前后端障碍物的检测盲区,以实现自动避障,再调用运算控制系统的同步定位与建图模组,根据修剪机器人移动位置和地图进行自身定位,并在该自身定位的基础上建造增量式三维地图,最后使修剪机器人沿着规划的路线回到起点,完成感知作业环境的过程。
44.s3、根据设定修剪的目标几何形状和增量式三维地图,规划修剪机械臂的修剪次数和各次修剪次数的姿态刀位,驱动修剪机械臂到初始姿态刀位及驱动修剪机械臂的圆盘锯准备修剪,再根据修剪机械臂的运动规划作业需求重新规划路线,并控制修剪机器人跟随重新规划的路线行驶在行驶通道内,具体如下:
45.运算控制系统的运动规划和动作控制模组结合目标几何形状及同步定位与建图模组构建的增量式三维地图,规划修剪机械臂的修剪次数和各次修剪次数的姿态刀位,针对树墙修剪和单树修剪两种不同的模式进行不同的姿态刀位规划,单树修剪主要在于追踪树干中心进行环绕修剪,对于树墙修剪则选取各个树干距离通道的均值作为姿态刀位的判断,再通过运动规划和动作控制模组启动液压系统的液压缸404驱动修剪机械臂到初始姿态刀位及液压马达401驱动修剪机械臂的圆盘锯转动准备修剪,运动规划和动作控制模组根据修剪机械臂的运动规划作业需求重新规划路线,并控制修剪机器人跟随重新规划的路线行驶在行驶通道内。
46.s4、修剪机器人跟随途经的树木变化姿态刀位及其对应的行驶路径,在行驶通道内折返移动直至完成修剪工作。
47.以上所述之实施例只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。