1.本实用新型属于墙砖铺设技术领域,尤其涉及一种墙砖自动铺砌机。
背景技术:
2.我国人口众多,随着消费水平不断提高,人们对生活质量的要求也越来越高,像卫生间,厨房等室内较小场所也需要铺砌墙砖来美化生活环境。铺设一个30平方米左右房间的就需要数百块墙砖,人为铺砌还是非常费时费力,危险程度也较大,本自动墙砖铺砌机就是为解决此问题,为解放人类劳动而进行设计的。
3.然而,目前铺砖的主要方式依然为人工铺设和铺设地砖为主,人工铺砖存在着效率低、成本高、质量差等问题。针对目前现状,我们提出一种智能高效铺砖机的设计方案,并对重要部件进行相关仿真分析,但是现有的墙砖铺设设备依然存在着无法实现墙砖的自动抓取和放置;铺砌墙砖不整齐,不能实现墙砖铺设的精确性和美观性;铺砌的效率低的问题。
4.因此,发明一种墙砖自动铺砌机显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种墙砖自动铺砌机,以解决现有的墙砖铺设设备依然存在着无法实现墙砖的自动抓取和放置;铺砌墙砖不整齐,不能实现墙砖铺设的精确性和美观性;铺砌的效率低的问题。一种墙砖自动铺砌机,包括支撑底台,滑动底座,移动基台,移动电机,减速器,控制器,旋转电机,旋转底台,角度调整座,角度调整电机,角度调整基座,调整臂,角度调整机构,长度调整机构,伸缩头,连接板,定位电机和抓取机构,其中:滑动底座通过螺栓安装在支撑底台的表面,且移动基台镶嵌在滑动底座的表面,并通过齿轮进行啮合,该移动电机通过螺栓安装在移动基台的一端;所述减速器通过螺栓安装在移动基台的一端,并通过齿轴与移动电机进行连接,且减速器通过齿轴与移动基台内部的齿轮进行啮合,该控制器通过螺栓安装在减速器的表面;所述旋转电机通过螺栓安装在移动基台的表面,且旋转底台通过螺栓与旋转电机进行连接,该角度调整座通过螺栓安装在旋转底台的后端;所述角度调整基座通过轴承安装在角度调整座的内部,且角度调整电机通过螺栓安装在角度调整座的一侧,并通过齿轴与角度调整基座相连接,该调整臂通过螺栓安装在角度调整基座的前端;所述角度调整机构的一端通过轴承安装在角度调整基座的两侧,且角度调整机构的另一端通过轴承安装在旋转底台的表面,该长度调整机构通过螺栓安装在调整臂一端的内部;所述伸缩头通过螺栓安装在长度调整机构的另一端,且连接板通过轴承安装在伸缩头的一端,该定位电机通过螺栓安装在伸缩头的一侧,并通过齿轴与连接板的底部相连接;所述抓取机构通过螺栓安装在连接板的表面。
6.抓取机构包括支撑外壳,伸展臂,啮合齿,泄气管和抓取吸盘,且伸展臂镶嵌在支撑外壳的四个角的内部,该啮合齿设置在伸展臂的一侧;所述泄气管通过螺纹安装在伸展臂的顶端,该抓取吸盘可通过泄气管安装在伸展臂的顶端;所述抓取吸盘的下表面设置有
超声波测距以及陀螺仪。
7.控制器包括dps模块,无线接收模块,看门狗模块,检测模块,第一驱动模块,第二驱动模块,第三驱动模块,第四驱动模块,第五驱动模块和第六驱动模块,且无线接收模块,看门狗模块和检测模块通过信号线连接在dps模块的输入端,该无线接收模块通过无线信号连接有控制数据传入端;所述dps模块的输出端通过信号线连接有第一驱动模块,第二驱动模块,第三驱动模块,第四驱动模块,第五驱动模块和第六驱动模块;所述第一驱动模块通过信号线连接有移动电机;所述第二驱动模块通过信号线连接有旋转电机;所述第三驱动模块通过信号线连接有角度调整电机;所述第四驱动模块通过信号线连接有角度调整机构;所述第五驱动模块通过信号线连接有长度调整机构;所述第六驱动模块通过信号线连接有定位电机。
8.移动基台采用钢制金属底座,且移动基台的内部社会只有滑轨,该移动基台可通过其内部的滑轨在滑动底座的表面进行水平方向上的往复移动;所述移动基台的移动通过移动电机和减速器进行移动。
9.旋转底台采用前端为圆形后端为方向的钢制金属板,且旋转底台可通过其下方的旋转电机进行水平防线上的旋转,其旋转角度为360度;该的厚度为8公分,具有支持力。
10.调整臂采用长条形钢制金属臂,且调整臂的前端设置有安装长度调整机构的圆形孔洞,该调整臂前端的孔洞的直径与长度调整机构的直径一致;所述调整臂可在角度调整机构的推动下通过角度调整基座进行80度以内的旋转。
11.伸缩头采用与调整臂横截面一致的钢制金属臂,且伸缩头可通过长度调整机构进行延伸或缩回工作,该伸缩头的前端社会只有供连接板进行转动的开槽。
12.抓取机构内的抓取吸盘采用四个,且抓取机构内的抓取吸盘可通过伸展臂和啮合齿在支撑外壳的内部进行伸缩。
13.与现有技术相比,本实用新型具有如下有益效果:
14.1.本实用新型移动基台的设置,有利于可在水平移动的时候带动抓取机构及其表面的墙砖进行相应的水平移动,当本实用新型被固定在某一点之后依然可以进行大面积的铺砖工作,减少了高频率的搬动行为,提高铺砖的效率。
15.2.本实用新型旋转底台的设置,有利于通过旋转调整调整臂的朝向,可以将未铺设的墙砖放置在本实用新型的后方,通过旋转底台的180度旋转将后方的未铺设的墙砖由抓取机构进行抓取,然后再进行180度的旋转进行墙砖的铺设,可以自由的掌握未铺设的墙砖的放置,施工时不会被其阻碍。
16.3.本实用新型调整臂的设置,有利于在进行较高位置的铺设时通过调整臂进行抓取机构的高度调节,可以使抓取机构吸取的墙砖进行较高位置的铺设。
17.4.本实用新型伸缩头的设置,在调整臂将抓取机构提高的同时,抓取机构与墙壁之间的距离是不断变化的,本实用新型通过伸缩头将抓取机构与墙壁之间的距离进行微调,使抓取机构与墙壁之间距离适中保持在特定的数值内。
18.5.本实用新型抓取机构的设置,有利于可以满足不同大小的墙砖,抓取机构能控制末端抓取吸盘的位置,使抓取机构可以轻易的抓取不同尺寸的瓷砖,且其内部的超声波测距设备采用hy
‑
srf05五针超声波传感器模块,其相较于其他的超声波传感器主要优越性能为其可以对2cm
‑
450cm的距离进行非接触式距离测量,此非接触式测量功能的精度可以
达到3mm。能够满足在工地环境下的需求超声波的操作时序,按照时序图进行软件编程,在进行编程时我们利用单片机的io口提供一个10us以上的脉冲信号,该模块将从内部发出8个40khz的周期电平并检测回波,因此我们可以通过发射信号到收到回响信号的时间间隔计算得到距离;其内部的陀螺仪能够测量被测物体的旋转角速度,结合自动墙砖机的运动云台可以检测云台在抓取墙砖之后,是否能够将墙砖水平的放置在水泥会面上,如果墙砖放置不水平的话,陀螺仪会将倾角数据传送到单片机,进行分析。如若墙砖不能被水平放置,单片机会控制云台上方的震动器开始震动,直至单片机分析陀螺仪的数据为水平状态时则停止震动。然后进行下一块墙砖的铺设。本设计使用的陀螺仪,寿命长,能够在较为恶劣的环境中工作,结构更简单,质量更加轻便,有利于实时监测调节装置和铺设墙砖之后是否达到水平状态,保证自动墙砖机能够安全可靠的运行。
附图说明
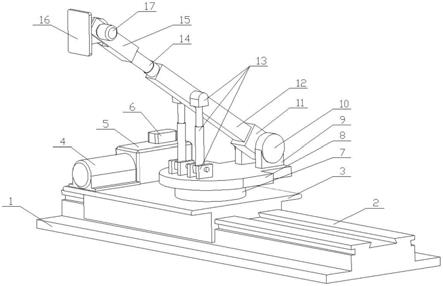
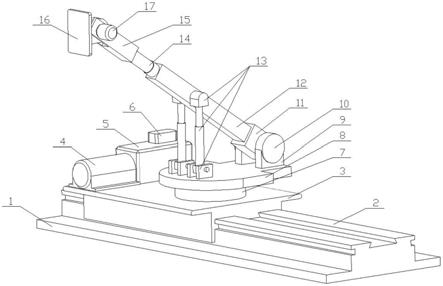
19.图1是本实用新型的结构示意图。
20.图2是本实用新型抓取机构的结构示意图。
21.图3是本实用新型的控制电路连接示意图。
22.图中:
[0023]1‑
支撑底台,2
‑
滑动底座,3
‑
移动基台,4
‑
移动电机,5
‑
减速器,6
‑
控制器,61
‑
dps模块,62
‑
无线接收模块,63
‑
看门狗模块,64
‑
检测模块,65
‑
第一驱动模块,66
‑
第二驱动模块,67
‑
第三驱动模块,68
‑
第四驱动模块,69
‑
第五驱动模块,610
‑
第六驱动模块,7
‑
旋转电机,8
‑
旋转底台,9
‑
角度调整座,10
‑
角度调整电机,11
‑
角度调整基座,12
‑
调整臂,13
‑
角度调整机构,14
‑
长度调整机构,15
‑
伸缩头,16
‑
连接板,17
‑
定位电机,18
‑
抓取机构,181
‑
支撑外壳,182
‑
伸展臂,183
‑
啮合齿,184
‑
泄气管,185
‑
抓取吸盘。
具体实施方式
[0024]
为了使本技术领域的人员更好地理解本实用新型方案,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
[0025]
如附图1至附图3所示。
[0026]
本实用新型提供的一种墙砖自动铺砌机,包括支撑底台1,滑动底座2,移动基台3,移动电机4,减速器5,控制器6,旋转电机7,旋转底台8,角度调整座9,角度调整电机10,角度调整基座11,调整臂12,角度调整机构13,长度调整机构14,伸缩头15,连接板16,定位电机17和抓取机构18,其中:滑动底座2通过螺栓安装在支撑底台1的表面,且移动基台3镶嵌在滑动底座2的表面,并通过齿轮进行啮合,该移动电机4通过螺栓安装在移动基台3的一端;所述减速器5通过螺栓安装在移动基台3的一端,并通过齿轴与移动电机4进行连接,且减速器5通过齿轴与移动基台3内部的齿轮进行啮合,该控制器6通过螺栓安装在减速器5的表面;所述旋转电机7通过螺栓安装在移动基台3的表面,且旋转底台8通过螺栓与旋转电机7进行连接,该角度调整座9通过螺栓安装在旋转底台8的后端;所述角度调整基座11通过轴承安装在角度调整座9的内部,且角度调整电机10通过螺栓安装在角度调整座9的一侧,并
通过齿轴与角度调整基座11相连接,该调整臂12通过螺栓安装在角度调整基座11的前端;所述角度调整机构13的一端通过轴承安装在角度调整基座11的两侧,且角度调整机构13的另一端通过轴承安装在旋转底台8的表面,该长度调整机构14通过螺栓安装在调整臂12一端的内部;所述伸缩头15通过螺栓安装在长度调整机构14的另一端,且连接板16通过轴承安装在伸缩头15的一端,该定位电机17通过螺栓安装在伸缩头15的一侧,并通过齿轴与连接板16的底部相连接;所述抓取机构18通过螺栓安装在连接板16的表面。
[0027]
本实用新型提供的一种墙砖自动铺砌机,支撑底台1用于固定在地面上,防止在工作过程中出现倾斜的情况发生;滑动底座2用于为移动基台3提供支撑力,使移动基台3可以按照规定路径进行移动;移动基台3采用钢制金属底座,且移动基台3的内部社会只有滑轨,该移动基台3可通过其内部的滑轨在滑动底座2的表面进行水平方向上的往复移动;所述移动基台3的移动通过移动电机4和减速器5进行移动;移动电机4和减速器5配合使用,驱动移动基台3进行匀速移动;旋转电机7可带动旋转底台8进行转动;旋转底台8采用前端为圆形后端为方向的钢制金属板,且旋转底台8可通过其下方的旋转电机7进行水平防线上的旋转,其旋转角度为360度;该的厚度为8公分,具有支持力;角度调整座9用于安装角度调整基座11;角度调整电机10与角度调整机构13配合使用,为调整臂12的转动提供支持力;角度调整基座11用于安装调整臂12;调整臂12采用长条形钢制金属臂,且调整臂12的前端设置有安装长度调整机构14的圆形孔洞,该调整臂12前端的孔洞的直径与长度调整机构14的直径一致;所述调整臂12可在角度调整机构13的推动下通过角度调整基座11进行80度以内的旋转;角度调整机构13可推动调整臂12;伸缩头15采用与调整臂12横截面一致的钢制金属臂,且伸缩头15可通过长度调整机构14进行延伸或缩回工作,该伸缩头15的前端社会只有供连接板16进行转动的开槽。抓取机构18内的抓取吸盘185采用四个,且抓取机构18内的抓取吸盘185可通过伸展臂182和啮合齿183在支撑外壳181的内部进行伸缩;连接板16用于安装抓取机构18;定位电机17可控制连接板16进行角度的调节;抓取机构18内的抓取吸盘采用四个,且抓取机构内的抓取吸盘可通过伸展臂和啮合齿在支撑外壳的内部进行伸缩。
[0028]
利用本实用新型所述技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。