1.本发明一种用于机械手感知的柔性传感阵列及其制备和应用方法,属于柔性传感器技术领域。
背景技术:
2.随着柔性基质材料的发展,柔性传感器应运而生。柔性传感器具有柔韧、延展、可自由弯曲甚至折叠、便于携带、可穿戴等特点。按照用途,可分为柔性压力传感器、柔性气体传感器、柔性湿度传感器、柔性温度传感器、柔性应变传感器、柔性磁阻抗传感器和柔性热流量传感器等;按照感知机理可分为柔性电阻式传感器、柔性电容式传感器、柔性压磁式传感器和柔性电感式传感器等。
3.柔性传感器结构形式灵活多样,可根据测量条件的要求任意布置,能够非常方便地对特殊环境与特殊信号进行精确快捷测量,解决了传感器的小型化、集成化、智能化发展问题,这些新型柔性传感器在电子皮肤、生物医药、可穿戴电子产品和航空航天中有重要作用。但是利用柔性传感器阵列和机械手结合,实现机械手对物体的接近和形状大小的检测这一领域,鲜有人研究。如何将柔性传感器的优势应用到机械手的感知方面,是很有意义且亟待解决的课题。
技术实现要素:
4.本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种用于机械手感知的可穿戴柔性传感器阵列硬件结构的改进及制备方法的改进。
5.为了解决上述技术问题,本发明采用的技术方案为:一种用于机械手感知的柔性传感阵列,包括柔性压阻传感单元、柔性电容传感单元、薄膜基底和电极,所述薄膜基底上设置有叉指电极阵列,电极阵列上对应设置有压阻传感贴片和电容传感贴片,组成传感器阵列,其中所述压阻传感单元为压力传感单元,电容传感单元为接近及压力传感单元;传感阵列中传感单元需具有一致的传感特性,所述柔性压阻传感单元由多个面积及体积一致的裁切于同一块传感材料的压阻传感贴片组成;所述柔性电容传感单元由一个或多个面积及体积一致的裁切于同一块传感材料的电容传感贴片组成。
6.所述传感器阵列分别安装在机械手的手掌和手指上,手掌处的传感器阵列用来测量机械手抓取物体的形状、大小和接近,手指处的传感器阵列用来测量机械手对物体的抓力;机械手根据测量到的物体的数据,调整施加给物体的抓力,形成机械手和被抓物体间的双向反馈。
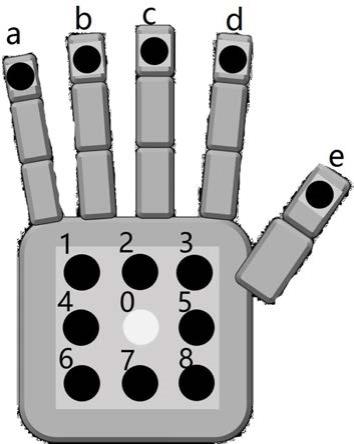
7.布置于手掌的接近和压力柔性传感阵列为矩形或圆形的对称图形,各由传感单元以相等间距在各方向对齐排布;其中电电容传感单元位于手掌处传感阵列中,排布在除最外层之外的位置,且每个电容传感单元周围排布电阻传感单元;
所述传感器阵列通过改变传感单元的数量来调整传感器阵列的像素,实现不同的分辨率被测物体识别。
8.所述压阻传感贴片由弹性橡胶和一维导电纳米材料、二维导电纳米材料共同混合的复合材料制成,内部具有稳定致密的微型孔隙结构。
9.所述电容传感贴片由与压阻传感贴片材料一致的弹性橡胶制成。
10.所述电极布置于薄膜基底上,具体采用共面叉指电极阵列,以打印或刻蚀的方式加工在在薄膜基底上;电极材料采用纳米导电材料。
11.一种用于机械手感知的柔性传感阵列的制备方法,包括如下步骤:第一步:将一维导电纳米材料和二维导电纳米材料按照一定比例混合,配置复合导电纳米材料,加入烧杯中;再加入sebs粉末用玻璃棒搅拌均匀;第二步:向烧杯中加入无水乙醇,使无水乙醇能够没过材料;将烧杯放入超声机中超声后用鼓风干燥箱加热直到乙醇完全挥发;将干燥后的材料进行研磨,得到混合均匀的复合纳米材料;第三步:向混合均匀的复合纳米材料中加入石蜡油,用玻璃棒搅拌均匀;将混合好的材料,装入坩埚中铺平,再放入箱式炉中,在150
‑
250℃下加热15
‑
30分钟固化,得到一定厚度的压阻传感弹性材料;第四步:另取一个干净的烧杯,加入设定含量的sebs粉末与石蜡油,重复步骤三,得到一定厚度的电容传感弹性材料;第五步:将得到的压阻传感弹性材料和电容传感弹性材料切割成面积与体积一致的多个设定形状;第六步:用打印或刻蚀方法在一定厚度的柔性薄膜上加工电极,将加工好的电极放入鼓风干燥箱中80℃
‑
110℃加热固化;第七步:将切割好的传感材料弹性体和电极一一对应粘合,组装成传感器阵列,包括电容传感器单元和压阻传感器单元,制得基于复合纳米材料的弹性橡胶可穿戴柔性传感阵列;步骤八:对柔性传感器阵列进行防潮、恒温的功能性封装,封装厚度不超过5mm。
12.所述第一步中的一维导电纳米材料和二维导电纳米材料的混合比例为0.5
‑
2:1;所述第一步中sebs和复合导电纳米材料的质量比为1:0.2
‑
0.5;所述第三步中石蜡油和sebs的质量比为2
‑
4:1。
13.一种用于机械手感知的柔性传感阵列的应用方法,包括如下步骤:第一步:将由压阻传感单元和电容传感单元组成的柔性传感器阵列根据需求粘贴在机械手掌处,将柔性压阻传感器阵列粘贴在五个手指指尖处,要求基底一侧与机械手安装在一起,传感阵列一侧朝外;第二步:柔性传感阵列接入数据采集电路中,进行电阻与电容信号采集;第三步:对传感器采集数据进行分析与学习,实现物体材质、形状与接近距离的判断;第四步:根据被测物体信息进行机械手力控制,实现易损物体抓取动作。
14.本发明相对于现有技术具备的有益效果为:本发明提供的用于机械手感知的基于复合纳米材料的柔性接近和压力传感阵列,集成了柔性压阻传感器和电容传感器。将该传
感器阵列组装在机械手上,可以实现机械手对物体接近,形状和大小的测量。
15.与现有技术相比,本发明压阻传感材料采用弹性橡胶与一维导电纳米材料和二维导电纳米材料共混的方式制备,具有重复性好,使用寿命长的特点,并且用该方法所制备的传感材料内部具有微型孔隙结构,提高了传感器的灵敏度。
16.本发明的传感单元阵列采用传感贴片和电极相结合的方式,可根据不同型号的机械手掌打印不同形状的电极,进而组装成可以和该机械手相贴合的传感器阵列,而且可以根据需要,通过改变传感贴片的数量来调整传感器阵列的像素,实现不同的分辨率被测物体识别,灵活性高且适用性广泛。本发明的传感贴片,均由同一块传感材料裁出,所以一致性较高;电容和压阻传感贴片采用相同的弹性橡胶,保证了各传感单元的弹性和抗疲劳特性接近;本发明的传感阵列由手掌部分传感器和手指部分传感器两部分组成,手掌部分用于测量物体的接近和形状大小,手指部分用于测量机械手对物体的抓力,实现了机械手和被抓取物体之间的双向反馈。
附图说明
17.下面结合附图对本发明做进一步说明:图1为本发明传感器阵列的电极和基底结构示意图;图2为本发明传感器阵列的平面结构示意图;图3为本发明同机械手结合的实物图;图4为采用本发明传感器阵列的机械手抓取圆柱形硬质水杯时手掌部分和手指部分各点位电阻变化率以及抓取时的实物图;图5为采用本发明传感器阵列的机械手抓取气球时手掌部分和手指部分各点位电阻变化率以及抓取时的实物图;图6为采用本发明传感器阵列的机械手接近不同导电物体时电容传感单元电容变化率;图中:图2和图3中的手掌的数字和数字对应,手指的字母和字母对应。
具体实施方式
18.如图1至图6所示,本发明一种用于机械手感知的基于复合纳米材料的柔性接近和压力传感阵列,包括:柔性压阻传感单元,柔性电容传感单元,薄膜基底,电极。
19.压阻传感单元为压力传感单元,由多个面积及体积一致的裁切于同一块传感材料的压阻传感贴片组成,形状为立方体或者圆柱体等,保证了传感阵列的一致性,其中传感贴片由弹性橡胶与一维导电纳米材料、二维导电纳米材料共同混合的复合材料制成,内部具有稳定致密的微型孔隙结构,保证了传感的灵敏度和可靠性。一维导电纳米材料易于形成导电通路,二维导电纳米材料可增强电导率,弹性橡胶保证了材料的可重复性,孔隙结构进一步增强了材料灵敏度且稳定了材料的结构。电容传感单元为接近传感单元,由多个面积及体积一致的裁切于同一块传感材料的电容传感贴片组成,其中电容传感贴片由与压阻传感贴片材料一致的弹性橡胶制成,使各传感单元的弹性和抗疲劳特性接近。
20.薄膜基底为柔性薄膜(50
‑
200μm),可以是橡胶,pet等材料。
21.电极为共面叉指电极阵列,材料可以是银,铜等纳米材料,以打印等方式加工在薄膜基底上,阵列的排布根据不同的机械手和需求而改变,保证了其灵活性和适用性。
22.传感贴片一一对应贴在电极阵列上,以相等间距各方向对齐排布组成传感器阵列,以准确检测物体形状;其中单个或少数个电容传感单元位于手掌处传感阵列中,且排布在除最外层之外的位置,以保证电阻传感单元检测待测物体形状;每个电容传感单元周围排布电阻传感单元,防止电容传感单元信号互相影响接近信号准确性;传感器阵列可通过改变传感贴片的数量来调整传感器阵列的像素,实现不同的分辨率被测物体识别;将由压阻传感单元和电容传感单元组成的柔性传感器阵列根据需求粘贴在机械手掌处,将柔性压阻传感器阵列粘贴在五个手指指尖处,要求基底一侧与机械手安装在一起,传感阵列一侧朝外;手掌处的传感器用来测量物体的形状和大小,手指处的电极用来测量机械手对物体的抓力,从而可以根据测量到的物体的形状和大小,调节机械手对物体的抓力;机械手可根据测量到的物体的数据,调整施加给物体的抓力,形成机械手和被抓物体间的双向反馈。
23.柔性传感阵列制备方法包括以下步骤:第一步:将一维导电纳米材料和二维导电纳米材料(如cnt和mxene)按照一定比例混合(0.5
‑
2:1),配置复合导电纳米材料,加入烧杯中。再加入sebs粉末,sebs和复合导电纳米材料的质量比为1:0.2
‑
0.5,用玻璃棒搅拌均匀。
24.第二步:向烧杯中加入无水乙醇,使无水乙醇能够没过材料。将烧杯放入超声机中超声后用鼓风干燥箱加热直到乙醇完全挥发。将干燥后的材料进行研磨,得到混合均匀的复合纳米材料。
25.第三步:向材料中加入石蜡油,(石蜡油和sebs的质量比为2.5
‑
3.5:1),用玻璃棒搅拌均匀。将混合好的材料,装入坩埚中铺平,再放入箱式炉中,在150
‑
250℃下加热15
‑
30分钟固化,得到一定厚度的压阻传感弹性材料。
26.第四步:另取一个干净的烧杯,加入适量sebs粉末加入石蜡油,重复步骤三,得到一定厚度的电容传感弹性材料。
27.第五步:将得到的压阻传感弹性材料和电容传感弹性材料切割成圆柱状,底面直径为10
‑
8mm。
28.第六步:用喷墨打印机在一定厚度(如50
‑
200μm)的柔性薄膜上打印电极,材料可以是金,银,铜等。将打印好的电极放入鼓风干燥箱中80℃
‑
110℃加热固化。
29.第七步:将切割好的传感材料弹性体和电极用胶水一对一粘合,组装成传感器阵列,包括电容传感器和压阻传感器。
30.第八步:对柔性传感阵列进行防潮、恒温等功能性封装,封装层厚度不超过5mm。
31.柔性传感阵列应用方法包括以下步骤:第一步:将由压阻传感单元和电容传感单元组成的柔性传感器阵列根据需求粘贴在机械手掌处,将柔性压阻传感器阵列粘贴在五个手指指尖处,要求基底一侧与机械手安装在一起,传感阵列一侧朝外;第二步:柔性传感阵列接入数据采集电路中,进行电阻与电容信号采集;第三步:对传感器采集数据进行分析与学习,实现物体材质、形状与接近距离的判断;
第四步:根据被测物体信息进行机械手力控制,实现易损物体抓取等动作。
32.使用基于sebs和复合纳米材料的可穿戴柔性传感器阵列进行机械手的感知检测方法,包括以下步骤:将制好的柔性传感器阵列固定在机械手手掌和手指处,并使用机械手去接近并抓取物体,通过测量仪器读取的传感器电容的变化和电阻的变化,分析得出物体的接近程度,物体的形状大小以及机械手施加的抓力。
33.下面结合具体实施例对本发明做进一步的详细说明,但是本发明的保护范围并不限于这些实施例,凡是不背离本发明构思的改变或等同替代均包括在本发明的保护范围之内。
34.例一:一种用于仿生机械手感知的基于复合纳米材料的柔性接近和压力传感阵列,包括:薄膜基底,电极,柔性压阻传感单元,柔性电容传感单元。
35.薄膜基底为100μm的pet薄膜。
36.电极2为3
ⅹ
3叉指电极阵列,材料可以是银,铜等纳米材料,打印在薄膜基底上。
37.柔性压阻传感单元由多个来自同一块传感材料且大小一致的压阻传感贴片组成,传感贴片由复合纳米材料作为敏感材料,形状为立方体或者圆柱体等,厚度为3
‑
3.5mm。
38.柔性电容传感单元为电容传感贴片,由sebs和石蜡制成,形状大小同压阻传感单元一致。
39.传感贴片一一对应贴在电极2上,组成传感器阵列,分别安装在机械手的手掌和手指处。
40.一种用于仿生机械手物体识别的复合纳米材料弹性橡胶可穿戴柔性传感阵列,制备方法包括以下步骤:第一步:按照mxene和cnt质量比为1:1的比例,配置0.9g复合导电纳米材料,加入烧杯中。再按照sebs粉末和复合纳米材料质量比1:0.3的比例,加入3g sebs粉末,用玻璃棒搅拌均匀。
41.第二步:向烧杯中加入适量无水乙醇,使无水乙醇能够没过材料。将烧杯放入超声机中超声5分钟,然后用鼓风干燥箱,在80℃下加热直到乙醇完全挥发。将干燥后的材料进行研磨,得到混合均匀的复合纳米材料。
42.第三步:按照石蜡油和sebs质量比3:1的比例,向材料中加入石蜡油,用玻璃棒搅拌均匀。将混合好的材料,装入4cm
ⅹ
8cm的坩埚中铺平,再放入箱式炉中,225℃加热25分钟固化,得到厚度为3
‑
3.5mm的压阻传感弹性体。
43.第四步:另取一个干净的烧杯,加入3g sebs粉末,重复步骤三,得到厚度为3
‑
3.5mm的电容传感弹性体。
44.第五步:将得到的压阻传感弹性体和电容传感弹性体切割成圆柱状,底面直径为8mm。
45.第六步:用喷墨打印机在100μm厚的pet膜上打印电极,电极为3
ⅹ
3的叉指电极阵列和5个单独的叉指电极,打印材料为cp12银墨水。将打印好的电极放入鼓风干燥箱中110℃加热20分钟固化。
46.第七步:将切割好的传感材料弹性体和电极用胶水一对一粘合,组装成手掌部分
传感器阵列,其中中间是一个电容传感器,其余为压阻传感器,和手指部分压阻传感器。
47.第八步:对柔性传感阵列进行防潮、恒温等功能性封装,封装层厚度不超过5mm。
48.一种用于仿生机械手物体识别的复合纳米材料弹性橡胶可穿戴柔性传感阵列,应用方法包括以下步骤:第一步:将由压阻传感单元和电容传感单元组成的柔性传感器阵列根据需求粘贴在机械手掌处,将柔性压阻传感器阵列粘贴在五个手指指尖处,要求基底一侧与机械手安装在一起,传感阵列一侧朝外;第二步:柔性传感阵列接入数据采集电路中,进行电阻与电容信号采集;第三步:对传感器采集数据进行分析与学习,实现物体材质、形状与接近距离的判断;第四步:根据被测物体信息进行机械手力控制,实现易损物体抓取等动作。
49.例二:一种用于三指机械手感知的基于复合纳米材料的柔性接近和压力传感阵列,包括:薄膜基底,电极,柔性压阻传感单元,柔性电容传感单元。
50.薄膜基底为50μm的pet薄膜。
51.电极为叉指电极阵列,材料可以是银,铜等纳米材料,打印在薄膜基底上。
52.压阻传感单元由多个来自同一块传感材料且大小一致的压阻传感贴片组成,传感贴片由cnt作为敏感材料,形状为立方体或者圆柱体等,厚度为3
‑
3.5mm。
53.电容传感单元为电容传感贴片,由sebs和石蜡制成,形状大小同压阻传感单元一致。
54.传感贴片一一对应贴在电极上,组成传感器阵列,分别安装在三指机械手的手心和手指处。
55.一种用于三指机械手物体识别的基于sebs和复合纳米材料的可穿戴柔性传感器阵列,制备方法包括以下步骤:第一步:按照sebs和cnt质量比为1:0.15的比例,配置3g导电纳米材料,加入烧杯中,用玻璃棒搅拌均匀。
56.第二步:向烧杯中加入适量无水乙醇,使无水乙醇能够没过材料。将烧杯放入超声机中超声5分钟,然后用鼓风干燥箱,在80℃下加热直到乙醇完全挥发。将干燥后的材料进行研磨,得到混合均匀的复合纳米材料。
57.第三步:按照石蜡油和sebs质量比3:1的比例,向材料中加入石蜡油,用玻璃棒搅拌均匀。将混合好的材料,装入4cm
ⅹ
8cm的坩埚中铺平,再放入箱式炉中,225℃加热25分钟固化,得到厚度为3
‑
3.5mm的压阻传感弹性体。
58.第四步:另取一个干净的烧杯,加入3g sebs粉末,重复步骤三,得到厚度为3
‑
3.5mm的电容传感弹性体。
59.第五步:将得到的压阻传感弹性体和电容传感弹性体切割成圆柱状,底面直径为8mm。
60.第六步:用喷墨打印机在50μm厚的pet膜上打印电极,电极为3个3
ⅹ
1的叉指电极阵列,打印材料为cp12银墨水。将打印好的电极放入鼓风干燥箱中110℃加热20分钟固化。
61.第七步:将切割好的传感材料弹性体和电极用胶水一对一粘合,组装成手掌部分
传感器阵列,其中中间是一个电容传感器,其余为压阻传感器,和手指部分压阻传感器。
62.第八步: 对柔性传感阵列进行防潮、恒温等功能性封装,封装层厚度不超过5mm。
63.一种用于三指机械手物体识别的基于sebs和复合纳米材料的可穿戴柔性传感器阵列,应用方法包括以下步骤:第一步:将由压阻传感单元和电容传感单元组成的柔性传感器阵列根据需求粘贴在三指机械手手心处,将柔性压阻传感器阵列粘贴在三个手指指尖处,要求基底一侧与机械手安装在一起,传感阵列一侧朝外;第二步:柔性传感阵列接入数据采集电路中,进行电阻与电容信号采集;第三步:对传感器采集数据进行分析与学习,实现物体材质、形状与接近距离的判断;第四步:根据被测物体信息进行机械手力控制,实现易损物体抓取等动作。
64.使用复合纳米材料弹性橡胶可穿戴柔性传感阵列进行机械手的感知检测方法,包括以下步骤:将制好的柔性传感器阵列固定在机械手手心和手指上,同时传感阵列接入数据采集电路中,进行电阻与电容信号采集,便可通过检测仪器检测的电容变化分析出物体的接近,通过检测的电阻变化分析出机械手手指所施加压力的大小,以及手掌所受压力大小和施压物体的形状。
65.将导电物体接近机械手的手心,电容传感器的电容便会发生变化。物体距机械手掌越近,电容变化率越大。所以可以通过电容变化的大小,分析出机械手和物体间的距离。
66.使用手掌和金属片分别向机械手掌处接近,距离从20cm到1cm,测试结果如图6所示。从图6中可以看出,当接近距离在10cm以内时,传感器对距离的响应非常灵敏。
67.让机械手抓住物体,此时物体已经完全压在手掌部分传感器阵列上。若物体为不规则形状,那么不同位置的传感器所受压力不一样,所受压力越大,电阻变化越大。据此原理,通过各方位压阻传感器电阻变化的比较,可以分析出物体的形状。同时手指部分的压阻传感器可以对机械手手指施加的压力进行反馈,进而可以控制机械手对不同重量的物体施加不同大小的力。
68.使用机械手分别抓取水杯(圆柱状),气球两个个不同形状和重量的物体,分为测试各个方位压阻传感器的电阻变化率(δr/r0),测试结果如图4和图5所示。可以看出,当抓取不同形状的物体时,手掌部分传感器阵列上每个点的传感器的电阻变化率不同。可以通过比较每个点的电阻变化率大小,分析出所抓取物体的形状。同时通过比较手指部分传感器电阻变化率不同,可以分析出对于不同质量的物体,机械手手指所施加的力的大小。
69.上述的复合纳米材料弹性橡胶可穿戴柔性传感阵列的应用,还可以通过集成温度传感器,ph传感器等,实现机械手更多维的感知,为柔性电子器件提供新的应用方向。
70.关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得
相应的实体产品。
71.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。