1.本发明属于石油勘探井下仪器技术领域,涉及一种井下工况安全评估方法及系统。
背景技术:
2.钻柱组件是钻井作业系统的核心组件,广泛应用于石油领域的各种井下钻探和勘测。随着应用环境和作业工况的不断复杂化,钻柱井下作业时的工况和安全评估成为领域内研究的重要方向。中国专利cn201710629548.6《井下钻柱粘滑特征的地面快速评价方法和装置》公开了一种井下钻柱粘滑特征的地面快速评价方法和装置,该系统通过获取钻柱动态信息得到地面粘滑指数,并由此确定井下钻柱粘滑特征。但是在实际作业过程中,由于井壁与钻柱之间存在摩阻因素,仅仅依据粘滑参数指标不足以准确地评价不同井况下井下钻柱的实际作业工况和安全状态。
技术实现要素:
3.为了更加准确地评价井下钻柱的工况安全状态,本发明旨在提供一种井下工况安全评估方法及系统。
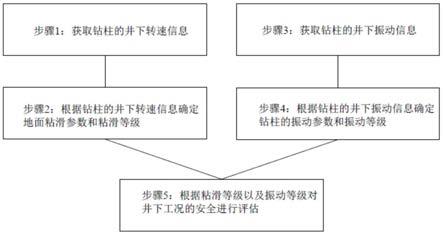
4.根据本发明的一方面,一种井下工况安全评估方法,包括以下步骤:
5.步骤1:获取钻柱的井下转速信息;
6.步骤2:根据钻柱的井下转速信息确定地面粘滑参数和粘滑等级;
7.步骤3:获取钻柱的井下振动信息;
8.步骤4:根据钻柱的井下振动信息确定钻柱的振动参数和振动等级;
9.步骤5:根据粘滑等级以及振动等级对井下工况的安全进行评估。
10.进一步地,步骤1所述井下转速信息包括井下钻柱在预设时间内的最大转速、最小转速和平均转速。
11.进一步地,步骤1包括:
12.采用磁阻传感器对分别代表地球磁场在x、y两个方向上的分矢量值mx和my分别进行连续采样,进行平滑滤波后根据等式1计算钻具所处磁工具面角度mtf,
13.mtf=arctan(
‑
my/mx) mtf0
ꢀꢀꢀ
(1)
14.其中,mtf0为磁工具面角度初始修正值;
15.根据等式2每固定时间间隔计算一次转速rpm,
16.rpm=δmtf
÷
2π
÷
10
×
60000
ꢀꢀꢀ
(2)
17.其中,δmtf为固定时间间隔的磁工具面角度差;
18.每固定时间间隔统计一次最大转速rpm
max
、最小转速rpm
min
和平均转速rpm
avg
。
19.进一步地,步骤2包括:
20.根据以下等式3计算粘滑参数stick_slip,
21.stick_slip=((rpm
max
‑
rpm
min
)/(2*rpm
avg
)*100)%
ꢀꢀꢀꢀ
(3)
22.其中,rpm
max
、rpm
min
、rpm
avg
分别为井下钻柱在预设时间内的最大转速、最小转速和平均转速;
23.根据所得粘滑参数将粘滑度分为不同的等级。
24.进一步地,步骤3所述振动信息包括横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值。
25.进一步地,步骤3包括:
26.采用兼容两种量程的三轴加速度传感器,进行振动信息测量;根据等式4每固定时间间隔计算一次三轴振动,
[0027][0028]
其中,a
li
、a
xi
、a
yi
分别代表横向振动的有效值、x轴方向的振动值、y轴方向的振动值,其中,i代表测量次数。
[0029]
进一步地,步骤4包括:
[0030]
根据等式5、等式6每固定时间间隔计算一次横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值,
[0031][0032][0033]
其中,a
l
、a
z
分别为每固定时间间隔测得的横向振动的有效值、轴向振动有效值;a
l1
、a
l2
……
a
l1000
分别为每固定时间间隔测得的横向振动有效值;a
z1
、a
z2
……
a
z1000
分别为每固定时间间隔测得的轴向振动有效值;
[0034]
根据所得振动参数将井下振动分为不同的等级。
[0035]
根据本发明的另一方面,一种井下工况安全评估系统,包括:
[0036]
钻柱的井下转速信息获取模块,用于获取钻柱的井下转速信息;
[0037]
地面粘滑参数和粘滑等级确定模块,用于根据井下钻柱在预设时间内的最大转速、最小转速和平均转速确定地面粘滑参数和粘滑等级;
[0038]
钻柱的井下振动信息获取模块,用于获取钻柱的井下振动信息,所述钻柱的井下振动信息包括横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值;
[0039]
钻柱的振动参数和振动等级确定模块,用于根据每固定时间间隔测得的三轴振动参数计算每固定时间间隔横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值,进而根据所得振动参数将井下振动分为不同的等级;
[0040]
安全评估模块,用于根据粘滑等级以及振动等级对井下工况的安全进行评估。
[0041]
进一步地,所述钻柱的井下转速信息获取模块包括磁阻传感器,所述井下转速信息包括井下钻柱在预设时间内的最大转速、最小转速和平均转速。
[0042]
进一步地,所述钻柱的井下振动信息获取模块包括兼容两种量程的三轴加速度传感器,所述三轴加速度传感器的电路板独立设计,直接固定在钻柱本体上。
[0043]
与现有技术相比,根据本发明实施例的井下工况安全评估方法及系统,可以更加
准确地评估井下钻柱的工况和安全状态,提高钻进效率,防止损坏井下仪器。
附图说明
[0044]
图1为根据本发明实施例的井下工况安全评估方法的流程图;
[0045]
图2为根据本发明实施例的井下工况安全评估系统的结构示意图。
具体实施方式
[0046]
下面结合附图和具体实施例对本发明进行详细说明。
[0047]
如图1所示,根据本发明实施例的一种井下工况安全评估方法,包括以下步骤:
[0048]
步骤1:获取钻柱的井下转速信息;
[0049]
采用磁阻传感器对分别代表地球磁场在x、y两个方向上的分矢量值mx和my分别进行连续采样,进行平滑滤波后根据等式1计算钻具所处磁工具面角度mtf,
[0050]
mtf=arctan(
‑
my/mx) mtf0
ꢀꢀꢀ
(1)
[0051]
其中,mtf0为磁工具面角度初始修正值;其中,当mx>0,my<0时,mtf0=0;当mx>0,my>0时,mtf0=2π;当mx<0时,mtf0=π;
[0052]
根据等式2每10ms计算一次转速rpm,
[0053]
rpm=δmtf
÷
2π
÷
10
×
60000
ꢀꢀꢀ
(2)
[0054]
其中,δmtf为10ms时间间隔的磁工具面角度差;
[0055]
每10s统计一次最大转速rpm
max
、最小转速rpm
min
和平均转速rpm
avg
。得到包括井下钻柱在预设时间内的最大转速、最小转速和平均转速的井下转速信息;
[0056]
步骤2:根据钻柱的井下转速信息确定地面粘滑参数和粘滑等级;
[0057]
根据以下等式3计算粘滑参数stick_slip,
[0058]
stick_slip=((rpm
max
‑
rpm
min
)/(2*rpm
avg
)*100)%
ꢀꢀꢀ
(3)
[0059]
其中,rpm
max
、rpm
min
、rpm
avg
分别为井下钻柱在预设时间内的最大转速、最小转速和平均转速;
[0060]
根据所得粘滑参数将粘滑度分为不同的等级,具体对应关系如表1。
[0061]
表1
[0062]
粘滑%粘滑等级<20%020%~40%140%~60%260%~80%380%~100%4100%~120%5>120%6
[0063]
步骤3:获取钻柱的井下振动信息;
[0064]
采用兼容两种量程(0~40g和0~200g)的三轴加速度传感器,进行振动信息测量;根据等式4每10ms计算一次三轴振动,
[0065][0066]
其中,a
li
、a
xi
、a
yi
分别代表横向振动的有效值、x轴方向的振动值、y轴方向的振动值,其中,i代表测量次数。
[0067]
得到包括每10ms的横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值的振动信息;
[0068]
步骤4:根据钻柱的井下振动信息确定钻柱的振动参数和振动等级;
[0069]
根据等式5、等式6每10s计算一次横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值,
[0070][0071][0072]
其中,a
l
、a
z
分别为每10s测得的横向振动的有效值、轴向振动有效值;a
l1
、a
l2
……
a
l1000
分别为每10ms测得的横向振动有效值;a
z1
、a
z2
……
a
z1000
分别为每10ms测得的轴向振动有效值;
[0073]
根据所得振动参数将井下振动分为不同的等级,不同的等级对应井下不同等级的振动工况,如表2。
[0074]
表2
[0075][0076][0077]
步骤5:根据粘滑等级以及振动等级对井下工况的安全进行评估。
[0078]
将所测的粘滑参数和振动参数进行存储和实时上传,根据粘滑等级以及振动等级对井下工况的安全进行评估,具体的,当粘滑等级小于等于3,横向振动等级小于等于5,并且轴向振动等级小于等于4,将井下工况评估为安全。
[0079]
需要说明的是,在不同的实际作业环境中,还可以根据本发明主旨测得的粘滑等级、横向振动等级和轴向振动等级,进行不同的区分判定。
[0080]
粘滑参数和振动参数可以实时上传同时进行存储。实时上传的测量参数可以用于实时评估井下工况,提高钻进效率,防止损坏井下仪器。存储的数据以供用户起钻后在地面分析数据,评估井下的振动程度,并将这些振动数据与井下的振动事件、设备运行情况及故障原因结合分析。
[0081]
本实施例的井下工况安全评估方法,在仪器不进行返厂维保的情况下,通过远程
标定软件采集不同标定阶段的数据并回传工厂,工厂将回传数据导入数据处理软件生成标定系数并发回,标定现场使用软件将系数写入探管,完成定向传感器的标定。同时,去除电流对定向传感器的干扰,保证仪器的标定效果。
[0082]
需要说明的,步骤1、2和步骤3、4可同时进行。以上步骤记载的次序并不代表了步骤执行的先后次序。在其它实施例中步骤3、4可在步骤1、2之前执行。
[0083]
图2为本发明井下工况安全评估系统实施例的结构示意图,如图2所示,本实施的井下工况安全评估系统包括:
[0084]
钻柱的井下转速信息获取模块,用于获取钻柱的井下转速信息;钻柱的井下转速信息获取模块包括磁阻传感器,钻柱的井下转速信息包括井下钻柱在预设时间内的最大转速、最小转速和平均转速;
[0085]
地面粘滑参数和粘滑等级确定模块,用于根据井下钻柱在预设时间内的最大转速、最小转速和平均转速确定地面粘滑参数和粘滑等级;
[0086]
钻柱的井下振动信息获取模块,用于获取钻柱的井下振动信息,所述钻柱的井下振动信息包括横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值;钻柱的井下振动信息获取模块包括兼容0~40g和0~200g两种量程的三轴加速度传感器,三轴加速度传感器的电路板独立设计,直接固定在钻柱本体上;
[0087]
钻柱的振动参数和振动等级确定模块,用于根据每固定时间间隔测得的三轴振动参数计算每固定时间间隔横向振动最大值、横向振动有效值、轴向振动最大值、轴向振动有效值,进而根据所得振动参数将井下振动分为不同的等级;
[0088]
安全评估模块,用于根据粘滑等级以及振动等级对井下工况的安全进行评估。
[0089]
上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。